Download as PDF, PPTX

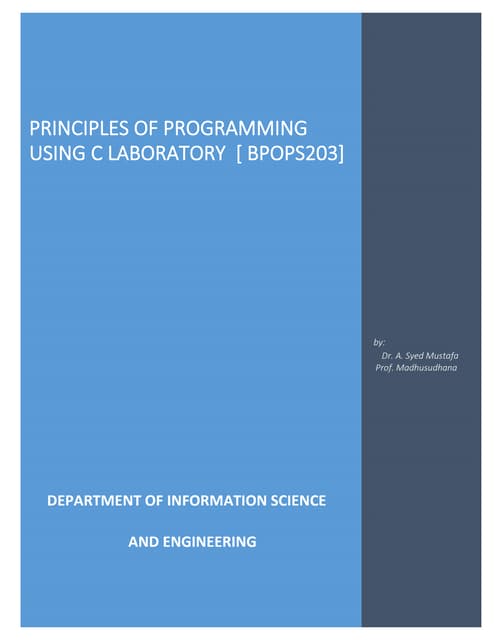
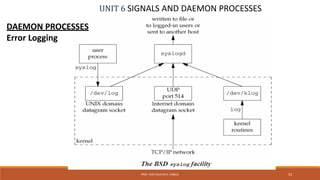
![UNIT 6 SIGNALS AND DAEMON PROCESSES
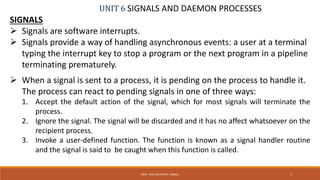
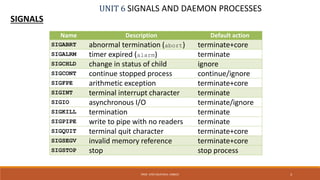
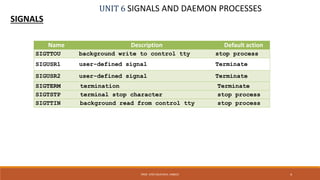
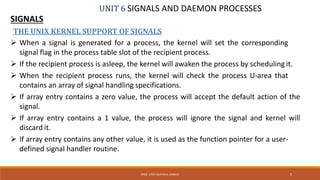
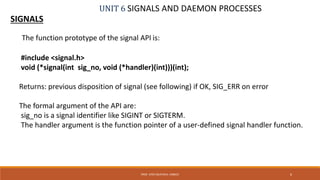
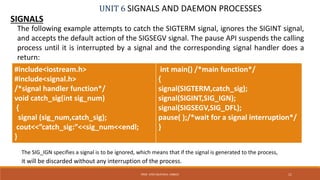
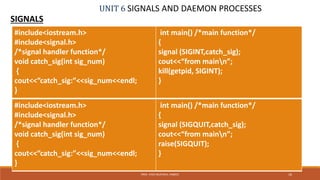
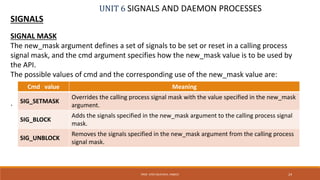
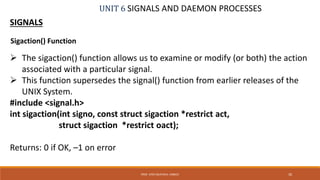
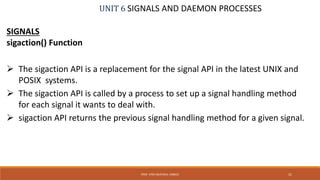
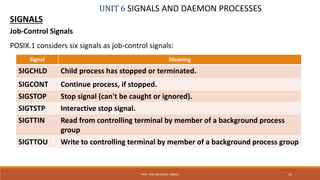
SIGNALS
13PROF. SYED MUSTAFA, HKBKCE
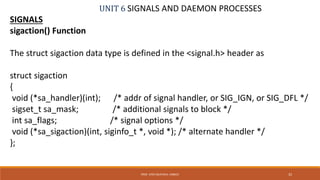
$ ./a.out & start process in background
[1] 7216 job-control shell prints job number and process ID
$ kill -USR1 7216 send it SIGUSR1
received SIGUSR1
$ kill -USR2 7216 send it SIGUSR2
received SIGUSR2
$ kill 7216 now send it SIGTERM
[1]+ Terminated ./a.out
When we send the SIGTERM signal, the process is terminated, since it doesn't catch the
signal, and the default action for the signal is termination.](https://image.slidesharecdn.com/uspnotes-unit6-8-160505161037/85/Usp-notes-unit6-8-13-320.jpg)
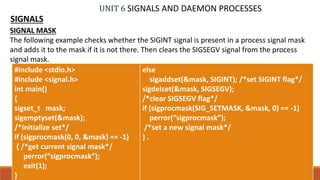
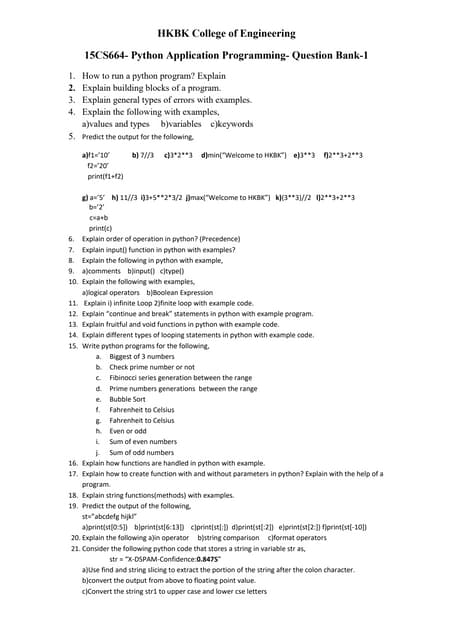
![UNIT 6 SIGNALS AND DAEMON PROCESSES
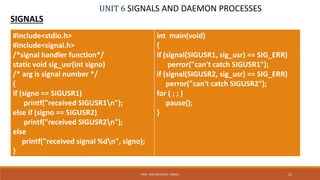
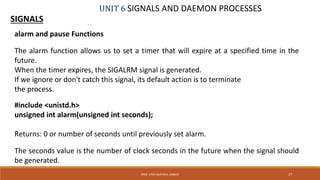
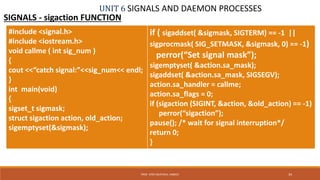
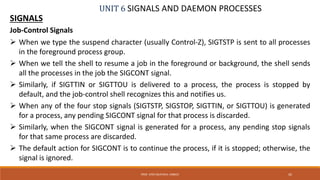
SIGNALS - sigaction FUNCTION
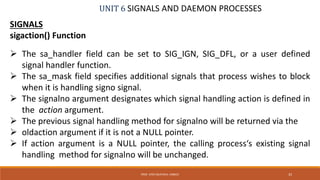
In the program, the process signal mask is set with SIGTERM signal.
The process then defines a signal handler for the SIGINT signal and also
specifies that the SIGSEGV signal is to be blocked when the process is
handling the SIGINT signal.
The process then terminates its execution via the pause API.
The output of the program would be as:
% cc sigaction.c –o sigaction
% ./sigaction &
[1] 495
% kill –INT 495
catch signal: 2
sigaction exits
[1] Done sigaction
35PROF. SYED MUSTAFA, HKBKCE](https://image.slidesharecdn.com/uspnotes-unit6-8-160505161037/85/Usp-notes-unit6-8-35-320.jpg)
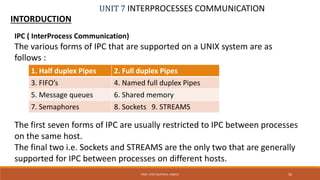
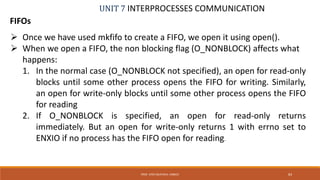
![UNIT 7 INTERPROCESSES COMMUNICATION
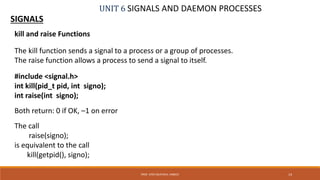
PIPES
A pipe is created by calling the pipe function.
#include <unistd.h>
int pipe(int fd[2]);
Returns: 0 if OK, –1 on error
Despite these limitations, half-duplex pipes are still the most commonly
used form of IPC.
Every time we type a sequence of commands in a pipeline for the shell to
execute, the shell creates a separate process for each command and links
the standard output of one to the standard input of the next using a pipe.
58PROF. SYED MUSTAFA, HKBKCE](https://image.slidesharecdn.com/uspnotes-unit6-8-160505161037/85/Usp-notes-unit6-8-58-320.jpg)
![UNIT 7 INTERPROCESSES COMMUNICATION
PIPES
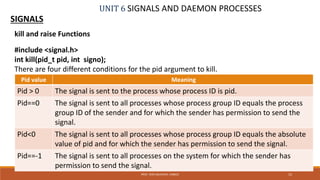
Two file descriptors are returned through the fd argument:
fd[0] is open for reading, and
fd[1] is open for writing.
The output of fd[1] is the input for fd[0].
POSIX.1 allows for an implementation to support full-duplex pipes.
For these implementations,
fd[0] and fd[1] are open for both reading and writing.
59PROF. SYED MUSTAFA, HKBKCE](https://image.slidesharecdn.com/uspnotes-unit6-8-160505161037/85/Usp-notes-unit6-8-59-320.jpg)
![UNIT 7 INTERPROCESSES COMMUNICATION
PIPES
63PROF. SYED MUSTAFA, HKBKCE
For a pipe from the parent to the child, the parent closes the read end of
the pipe (fd[0]), and the child closes the write end (fd[1]).](https://image.slidesharecdn.com/uspnotes-unit6-8-160505161037/85/Usp-notes-unit6-8-63-320.jpg)
![UNIT 7 INTERPROCESSES COMMUNICATION
PIPES
64PROF. SYED MUSTAFA, HKBKCE
For a pipe from the parent to the child, the parent closes the read end of
the pipe (fd[0]), and the child closes the write end (fd[1]).
For a pipe from the child to the parent, the parent closes fd[1], and the
child closes fd[0].](https://image.slidesharecdn.com/uspnotes-unit6-8-160505161037/85/Usp-notes-unit6-8-64-320.jpg)
![UNIT 7 INTERPROCESSES COMMUNICATION
PIPES
65PROF. SYED MUSTAFA, HKBKCE
For a pipe from the child to the parent, the parent closes fd[1], and the
child closes fd[0].](https://image.slidesharecdn.com/uspnotes-unit6-8-160505161037/85/Usp-notes-unit6-8-65-320.jpg)
![UNIT 7 INTERPROCESSES COMMUNICATION
PIPES
67PROF. SYED MUSTAFA, HKBKCE
Program to show the code to create a pipe between a parent and its child
and to send data down the pipe.
int main(void)
{
int n, fd[2];
pid_t pid;
char line[1000];
if (pipe(fd) < 0)
perror("pipe error");
if ((pid = fork()) < 0)
perror("fork error");
else if (pid > 0)
{ /* parent */
close(fd[0]);
write(fd[1], "hello worldn", 12);
}
else
{ /* child */
close(fd[1]);
n = read(fd[0], line,1000);
write(1, line, n);
}
exit(0);
}](https://image.slidesharecdn.com/uspnotes-unit6-8-160505161037/85/Usp-notes-unit6-8-67-320.jpg)
![UNIT 7 INTERPROCESSES COMMUNICATION
PIPES
68PROF. SYED MUSTAFA, HKBKCE
Program to show the code for I/O redirection using dup2().
#include<fcntl.h>
main()
{
int fd,fd2;
char c[256],con[]="This is simple file
for demonstration";
fd=open("sample1",O_RDWR|O_CR
EAT,0777);
printf("original file desc is %dn",fd);
fd2=dup2(fd,7);
printf("new file desc is %dn", fd2);
if(fd==-1)
perror("Can't creat file");
else if(read(fd2,&c,10)==0)
write(fd2,con,sizeof(con));
else
printf("%sn",c);
close(fd);
}](https://image.slidesharecdn.com/uspnotes-unit6-8-160505161037/85/Usp-notes-unit6-8-68-320.jpg)
![UNIT 7 INTERPROCESSES COMMUNICATION
PIPES
69PROF. SYED MUSTAFA, HKBKCE
Program to show the code for I/O redirection using dup().
#include<fcntl.h>
main()
{
int fd,fd2;
char c[256],con[]="This is simple file
for demonstration";
fd=open("sample1",O_RDWR|O_CR
EAT,0777);
printf("original file desc is %dn",fd);
fd2=dup(fd);
printf("new file desc is %dn", fd2);
if(fd==-1)
perror("Can't creat file");
else if(read(fd2,&c,10)==0)
write(fd2,con,sizeof(con));
else
printf("%sn",c);
close(fd);
}](https://image.slidesharecdn.com/uspnotes-unit6-8-160505161037/85/Usp-notes-unit6-8-69-320.jpg)
![UNIT 7 INTERPROCESSES COMMUNICATION
PIPES
70PROF. SYED MUSTAFA, HKBKCE
Program to show the code child writes to the parent through pipe.
#include<unistd.h>
#include<sys/types.h>
main()
{
pid_t pid;
int fd[2],s;
char c[5];
pipe(fd);
pid=fork();
if (pid==0)
{
close(fd[0]);
write(fd[1],"hello",5);
}
else
{
wait(&s);
close(fd[1]);
read(fd[0],c,5);
c[5]='0';
printf("%sn",c);
}
}](https://image.slidesharecdn.com/uspnotes-unit6-8-160505161037/85/Usp-notes-unit6-8-70-320.jpg)
![UNIT 7 INTERPROCESSES COMMUNICATION
PIPES
71PROF. SYED MUSTAFA, HKBKCE
Program to show the code for broken pipe.
#include<unistd.h>
#include<sys/types.h>
main()
{
pid_t pid;
int fd[2];
char c[5];
pipe(fd);
pid=fork();
if (pid>0)
{
close(fd[0]);
write(fd[1],"hello",5);
}
else
{
close(fd[0]); /*read end closed*/
sleep(1);
read(fd[0],c,5);
printf("%sn",c);
exit(0);
}
}](https://image.slidesharecdn.com/uspnotes-unit6-8-160505161037/85/Usp-notes-unit6-8-71-320.jpg)
![UNIT 7 INTERPROCESSES COMMUNICATION
PIPES
72PROF. SYED MUSTAFA, HKBKCE
Program to show the code for UNIX command redirection for “ls|wc -l”.
#include<fcntl.h>
main()
{
int p[2],pid;
pipe(p);
pid=fork();
if(pid==0)
{
close(p[0]);
printf("p[1]=%dn",p[1]);
dup2(p[1],1);
execl("/bin/ls","ls",(char *)0);
perror("from ls:");
}
else
{
close(p[1]);
printf("p[0]=%dn",p[0]);
dup2(p[0],0);
execl("/usr/bin/wc","wc","-l",(char *)0);
perror("from wc");
}
}](https://image.slidesharecdn.com/uspnotes-unit6-8-160505161037/85/Usp-notes-unit6-8-72-320.jpg)
![UNIT 7 INTERPROCESSES COMMUNICATION
PIPES
73PROF. SYED MUSTAFA, HKBKCE
Program to implement unix command “who|sort|wc –l”
main()
{
int p[2], q[2], pid, pid1;
pipe(p);
pid = fork();
if(0 == pid)
{
close(1);
close(p[0]);
dup(p[1]);
execlp("who", "who",0);
perror("error at cat");
}
else
{
pipe(q);
pid1 = fork();
if(0 == pid1)
{
close(1);
close(0);
close(p[1]);
close(q[0]);
dup(p[0]);
dup(q[1]);
execlp("sort", "sort", (char*)0);
perror("error at grep");
}
else
{
close(0);
close(q[1]);
close(p[1]);
close(p[0]);
dup(q[0]);
execl("/usr/bin/wc", "wc", "-l", 0);
perror("error at wc");
}
}
} //end of main()](https://image.slidesharecdn.com/uspnotes-unit6-8-160505161037/85/Usp-notes-unit6-8-73-320.jpg)
![UNIT 7 INTERPROCESSES COMMUNICATION
PIPES
78PROF. SYED MUSTAFA, HKBKCE
Program to sort the strings using popen().
#define MAXSTRS 4
int main(void)
{
int i;
FILE *pipe_fp;
char *strings[MAXSTRS] =
{ "echo", "bravo", "alpha", "charlie"};
/* Create 1 way pipe line with call to popen() */
pipe_fp = popen("sort", "w");
if (pipe_fp== NULL)
{
perror("popen");
exit(1);
}
/* Processing loop */
for(i=0; i<MAXSTRS; i++)
{
fputs(strings[i], pipe_fp);
fputc('n', pipe_fp);
}
/* Close the pipe */
pclose(pipe_fp);
return(0);
}](https://image.slidesharecdn.com/uspnotes-unit6-8-160505161037/85/Usp-notes-unit6-8-78-320.jpg)
![UNIT 7 INTERPROCESSES COMMUNICATION
PIPES
79PROF. SYED MUSTAFA, HKBKCE
Program to implement UNIX command redirection for “ls|sort” using popen().
int main(void)
{
FILE *pipein_fp, *pipeout_fp;
char readbuf[80];
/* Create one way pipe line with call to popen() */
pipein_fp = popen("ls", "r");
if (pipein_fp== NULL)
{
perror("popen");
exit(1);
}
/* Create one way pipe line with call to popen() */
pipeout_fp = popen("sort", "w“);
if (pipeout_fp == NULL)
{
perror("popen");
exit(1);
}
/* Processing loop */
while(fgets(readbuf, 80, pipein_fp))
fputs(readbuf, pipeout_fp);
/* Close the pipes */
pclose(pipein_fp);
pclose(pipeout_fp);
return(0); }](https://image.slidesharecdn.com/uspnotes-unit6-8-160505161037/85/Usp-notes-unit6-8-79-320.jpg)
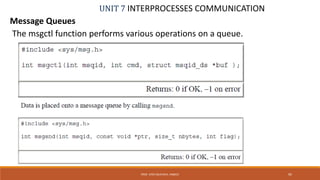
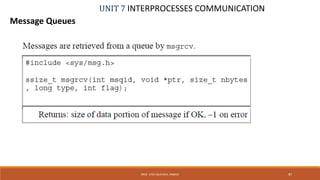
![UNIT 7 INTERPROCESSES COMMUNICATION
Message Queues
PROF. SYED MUSTAFA, HKBKCE 96
Each message is composed of a positive long integer type field, a non-negative length
(nbytes), and the actual data bytes (corresponding to the length).
Messages are always placed at the end of the queue.
The ptr argument points to a long integer that contains the positive integer message
type, and it is immediately followed by the message data.
There is no message data if nbytes is 0. If the largest message we send is 512 bytes, we
can define the following structure:
struct mymesg {
long mtype; /* positive message type */
char mtext[512]; /* message data, of length nbytes */
};
The ptr argument is then a pointer to a mymesg structure.
The message type can be used by the receiver to fetch messages in an order other than
first in, first out.](https://image.slidesharecdn.com/uspnotes-unit6-8-160505161037/85/Usp-notes-unit6-8-96-320.jpg)
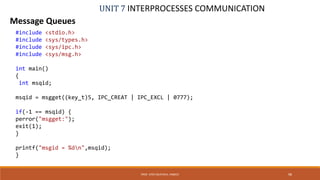
![UNIT 7 INTERPROCESSES COMMUNICATION
Message Queues
PROF. SYED MUSTAFA, HKBKCE 99
#include <sys/types.h>
#include <sys/ipc.h>
#include <sys/msg.h>
struct msgbuf{
long mtype;
char mtext[40];
};
int main()
{
int msqid, len, ret;
struct msgbuf msgsend={0,"0"};
msqid = msgget((key_t)5, IPC_CREAT | 0666);
if(-1 == msqid){
perror("msgget:");
exit(1);
}
printf("Enter message type: n");
scanf("%d",&msgsend.mtype);
printf("Enter message textn");
//make use of fgets() if u want to send msg with spaces
scanf("%s", msgsend.mtext);
len = strlen(msgsend.mtext);
ret = msgsnd(msqid, &msgsend, len, 0);
if(-1 == ret)
{
perror("msgsnd:");
exit(1);
}
else
printf("message sentn");
}](https://image.slidesharecdn.com/uspnotes-unit6-8-160505161037/85/Usp-notes-unit6-8-99-320.jpg)
![UNIT 7 INTERPROCESSES COMMUNICATION
Message Queues
PROF. SYED MUSTAFA, HKBKCE 100
#include <sys/types.h>
#include <sys/ipc.h>
#include <sys/msg.h>
struct msgbuf{
long mtype;
char mtext[40];
};
main()
{
int msqid, len, ret, type;
struct msgbuf msgread={0, "0"};
fflush(stdin);
msqid = msgget((key_t)5,0);
if(-1 == msqid)
{
perror("msgget:");
exit(1);
}
printf("Enter the message no:n");
scanf("%d", &type);
len = sizeof(msgread.mtext);
ret = msgrcv(msqid, &msgread, len, type, IPC_NOWAIT );
printf("ret = %dn", ret);
if(-1 == ret){
perror("msgrcv:");
exit(1);
}
else
printf("message type = %d message text = %sn",
msgread.mtype, msgread.mtext);
}](https://image.slidesharecdn.com/uspnotes-unit6-8-160505161037/85/Usp-notes-unit6-8-100-320.jpg)

The document discusses signals and daemon processes in Unix system programming. It covers: 1) Signals are software interrupts that allow processes to handle asynchronous events. Processes can accept default signal actions, ignore signals, or catch signals using user-defined handlers. 2) Common signals include SIGINT, SIGTERM, SIGKILL. The signal() function allows processes to set handlers for signals. 3) Daemons are long-running background processes that handle system services. Daemons detach from the controlling terminal and session.