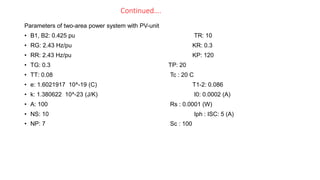
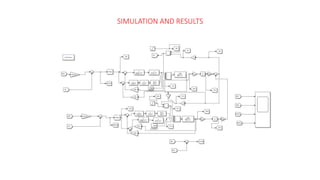
This document presents a study on load frequency control (LFC) for a two-area interconnected power system incorporating a photovoltaic solar power plant. The proposed PID controller achieves improved performance with low overshoot and short settling time, as validated through MATLAB-Simulink simulations. The results indicate beneficial operating characteristics for systems that utilize solar power, suggesting the PID controller's effectiveness in maintaining frequency stability.