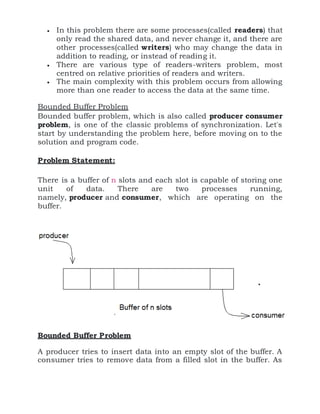
The document discusses three classic synchronization problems: the bounded buffer problem, dining philosophers problem, and readers-writers problem. For the bounded buffer problem, it describes the producer-consumer scenario and provides pseudocode for the producer and consumer using semaphores. For the dining philosophers problem, it outlines the scenario of philosophers sharing a limited number of chopsticks and presents a solution using semaphores. For the readers-writers problem, it describes the scenario of multiple readers and a single writer accessing a shared resource and provides pseudocode for readers and writers that uses semaphores and a lock to control access.






![starts eating, he has to stop at some point of time. The philosopher
is in an endless cycle of thinking and eating.
An array of five semaphores, stick[5], for each of the five chopsticks.
The code for each philosopher looks like:
while(TRUE)
{
wait(stick[i]);
/*
mod is used because if i=5, next
chopstick is 1 (dining table is circular)
*/
wait(stick[(i+1) % 5]);
/* eat */
signal(stick[i]);
signal(stick[(i+1) % 5]);
/* think */
}
Copy](https://image.slidesharecdn.com/unitiiiprocesssynchronization-220923035907-4eb33c37/85/UNIT-III-Process-Synchronization-docx-10-320.jpg)