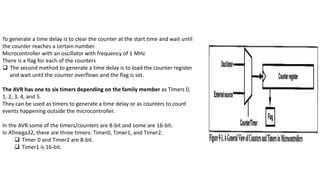
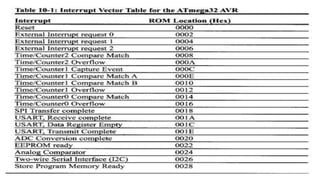
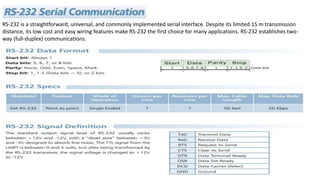
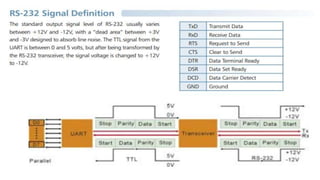
The document discusses timers and interrupts in microcontrollers. It explains that timers can be used to generate time delays by clearing a counter at the start time and waiting for it to reach a certain number. Microcontrollers have multiple timers of different bit sizes that can be used for time delays or event counting. Interrupts temporarily suspend the main program to allow an interrupt service routine to execute, then return to the main program. Sources of interrupts include timers, external pins, serial communication, and analog-to-digital conversion. RS-232 is a common serial interface standard.