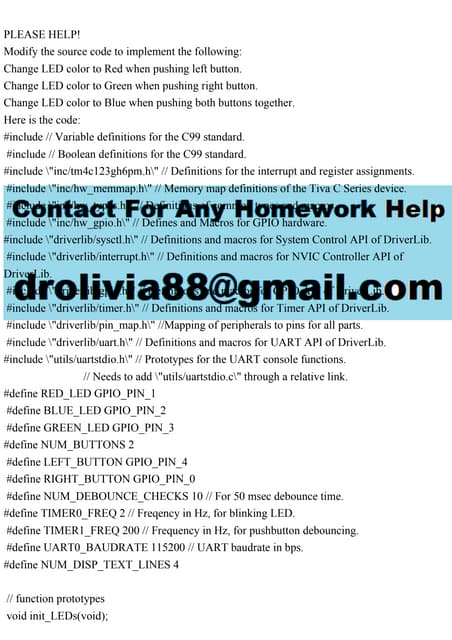
This document summarizes code for a digital signal processing lab that uses a Tiva C Series microcontroller. The code includes header files for variable definitions, Boolean definitions, and APIs for the microcontroller, memory map, common types, and peripherals like system control, GPIO, and timers. Functions are declared to initialize LEDs and a timer. The timer is configured to generate interrupts at different frequencies by changing the TIMER0_FREQ definition, and an interrupt service routine toggles the LEDs.
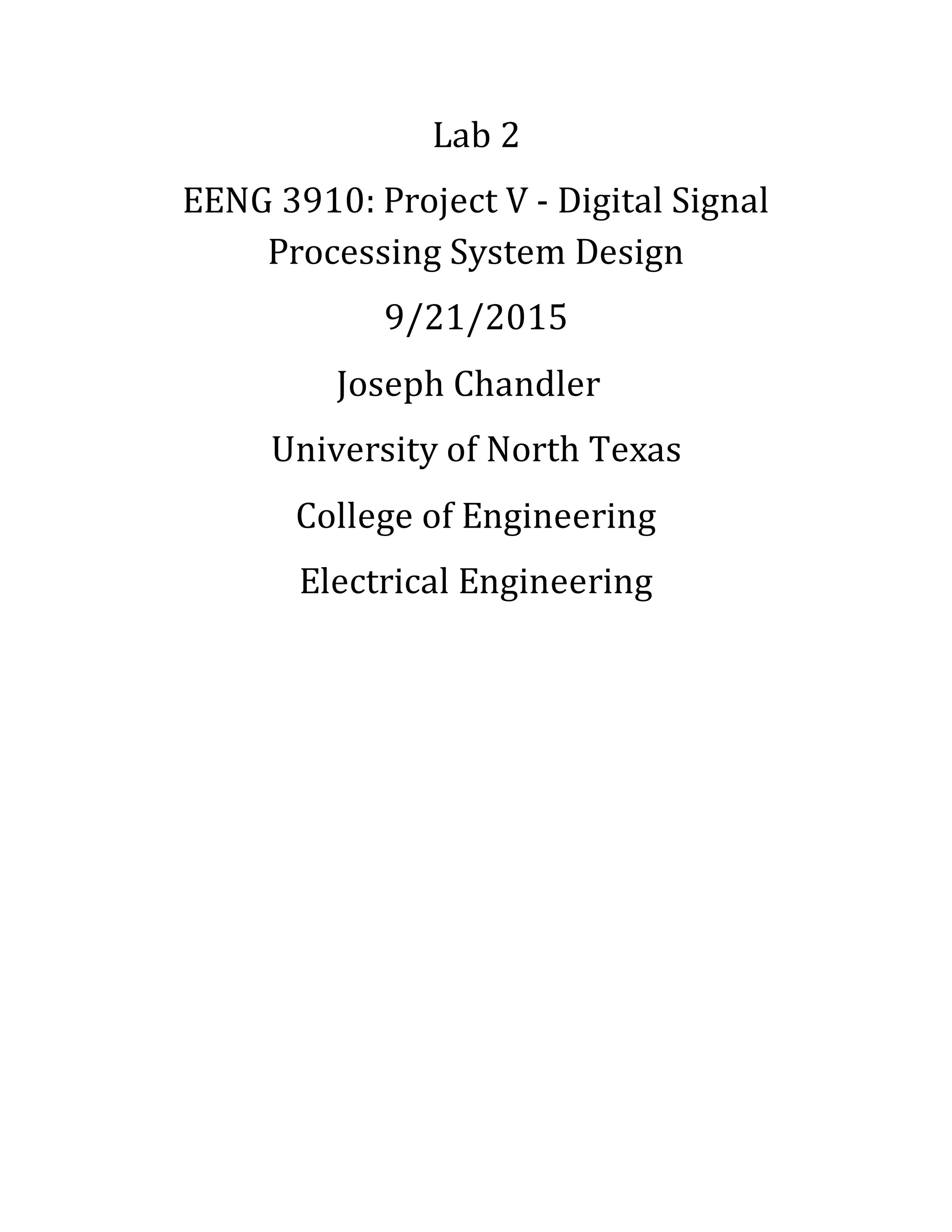










![Createsan unsigned32-bitglobal variable forthe systemclock.
const char *disp_text[NUM_DISP_TEXT_LINE] = {
"n",
"UART and LED Demon",
"H: help, R: red, G: green, B: blue.n",
"> " };
Thisline createsa pointer fora systemmessage communicatedtothe userviaputtyconsole..
int main(void){
The main processcallsandacts on variables,macros,definitions,andothersystem functions.
uint32_t i;
Createsan unsigned32-bitvariable forloops.
unsigned char user_cmd;
Createsan unsignedcharactervariable foruserinput.
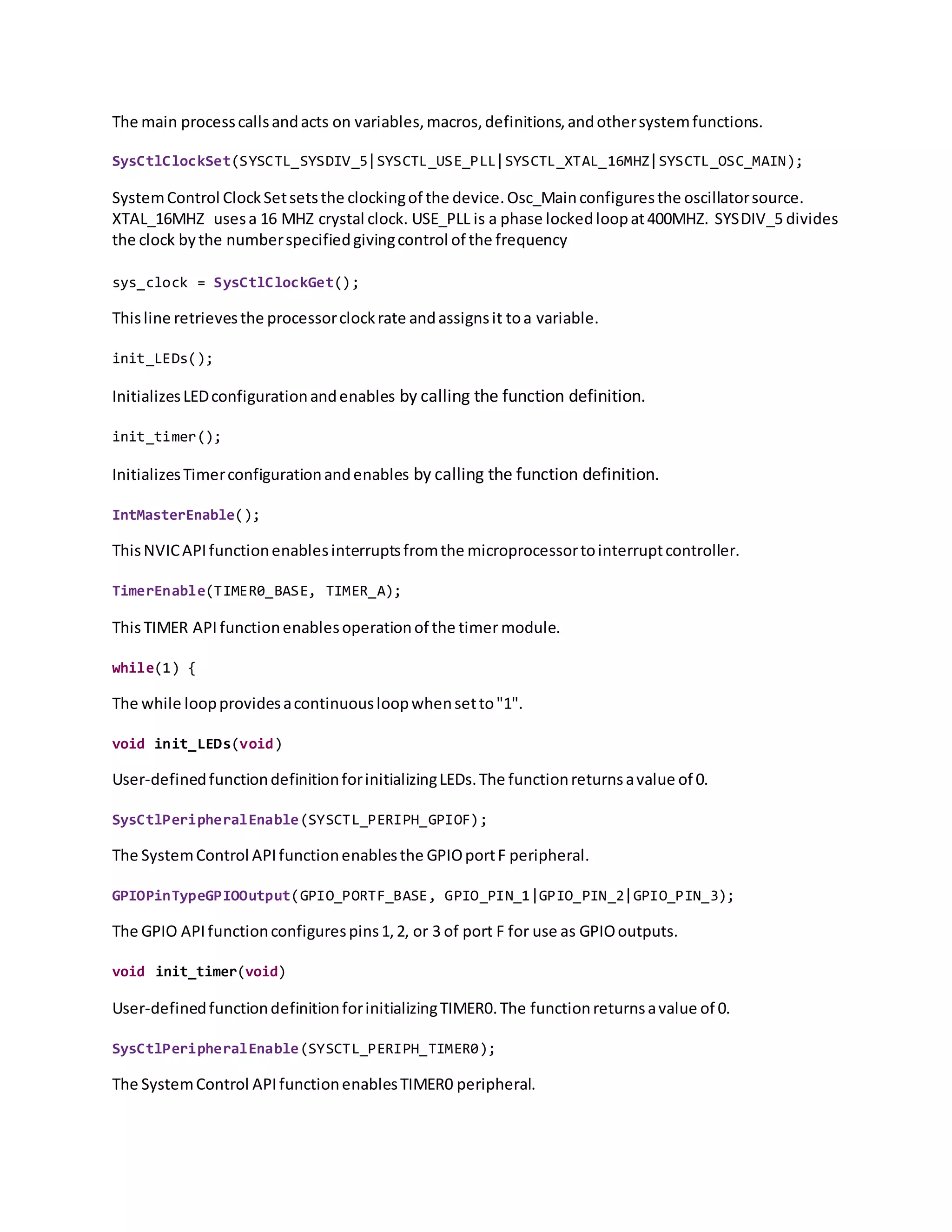
SysCtlClockSet(SYSCTL_SYSDIV_5|SYSCTL_USE_PLL|SYSCTL_XTAL_16MHZ|SYSCTL_OSC_MAIN);
SystemControl Clock Setsetsthe clockingof the device.Osc_Mainconfiguresthe oscillatorsource.
XTAL_16MHZ usesa 16 MHZ crystal clock. USE_PLL is a phase lockedloopat400MHZ. SYSDIV_5 divides
the clock bythe numberspecifiedgivingcontrol of the frequency.
sys_clock = SysCtlClockGet();
Thisline retrievesthe processorclockrate andassignsit toa variable.
init_LEDs();
InitializesLEDconfigurationandenables by calling the function definition.
init_UART();
InitializesUARTconfigurationandenables by calling the function definition.
init_timer();
InitializesTimerconfigurationandenables by calling the function definition.
IntMasterEnable();
ThisNVICAPIfunctionenablesinterruptsfromthe microprocessortointerruptcontroller.
TimerEnable(TIMER0_BASE, TIMER_A);
ThisTIMER API functionenablesoperationof the timer module.](https://image.slidesharecdn.com/a3855595-e82c-4726-87a5-b078d2f74986-160525080646/75/DSP_Assign_2-Autosaved-18-2048.jpg)
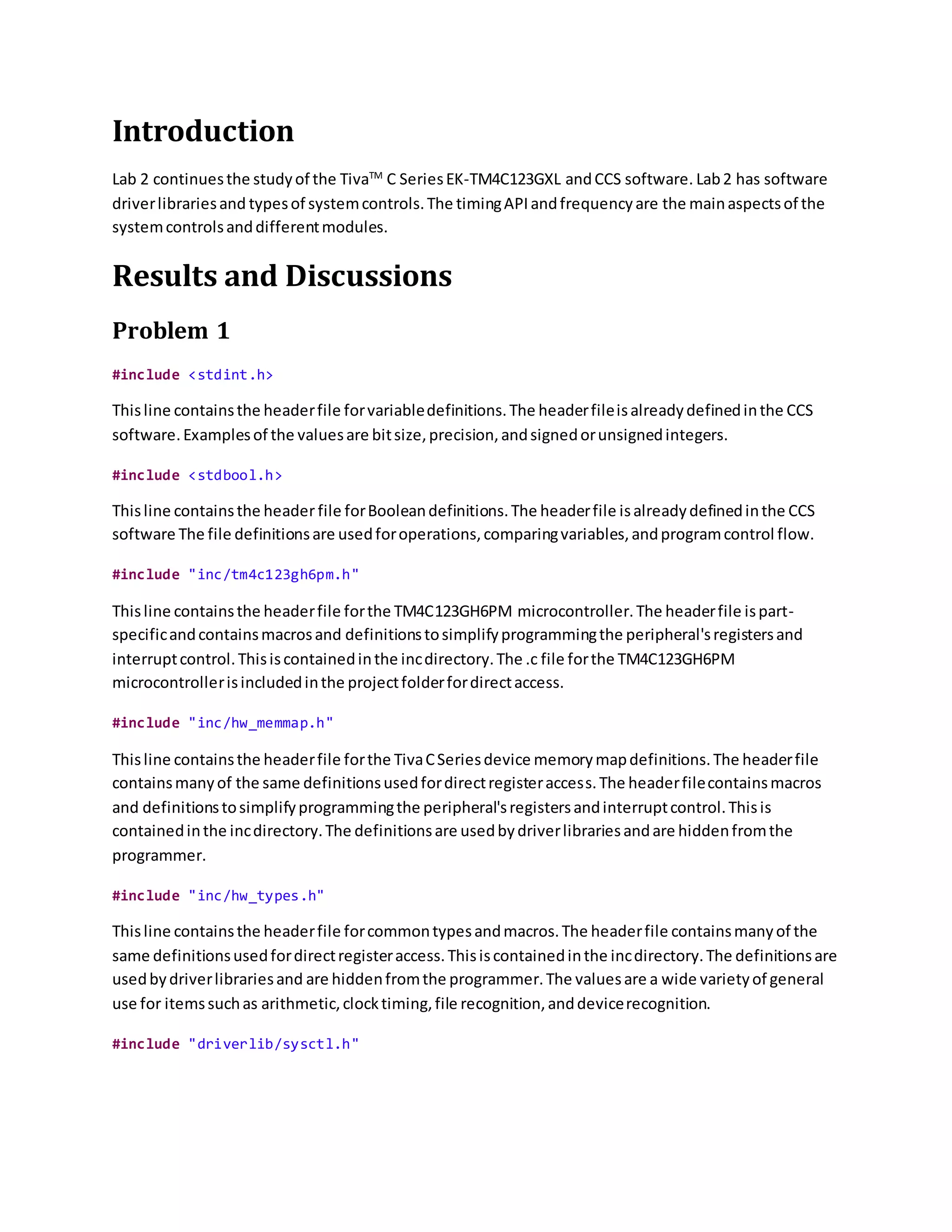
![for(i=0; i<NUM_DISP_TEXT_LINE; i++)
Thisline isa for loopto displayprogrammessage onconsole.
UARTprintf(disp_text[i]);
Thisfunctionprintsthe message onthe console.
while(1) {
The while loopprovidesacontinuousloopwhensetto"1".
if(UARTRxBytesAvail())
If the UART has available userinput.
user_cmd = UARTgetc();
Thisline retrievesthe userinputandstoresitina variable.
else
user_cmd = 0;
Else,the usercommandvariable issetto 0.
switch(user_cmd){
Switchcase for the userinputdata.
case 'r':
Switchcase for red.
case ' ':
Switchcase for empty.
case 'H':
Switchcase for H.
case 'h':
Switchcase for h.
for(i=0; i<NUM_DISP_TEXT_LINE; i++)
Switchcase displayforlines87-90 is a for looptodisplayconsole message touser viaputty console.
UARTprintf(disp_text[i]);](https://image.slidesharecdn.com/a3855595-e82c-4726-87a5-b078d2f74986-160525080646/75/DSP_Assign_2-Autosaved-19-2048.jpg)









![[嵌入式系統] MCS-51 實驗 - 使用 IAR (3)](https://cdn.slidesharecdn.com/ss_thumbnails/mcs51iarpart3-150613071723-lva1-app6892-thumbnail.jpg?width=640&height=640&fit=bounds)









![[ZigBee 嵌入式系統] ZigBee 應用實作 - 使用 TI Z-Stack Firmware](https://cdn.slidesharecdn.com/ss_thumbnails/zigbeeappimplementation-150613072040-lva1-app6891-thumbnail.jpg?width=640&height=640&fit=bounds)




![[嵌入式系統] MCS-51 實驗 - 使用 IAR (2)](https://cdn.slidesharecdn.com/ss_thumbnails/mcs51iarpart2-150613071717-lva1-app6891-thumbnail.jpg?width=640&height=640&fit=bounds)