True Differential S-Parameter Measurements
•
8 likes•13,345 views

Differential structures such as backplanes and cables are the primary means for transmitting high speed serial data signals. Signal integrity of these systems is determined by the characteristics of the media such as insertion loss, crosstalk, and differential to common mode conversion. Complete measurement of the mixed mode s-parameters is often performed by transforming single-ended s-parameters and assuming that the system is linear. In some cases, linearity cannot be assumed such as where active components are used. This presentation describes how to measure true differential s-parameters which can be measured even in the presence of non-linear elements.

Recommended
More Related Content
What's hot
What's hot (20)
Viewers also liked
Viewers also liked (20)
More from Rohde & Schwarz North America
More from Rohde & Schwarz North America (20)
True Differential S-Parameter Measurements
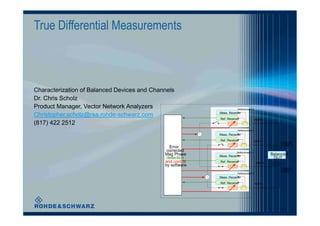
- 1. True Differential Measurements Characterization of Balanced Devices and Channels Dr. Chris Scholz Product Manager, Vector Network Analyzers Reflectometer 2 Christopher.scholz@rsa.rohde-schwarz.com Meas. Receiver Ref. Receiver PORT 2 (817) 422 2512 Reflectometer 4 Meas. Receiver Ref. Receiver PORT 4 Logical Error PORT 2 corrected Reflectometer 1 Mag Phase Meas. Receiver Balanced detection DUT and control Ref. Receiver PORT 1 by software Logical PORT 1 Reflectometer 3 Meas. Receiver Ref. Receiver PORT 3
- 2. Outline Reflectometer 2 Meas. Receiver Ref. Receiver PORT 2 Reflectometer 4 Meas. Receiver Ref. Receiver ı Introduction to Signal Integrity PORT 4 Logical Error PORT 2 corrected Reflectometer 1 Mag Phase Balanced Timing detection Meas. Receiver DUT and control Ref. Receiver Signal Quality PORT 1 by software Logical ı Balanced Architectures Reflectometer 3 PORT 1 Meas. Receiver The need for balanced architectures Ref. Receiver PORT 3 Ideal vs. non-ideal devices ı Measurement Techniques for Balanced Architectures Single mode vs. Differential Mode Mixed mode S-Parameters Trc18 Sdd21 dB Mag 0.5 dB / Ref -23 dB Ch1 Cal int Trc21 Sdd21 dB Mag 0.5 dB / Ref -23 dB Ch2 Cal int 2 of 16 (Max) TureDifferential vs. Virtual Differential Sdd21 -20.0 TruDifferential Vector Network Analyzer -20.5 ı Experimental Examples -21.0 -21.5 -22.0 -22.5 -23.0 -23.5 -24.0 Ch1 Start -25 dBm — Freq 1 GHz Stop 0 dBm 1/29/2013 Ch2 Start -28 dBm — 2 Freq 1 GHz Stop -3 dBm 3/8/2007, 1:10 PM
- 3. Introduction – Signal Integrity ı What is Signal Integrity? Signal integrity or SI is a set of measures of the quality of an electrical signal. If the PCB or package already exists, the designer can also measure the impairment presented by the connection using high speed instrumentation such as a vector network analyzer. For example, IEEE P802.3ap Task Force uses measured S-parameters as test cases[9] for proposed solutions to the problem of 10 Gbit/s Ethernet over backplanes. (Source: Wikipedia, last accessed 01/29/2013) ı Two Key Aspects of SI: Timing Signal Quality 1/29/2013 3
- 4. Introduction – Signal Integrity ı Timing Jitter RJ, DJ, SJ, PJ, DDJ, DCD, ISI, etc. interconnect flight time vs bit period chip-to-chip vs on-chip packaging 1/29/2013 4
- 5. Introduction - Signal Integrity ı Signal Quality Noise = (S+N)-S Ringing 10 Cross talk 8 Distortion 6 Ground Bounce 4 amplitude Ground Noise 2 Signal Loss 0 Power Supply Noise -2 -4 -6 time 1/29/2013 5
- 6. Introduction – Signal Integrity ı Reflection Noise Caused by impedance mismatch, vias, interconnect discontinuities ı Crosstalk Noise Caused by electromagnetic coupling between traces and vias ı Power and Ground Noise Caused switching noise of the power and ground delivery systems ı EMC/EMI Susceptibility 1/29/2013 6
- 7. Balanced Architectures 1/29/2013 7
- 8. Differential Signaling Unbalanced Device/Channel Balanced (differential) Device/Channel c a 2 1 1 2 b d • Signals referring to ground ı Signals with equal amplitude but 180° phase shift • Also supports a common-mode (in-phase) signal • Virtual ground
- 9. Balanced devices - Why balanced design? ı Advantages: ı High noise immunity Minimizes Power and ground plane noise Minimizes EMI susceptibility Minimizes Cross talk Components with balanced design: ı Low radiated noise ı High integration density • Amplifiers ı Lower power • Mixers consumption • Filters (e.g. SAW filters) • PCB layout in mobile phones • LAN adapters, converters, filters • PC components (HDD control, etc) • Almost all signals high-speed serial data signals
- 10. Ideal Balanced Device Characteristics Gain = 1 Differential-mode signal Fully balanced Common-mode signal (EMI or ground noise) Gain = 1 Differential-mode signal Balanced to single ended Common-mode signal (EMI or ground noise) Ideally, balanced devices transmit differential and reject common-mode signals 1/29/2013 10
- 11. Non-Ideal Balanced Device Characteristics Differential to common- ı Non-ideal balanced devices convert modes mode conversion + Generates EMI Susceptible to EMI Common-mode to differential conversion 1/29/2013 11
- 12. Non-Ideal Balanced Device Characteristics ı Non-ideal balanced devices convert input modes Differential to common- mode conversion Common-mode to differential conversion 1/29/2013 12
- 13. Measurement Techniques for Balanced Devices 1/29/2013 13
- 14. Parameters to Test for a Balanced Device ı Performance in pure differential mode ı Performance in pure common mode ı Conversion from differential mode to common mode (in both directions) ı Conversion from common mode to differential mode (in both directions) 1/29/2013 14
- 15. Balanced Devices Characteristics ı Real Devices Propagation of both common mode and differential mode signals Mode conversion due to non-symmetric design Susceptability of noise (mainly common mode) Detailed insight of differential/common mode response required ı Description of balanced devices via special type of S-Parameters: Mixed-Mode S-Parameters 1/29/2013 15
- 16. Challenge when measuring balanced devices ı Network analyzers are unbalanced ı Classic Network Analyzers are 2-port instruments ı No balanced calibration standards ı No standard reference impedance (Z0) for balanced device ı Characterization of common and differential transmission model 1/29/2013 16
- 17. Measurement with Physical BalUns Measurement with differential mode signals at a balanced device Unbalanced network analyzer DUT Balun 1/29/2013 17
- 18. Measurement with Physical Transformers Measurement with common Unbalanced mode signals at a balanced network analyzer device DUT 1/29/2013 18
- 19. Balanced Device Characteristics Balun setup for Mixed-Mode-Characterization bal DUT bal unbal unbal Each 2-port combination between balanced and unbalanced ports is necessary for complete mixed mode characterization.
- 20. Balanced Device Characteristics Physical BalUns: Disadvantages ı Calibration plane different from desired measurement plane ı Degradation of measurement accuracy due to poor RF performance ı Different configurations for different modes necessary (e.g. differential to common-mode conversion) ı Limited in frequency range ı Solution: Us ideal (virtual) transformer to characterize mixed mode S-parameters of the DUT using virtual, ideal transformers Modal Decomposition Method Use True Differential Method 1/29/2013 20
- 21. Basic Architecture: Definition of Differential Measuremets Measurement Principle ı VirDi = Virtual differential Mode Characterization of balanced DUT as single ended DUT with mathematical calculation of mixed-mode S-Parameters form single ended S-Parameters ı TruDi = True differential Mode Stimulation of DUT with true differential and common mode signals with calculation of mixed-mode S-Parameters from error corrected mixed mode wave quantities 1/29/2013 21
- 22. Virtual Differential Measurement ı Subsequent single ended measurements with post processing using linear superposition ı Applicable for all passive devices and active devices operating in their linear region ı Large deviations compared to TruDi in large signal operation, especially in terms of compression curve characteristics Nonlinear behavior of the DUT forbids linear superposition 1/29/2013 22
- 23. True Differential Measurement ı The DUT is stimulated using a real differential mode or real common mode signal ı Better accuracy in small signal operation ı Accurately measure compression under large signal operation 1/29/2013 23
- 24. ZVA – True Differential Mode ı Coherent sources Generation of true differential and common mode stimulus signals At least one signal output can be adjusted in amplitude and phase with respect to the other ı Simultaneous measurement of two reference signals (a waves) and two measurement signals (b waves) ı Four-port calibration in the reference plane Vector-corrected measurement of a single ended waves or voltages (a and b waves) ı Calculation of true differential S-Parameters from vector corrected wave quantities 1/29/2013 24
- 25. A True Differential Network Analyzer Reflectometer 2 Meas. Receiver Ref. Receiver PORT 2 Reflectometer 4 Meas. Receiver Ref. Receiver PORT 4 Logical PORT 2 Error corrected Reflectometer 1 Mag Phase Balanced Meas. Receiver detection DUT and control Ref. Receiver PORT 1 by software Logical PORT 1 Reflectometer 3 Meas. Receiver Ref. Receiver PORT 3 1/29/2013 25
- 26. True Differential Measurements with R&S Network Analyzers ZVA and ZVT 1/29/2013 26
- 27. Sweep modes (R&S®ZVA-K6) differential mode 180° common mode 0° Coherent signals of arbitrary phase and amplitude imbalance are possible Sweep Modes: Frequency Phase (Phase of the stimulating signal can be swept from 0° to 180° ) Magnitude (Variation of the relative magnitude of the differential signals) “Classical” calibration techniques sufficient (full two port) Investigation of the DUT under real conditions 1/29/2013 27
- 28. Typical measurements quality parameters ı Differential and common mode insertion loss ı Differential and common mode return loss ı NEXT-Measurements (Near End Crosstalk) ı FEXT-Measurements (Far End Crosstalk) ı Amplitude-Imbalance ı Phase-Imbalance ı Common-Mode Rejection Ratio (CMRR) 1/29/2013 28
- 29. True Differential vs. Virtual Differential TruDi vs. VerDi 1/29/2013 29
- 30. Modal Decomposition Method Principle 4-port device with Description of virtual 16 measured ideal transformers unbalanced S- parameter Calculated mixed mode S-parameters ı Calculation of the mixed mode S-parameters using unbalaced S-Parameters and virtual transformers 1/29/2013 30
- 31. Modal Decomposition Method test fixture a Port 1 Port 3 a DUT DUT b b Port 2 Port 4 a 1 S 11 S 12 S 13 S 14 b 4 a 2 S 2 1 S 22 S 23 S 24 b 3 a S S S S b 3 31 32 33 34 2 a 4 S 4 1 S 42 S 43 S 44 b 1 ı Measure the balanced 2-port device as unbalanced 4-port device with unbalanced VNA 1/29/2013 31
- 32. Solution: Modal Decomposition Method [Z] [P], [Q] [Zm] ı Calculate the mixed mode Zm-parameters of the combination of DUT with transformers. 1/29/2013 32
- 33. Port Configurations Mixed Mode DUT ı Physical single ending ports logical balanced ports Port 3 Port 1 Port 4 Port 2 physical ports DUT logical ports Port 1 Port 2 ı Different impedances for common-mode and differential-mode differential-mode (ideally matched) 100 ( =2*Z0 ) common-mode (ideally matched) 25 ( = 1/2*Z0 ) 1/29/2013 33
- 34. Modal Decomposition Method Mixed Mode S-Parameter Matrix DU Differential-Mode stimulus Common-Mode stimulus T Port 1 Port 2 Port 1 Port 2 Logical Port 1 Logical Port 2 Differential- Port 1 S dd11 S d d1 2 S dc11 S dc12 mode Port 2 S S dd 22 S dc 21 S d c 22 Response dd 21 Common- Port 1 S cd11 S cd12 S cc1 1 S cc12 mode Port 2 Response S cd 21 S cd 22 S cc 21 S cc 22 Naming Convention: S mode res., mode stim., port res., port stim. 1/29/2013 34
- 35. Mixed Mode S-Matrix: DD Quadrant input reflection reverse transmission S dd 11 S dd 12 S dc 11 S dc 12 S dd 21 S dd 22 S dc 21 S dc 22 S cd 11 S cd 12 S cc 11 S cc 12 S cd 21 S cd 22 S cc 21 S cc 22 forward transmission output reflection ı Describes fundamental performance in pure differential-mode operation 1/29/2013 35
- 36. Mixed Mode S-Matrix: CC Quadrant input reflection reverse transmission S dd 11 S dd 12 S dc 11 S dc 12 S dd 21 S dd 22 S dc 21 S dc 22 S cd 11 S cd 12 S cc 11 S cc 12 S cd 21 S cd 22 S cc 21 S cc 22 forward transmission output reflection ı Describes fundamental performance in pure common-mode operation 1/29/2013 36
- 37. Mixed Mode S-Matrix: DC Quadrant input reflection reverse transmission S dd 11 S dd 12 S dc 11 S dc 12 S dd 21 S dd 22 S dc 21 S dc 22 S cd 11 S cd 12 S cc 11 S cc 12 S cd 21 S cd 22 S cc 21 S cc 22 forward transmission output reflection ı Describes conversion of a common-mode stimulus to a differential-mode response ı Terms are ideally equal to zero with perfect symmetry ı Related to the generation to EMI 1/29/2013 37
- 38. Mixed Mode S-Matrix: CD Quadrant input reflection reverse transmission S dd 11 S dd 12 S dc 11 S dc 12 S dd 21 S dd 22 S dc 21 S dc 22 S cd 11 S cd 12 S cc 11 S cc 12 S cd 21 S cd 22 S cc 21 S cc 22 forward transmission output reflection ı Describes conversion of a differential-mode stimulus to a common-mode response ı Terms are ideally equal to zero with perfect symmetry ı Related to the susceptibility of EMI 1/29/2013 38
- 39. 3-Port device single ended common / differential-mode Single-ended differential-mode common-mode Port 1 Port 2 (unbalanced) DUT (balanced) Single Diff.- Com.- Ended mode mode Stim. Stim. Stim. Port 1 Port 2 Port 2 Single-ended Response Port 1 Sss11 Ssd12 Ssc12 S Sdc22 ds21 Sdd22 Differential - Port 2 Mode Response common-mode Port 2 Scs 21 Scd 22 Scc22 Response 1/29/2013 39
- 40. Measurement Examples: TrueDi vs. VirDi 1/29/2013 40
- 41. Instrument Control of TruDi 1. Apply full n-port calibration, e.g. with CalUnit 2. Configure balanced Measurement 3. Switch to True differential Mode 1/29/2013 41
- 42. Special Features of TruDi ı Simultaneous display of VirDi and TruDi S-Parameters ı Same “calibration” for VirDi and TruDi ı Measurement of error corrected S-Parameters and wave quantities (measure diff/comm power with diff/comm stimulation) ı Phase imbalance sweep P, f : fixed (max) = -180° to +180° ı Magnitude imbalance sweep f : fixed P(max) = -10 dB to + 10 dBm (max)
- 43. ZVA Coherent Sources ı Coherence Mode allows to set an arbitrary phase and amplitude between the R&S®ZVA’s signals sources ı R&S®ZVA-K6 True Differential Option ı Applications: Modulators Antenna beam forming ı Realtime measurement ı In R&S®ZVA67 four individual phase shifts
- 44. Example 1: Tunable Active Filter Trc18 Sdd21 dB Mag 0.5 dB / Ref -23 dB Ch1 Cal int 2 of 16 (Max) Trc21 Sdd21 dB Mag 0.5 dB / Ref -23 dB Ch2 Cal int Sdd21 -20.0 -20.5 -21.0 Gain compression -21.5 true differential -22.0 -22.5 -23.0 virtual differential -23.5 -24.0 Ch1 Start -25 dBm — Freq 1 GHz Stop 0 dBm Ch2 Start -28 dBm — Freq 1 GHz Stop -3 dBm 3/8/2007, 1:10 PM True differential power axis has been shifted by -3 dB to equalize voltage amplitudes 1/29/2013 44
- 45. Tunable Active Filter Trc18 Sdd21 dB Mag 2 dB / Ref -10 dB Ch1 Cal 2 of 16 (Max) Trc21 Sdd21 dB Mag 2 dB / Ref -10 dB Ch2 Cal int Sdd21 -2 -4 Trc18 Sdd21 dB Mag 2 dB / Ref -10 dB Ch1 Cal 2 of 16 (Max) Trc21 Sdd21 dB Mag 2 dB / Ref -10 dB Ch2 Cal int -6 Sdd21 -8 -2 -10 -4 -12 -6 -14 -8 -16 -10 -18 -12 -14 Ch1 Start 10 MHz — Pwr -20 dBm Stop 2 GHz Ch2 Start 10 MHz — Pwr -23 dBm Stop -16 2 GHz 3/8/2007, 1:20 PM -18 Ch1 Start 10 MHz — Pwr -10 dBm Stop 2 GHz Ch2 Start 10 MHz — Pwr -13 dBm Stop 2 GHz 3/8/2007, 1:19 PM • No difference between modes at low power (left), • Higher gain for true mode at high power (right) 1/29/2013 45
- 46. S-Parameters vs. Input Power Trc18 Sdd21 dB Mag 5 dB / Ref 0 dB Ca? 1 Trc19 Sdd21 dB Mag 5 dB / Ref 0 dB Cal int 2 Mkr 2 Sdd21 20 Mkr 1 6.96 dBm -4.893 dB Mkr Sdd21 2 20 Mkr 1 6.96 dBm -0.571 dB Mkr 2 -29.76 dBm 16.145 dB Mkr 2 -29.76 dBm 16.577 dB 10 10 Mkr 1 0 Mkr 1 0 -10 -10 -20 -20 Ch3 Start -30 dBm Freq 1 GHz Stop 11 dBm Ch4 Start -30 dBm Freq 1 GHz Stop 11 dBm Trc20 Scd21 dB Mag 5 dB / Ref -5 dB Ca? 3 Trc21 Scd21 dB Mag 5 dB / Ref -5 dB Cal int 4 Mkr Scd21 215 •Mkr 1 6.96 dBm -16.735 dB Mkr Scd21 215 Mkr 1 6.96 dBm -12.183 dB Mkr 2 -29.76 dBm 6.742 dB Mkr 2 -29.76 dBm 7.575 dB 5 5 -5 -5 Mkr 1 Mkr 1 -15 -15 -25 -25 Ch3 Start -30 dBm Freq 1 GHz Stop 11 dBm Ch4 Start -30 dBm Freq 1 GHz Stop 11 dBm Trc22 Scc21 dB Mag 1 dB / Ref -9 dB Ca? 5 Trc23 Scc21 dB Mag 1 dB / Ref -9 dB Cal int 6 Scc21 -5 Mkr 1 6.96 dBm -6.733 dB Scc21 -5 Mkr 1 6.96 dBm -8.351 dB Mkr 1 Mkr 2 -29.76 dBm -9.186 dB Mkr 2 -29.76 dBm -8.244 dB -7 Mkr 2 -7 Mkr 1 Mkr 2 -9 -9 -11 -11 -13 -13 Ch3 Start -30 dBm Freq 1 GHz Stop 11 dBm Ch4 Start -30 dBm Freq 1 GHz Stop 11 dBm virtual differential mode true differential mode 1/29/2013 46
- 47. Phase Imbalance Sweep Trc11 Sdd21 dB Mag 1 dB / Ref -5 dB Cal int 5 of 3 (Max) Trc12 ac1 dB Mag 10 dB / Ref 0 dBm Cal int Trc13 ad1 dB Mag 10 dB / Ref 0 dBm Cal int ad1 Mkr 1 0.000000 ° -2.339 dB Mkr 1 0.000000 ° -57.751 dBm 10 0 Mkr 1 -10 -20 -30 -40 -50 Mkr 1 -60 -70 Ch7 Phas Imb Start -180° Freq 1 GHz Pwr 0 dBm Stop 180° 1/29/2013 47
- 48. Phase & Magnitude Imbalance Sweep Trc1 Sdd21 dB Mag 1 dB / Ref 10 dB Ch1 Cal int 1 of 1 (Max) Trc2 Sdd21 dB Mag 1 dB / Ref 10 dB Ch2 Cal int Trc3 bd2 dB Mag 0.5 dB / Ref 3 dBm Ch1 Cal int Sdd21 15 14 13 12 11 10 9 8 7 Ch1 Ampl Imb Start -10 dB — —Freq 1 GHz Pwr -10 dBm Stop 10 dB Ch2 Phas Imb Start -180° — Freq 1 GHz Pwr -10 dBm Stop 180° 1/23/2007, 4:54 PM 1/29/2013 48
- 49. Theoretical Verification ı Approach: A model based analysis Analytical calculations using MATLAB Experimental Verification Measurements ı DUT The most simple bipolar differential amplifier
- 50. Modeling the DUT ı The two inputs / outputs can be regarded as common / differential inputs and outputs Gain of the individual amplifier Compression and 3rd order intermodulation Sdd 21 ı a1 & afb determine the CMRR CMRR ratio between differential mode and common mode voltage gain Scc 21 1/29/2013 50
- 51. Modeling the DUT ı Feedback factor afb 1/29/2013 51
- 52. Modeling the DUT ı Does not include a shared feed back (CMRR 0) ı A system of two independent, ideally identical single-ended amplifiers ı VirDi leads to underestimation! Input referred 1-dB compression point 1/29/2013 52
- 53. TruDi « VirDi ideal differential pair I current sourced differential pair (CMRR ®∞) I VirDi leads to overestimation! 1/29/2013 53
- 54. Experimental Verification: Amplifier Test Circuit RE = 0 CMRR 0dB RE = 27W CMRR 16dB 1/29/2013 54
- 55. Experimental Verification 1/29/2013 55
- 56. Experimental Verification: Measurement Results 2,4dB 16dB 1/29/2013 56
- 57. Experimental Verification: Low CMRR Trc1 Sdd21 dB Mag 10 dB / Ref 0 dB Ch1 Cal 1 of 1 (Max) Trc2 Scc21 dB Mag 10 dB / Ref 0 dB Ch2 Cal Sdd21 • M 1 600.00000 MHz 9.1983 dB 40 M 1 600.00000 MHz 3.8022 dB 30 20 M1 10 M1 0 -10 -20 -30 -40 Ch1 TrD Start 10 MHz — Pwr -25 dBm Stop 2 GHz Ch2 TrD Start 10 MHz — Pwr -25 dBm Stop 2 GHz 1/29/2013 57
- 58. Experimental Verification: High CMRR Trc1 Sdd21 dB Mag 10 dB / Ref 0 dB Ch1 Cal 1 of 1 (Max) Trc2 Scc21 dB Mag 10 dB / Ref 0 dB Ch2 Cal Sdd21 • M 1 600.00000 MHz 9.2649 dB 40 M 1 600.00000 MHz -26.255 dB 30 20 M1 10 0 -10 -20 M1 -30 -40 Ch1 TrD Start 10 MHz — Pwr -25 dBm Stop 2 GHz Ch2 TrD Start 10 MHz — Pwr -25 dBm Stop 2 GHz 8/11/2010 4 39 PM 1/29/2013 58
- 59. Experimental Verification: Low CMRR Trc1 Sdd21 dB Mag 2 dB / Ref 4 dB Ch1 Cal int PCai 1 of 1 (Max) Trc2 Sdd21 dB Mag 2 dB / Ref 4 dB Ch2 Ca? PCai Trac Stat: Trc1 Sdd21 Sdd21 Cmp In: -4.3 dBm 12 Cmp Out: 3.9 dBm •Trac Stat: Trc2 Sdd21 10 Cmp In: -4.7 dBm Cmp Cmp Out: 3.3 dBm Cmp 8 6 4 2 0 -2 -4 Ch1 TrD Start -25 dBm — Freq 600 MHz Stop 10 dBm Ch2 Start -25 dBm — Freq 600 MHz Stop 10 dBm 1/29/2013 59
- 60. Experimental Verification: High CMRR Trc1 Sdd21 dB Mag 2 dB / Ref 4 dB Ch1 Cal int PCai 1 of 1 (Max) Trc2 Sdd21 dB Mag 2 dB / Ref 4 dB Ch2 Ca? PCai Trac Stat: Trc1 Sdd21 Sdd21 Cmp In: -4.1 dBm 12 Cmp Out: 4.2 dBm •Trac Stat: Trc2 Sdd21 10 Cmp In: -1.0 dBm Cmp Cmp Out: Cmp 7.1 dBm 8 6 4 2 0 -2 -4 Ch1 TrD Start -25 dBm — Freq 600 MHz Stop 10 dBm Ch2 Start -25 dBm — Freq 600 MHz Stop 10 dBm 1/29/2013 60
- 61. Summary and Conclusions 1/29/2013 61
- 62. Summary: TruDi vs. VirDi ı Passive Devices/Linear operation TruDi and VirDi give exactly the same results ı Active Devices/Non-linear operation Significant difference between TruDi and VirDi TruDi represents the real operating conditions of a device ı TruDi Measurements Requires two (or more) phase coherent sources Ability to scan amplitude and phase independently Relative phase stability of VNA sources is crucial for reproducible results 1/29/2013 62
- 63. Thank you for your Attention More information Rohde & Schwarz boot # 701 http://www.rohde-schwarz.com Chris Scholz Christopher.scholz@rsa.rohde-schwarz.com (817) 422 2512
- 64. Appendix: De/Embedding 1/29/2013 64
- 65. (De)Embedding - Matching Networks ı Challenges of Fixtures Mask true device behavior No well characterized ı Disadvantages of Physical Matching Networks: Poor reproducibility Narrow band Restricted to low frequencies Inflexible (one network for one frequency range) ı Use of theoretically Embedded Matching Networks: Both Embedding and Deembedding Highest degree of flexibility to integrate networks No frequency restriction Possible disadvantages just with active devices 1/29/2013 65
- 66. Introduction: Embedding DUT DUT + Test Fixture + Matching Networks Matching Networks not present as hardware but represented by calculation Available Networks: network analyzer 1 DUT • Import of arbitrary S-parameter files Port 2 Port 1 • Use of predefined matching networks DUT DUT + Test Fixture
- 67. Introduction: Deembedding Response of networks network analyzer not corrected by calibration corrected by calculation w/o calibration or deembedding w/o calibration or deembedding Reference plane at POR T 1 Reference plane at POR T 2 DUT Response of test fixture, strip lines etc. • Import of S-parameter files (gained e.g. using a SW design tool) • Use of predefined networks Shift of reference plane by Deembedding (or alternatively via calibration)
- 68. (De)Embedding Networks (single ended DUTs) Single Ended Port (De)Embedding Import of *.s2p files ı 8 predefined networks
- 69. (De)Embedding Networks (single ended DUTs) Pre-defined matching networks
- 70. (De)Embedding Networks (differential DUTs) Balanced Port (De)Embedding ı Import of *.s4p files 12 predefined networks
- 71. (De)Embedding Networks (differential DUTs) Pre-defined matching networks
- 72. Appendix 2: Measurement Wizard 1/29/2013 72
- 73. Measurement Wizard Step 1 : Selection of test configuration
- 74. Measurement Wizard Step 2 : Impedance Settings
- 75. Measurement Wizard Step 3 : Selection of S-Parameters
- 76. Measurement Wizard Step 4 : General Settings
- 77. Measurement Wizard Step 5 : Bandwidth and Power Setting
- 78. Measurement Wizard Step 6 : Calibration
- 79. Measurement Result (1) Measurement result of SAW Filter
- 80. Measurement Result (2) Automatic Amplitude and Phase Imbalance Measurement