Download as PDF, PPTX
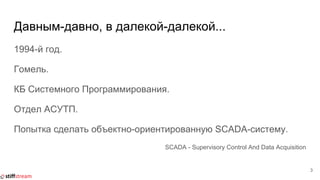


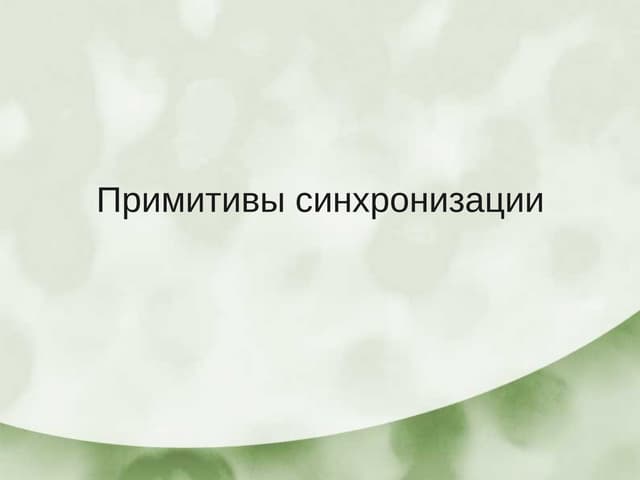
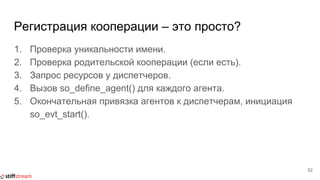
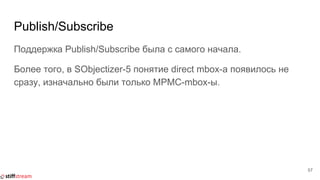
![Агент blinking_led (код)
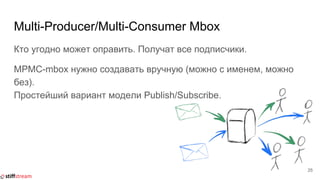
class blinking_led final : public so_5::agent_t {
state_t off{ this }, blinking{ this },
blink_on{ initial_substate_of{ blinking } },
blink_off{ substate_of{ blinking } };
public :
struct turn_on_off : public so_5::signal_t {};
blinking_led( context_t ctx ) : so_5::agent_t{ std::move(ctx) } {
this >>= off;
off.just_switch_to< turn_on_off >( blinking );
blinking.just_switch_to< turn_on_off >( off );
blink_on
.on_enter( []{ std::cout << "ON" << std::endl; } )
.on_exit( []{ std::cout << "off" << std::endl; } )
.time_limit( std::chrono::milliseconds{1500}, blink_off );
blink_off
.time_limit( std::chrono::milliseconds{750}, blink_on );
}
};
33](https://image.slidesharecdn.com/v-170201070143/85/slide-33-320.jpg)
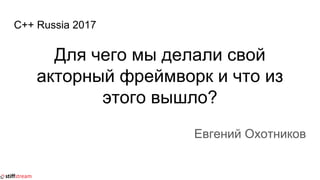
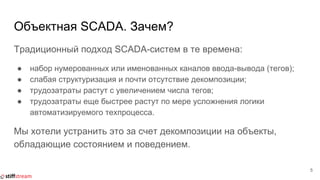
![Агент blinking_led (пояснения)
class blinking_led final : public so_5::agent_t {
state_t off{ this }, blinking{ this },
blink_on{ initial_substate_of{ blinking } },
blink_off{ substate_of{ blinking } };
public :
struct turn_on_off : public so_5::signal_t {};
blinking_led( context_t ctx ) : so_5::agent_t{ std::move(ctx) } {
this >>= off;
off.just_switch_to< turn_on_off >( blinking );
blinking.just_switch_to< turn_on_off >( off );
blink_on
.on_enter( []{ std::cout << "ON" << std::endl; } )
.on_exit( []{ std::cout << "off" << std::endl; } )
.time_limit( std::chrono::milliseconds{1500}, blink_off );
blink_off
.time_limit( std::chrono::milliseconds{750}, blink_on );
}
};
34
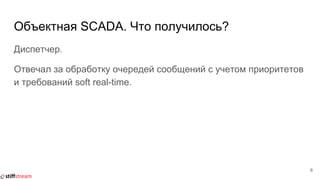
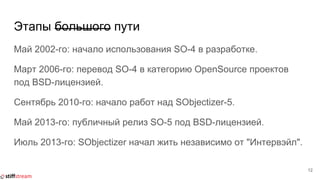
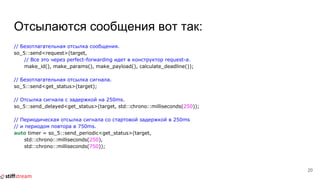
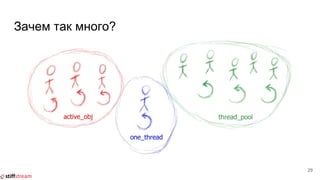
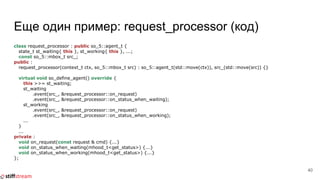
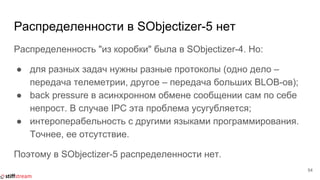
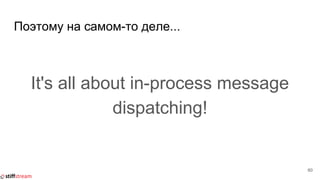
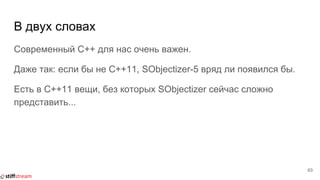
Определение двух
верхнеуровневых
состояний.](https://image.slidesharecdn.com/v-170201070143/85/slide-34-320.jpg)
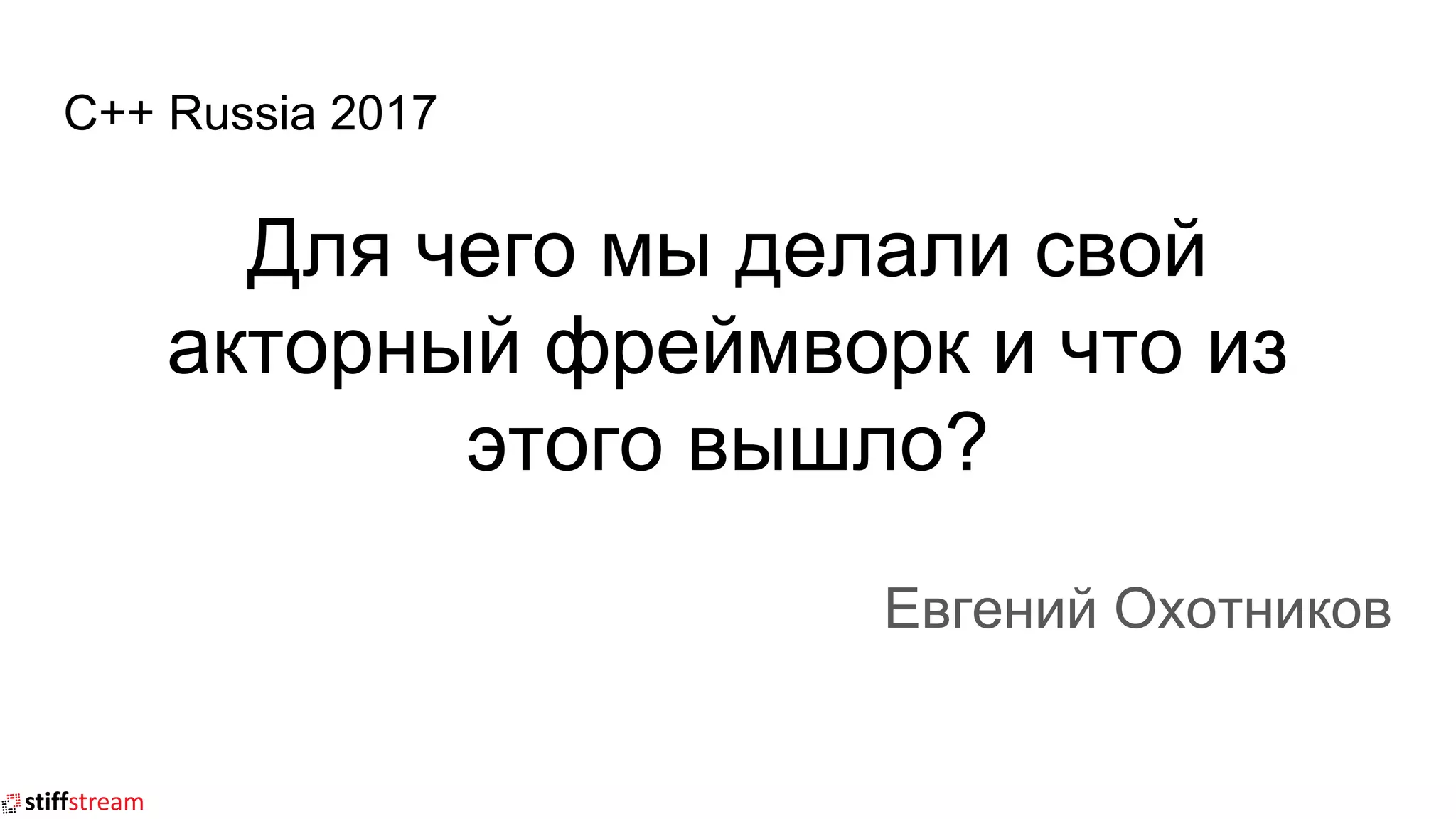
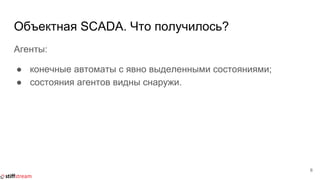
![Агент blinking_led (пояснения)
class blinking_led final : public so_5::agent_t {
state_t off{ this }, blinking{ this },
blink_on{ initial_substate_of{ blinking } },
blink_off{ substate_of{ blinking } };
public :
struct turn_on_off : public so_5::signal_t {};
blinking_led( context_t ctx ) : so_5::agent_t{ std::move(ctx) } {
this >>= off;
off.just_switch_to< turn_on_off >( blinking );
blinking.just_switch_to< turn_on_off >( off );
blink_on
.on_enter( []{ std::cout << "ON" << std::endl; } )
.on_exit( []{ std::cout << "off" << std::endl; } )
.time_limit( std::chrono::milliseconds{1500}, blink_off );
blink_off
.time_limit( std::chrono::milliseconds{750}, blink_on );
}
};
35
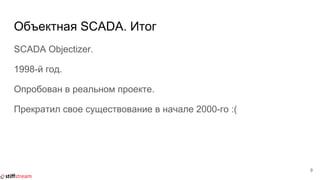
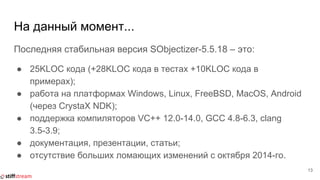
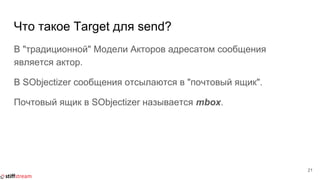
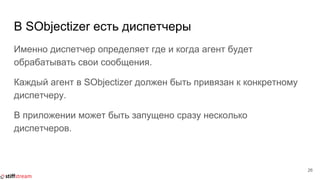
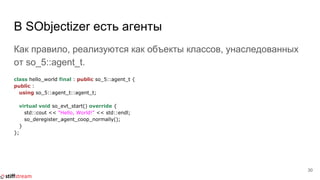
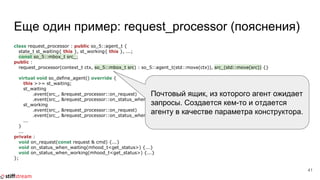
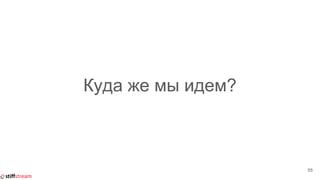
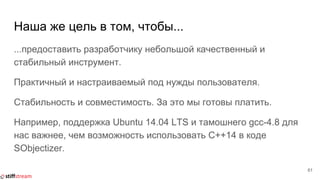
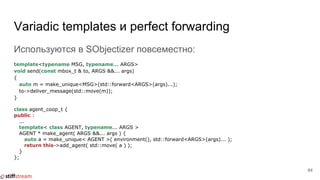
Определение двух вложенных
состояний для состояния blinking.
Подсостояние blink_on является
начальным подсостоянием.](https://image.slidesharecdn.com/v-170201070143/85/slide-35-320.jpg)
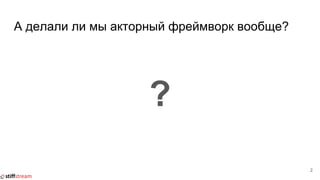
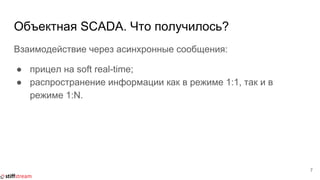
![Агент blinking_led (пояснения)
class blinking_led final : public so_5::agent_t {
state_t off{ this }, blinking{ this },
blink_on{ initial_substate_of{ blinking } },
blink_off{ substate_of{ blinking } };
public :
struct turn_on_off : public so_5::signal_t {};
blinking_led( context_t ctx ) : so_5::agent_t{ std::move(ctx) } {
this >>= off;
off.just_switch_to< turn_on_off >( blinking );
blinking.just_switch_to< turn_on_off >( off );
blink_on
.on_enter( []{ std::cout << "ON" << std::endl; } )
.on_exit( []{ std::cout << "off" << std::endl; } )
.time_limit( std::chrono::milliseconds{1500}, blink_off );
blink_off
.time_limit( std::chrono::milliseconds{750}, blink_on );
}
};
36
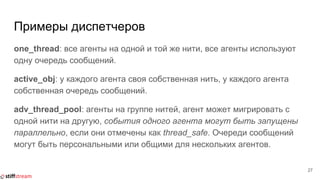
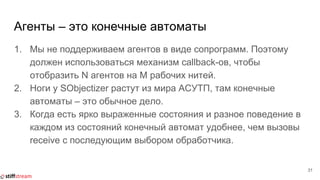
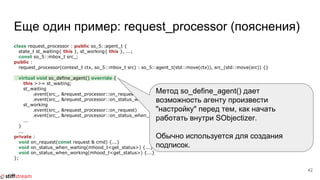
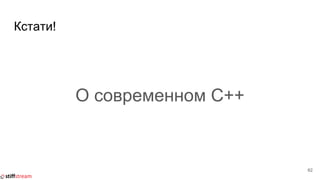
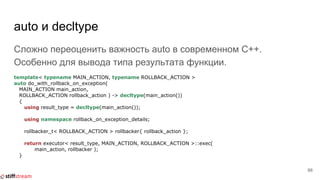
Перевод агента в то состояние, в
котором он должен начать свою работу.
Кому не нравится перегрузка >>= для смены состояния
агента, для тех есть альтернативный синтаксис:
off.activate();
so_change_state(off);](https://image.slidesharecdn.com/v-170201070143/85/slide-36-320.jpg)
![Агент blinking_led (пояснения)
class blinking_led final : public so_5::agent_t {
state_t off{ this }, blinking{ this },
blink_on{ initial_substate_of{ blinking } },
blink_off{ substate_of{ blinking } };
public :
struct turn_on_off : public so_5::signal_t {};
blinking_led( context_t ctx ) : so_5::agent_t{ std::move(ctx) } {
this >>= off;
off.just_switch_to< turn_on_off >( blinking );
blinking.just_switch_to< turn_on_off >( off );
blink_on
.on_enter( []{ std::cout << "ON" << std::endl; } )
.on_exit( []{ std::cout << "off" << std::endl; } )
.time_limit( std::chrono::milliseconds{1500}, blink_off );
blink_off
.time_limit( std::chrono::milliseconds{750}, blink_on );
}
};
37
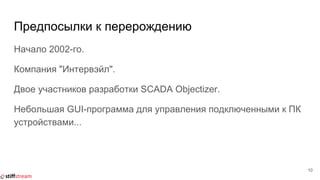
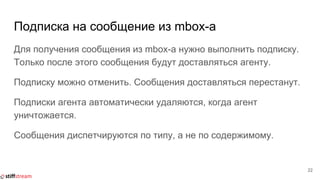
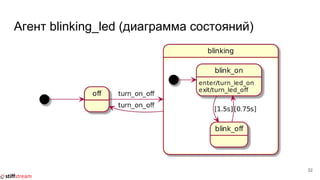
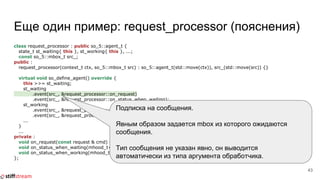
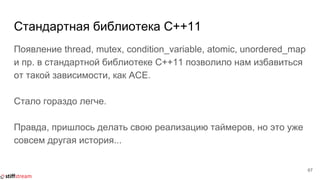
Реакция на сигнал включения и
выключения для верхних состояний.
Достаточно просто перейти в другое
состояние.](https://image.slidesharecdn.com/v-170201070143/85/slide-37-320.jpg)
![Агент blinking_led (пояснения)
class blinking_led final : public so_5::agent_t {
state_t off{ this }, blinking{ this },
blink_on{ initial_substate_of{ blinking } },
blink_off{ substate_of{ blinking } };
public :
struct turn_on_off : public so_5::signal_t {};
blinking_led( context_t ctx ) : so_5::agent_t{ std::move(ctx) } {
this >>= off;
off.just_switch_to< turn_on_off >( blinking );
blinking.just_switch_to< turn_on_off >( off );
blink_on
.on_enter( []{ std::cout << "ON" << std::endl; } )
.on_exit( []{ std::cout << "off" << std::endl; } )
.time_limit( std::chrono::milliseconds{1500}, blink_off );
blink_off
.time_limit( std::chrono::milliseconds{750}, blink_on );
}
};
38
Реакция на вход и
выход из состояния.](https://image.slidesharecdn.com/v-170201070143/85/slide-38-320.jpg)
![Агент blinking_led (пояснения)
class blinking_led final : public so_5::agent_t {
state_t off{ this }, blinking{ this },
blink_on{ initial_substate_of{ blinking } },
blink_off{ substate_of{ blinking } };
public :
struct turn_on_off : public so_5::signal_t {};
blinking_led( context_t ctx ) : so_5::agent_t{ std::move(ctx) } {
this >>= off;
off.just_switch_to< turn_on_off >( blinking );
blinking.just_switch_to< turn_on_off >( off );
blink_on
.on_enter( []{ std::cout << "ON" << std::endl; } )
.on_exit( []{ std::cout << "off" << std::endl; } )
.time_limit( std::chrono::milliseconds{1500}, blink_off );
blink_off
.time_limit( std::chrono::milliseconds{750}, blink_on );
}
};
39
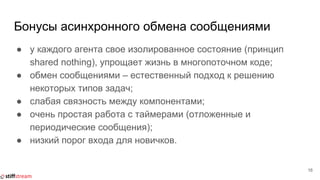
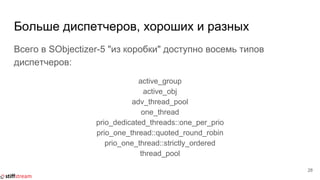
time_limit задает ограничение на
время пребывания агента в
состоянии.
По истечении этого времени агент
автоматически меняет состояние.](https://image.slidesharecdn.com/v-170201070143/85/slide-39-320.jpg)
 {
env.register_agent_as_coop("hello", env.make_agent<hello_world>());
});
return 0;
}
53](https://image.slidesharecdn.com/v-170201070143/85/slide-53-320.jpg)
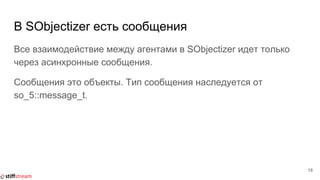
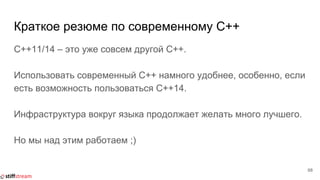
![CSP (Communicating Sequential Processes)
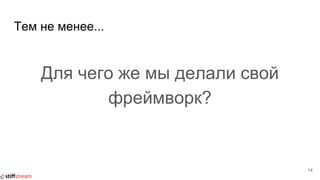
В декабре 2015-го добавлены message chains.
struct ping {}; struct pong {};
auto ch1 = so_5::create_mchain(env);
auto ch2 = so_5::create_mchain(env);
std::thread pinger{ [ch1, ch2]{
while(true) {
so_5::send<ping>(ch2);
so_5::receive(ch1, so_5::infinite_wait, [](pong){});
}
} };
std::thread ponger{ [ch1, ch2]{
while(true) {
so_5::receive(ch2, so_5::infinite_wait, [&ch1](ping) { so_5::send<pong>(ch1); } );
}
} };
58](https://image.slidesharecdn.com/v-170201070143/85/slide-58-320.jpg)
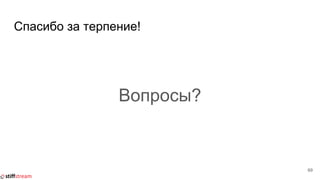
![CSP (Communicating Sequential Processes)
В декабре 2015-го добавлены message chains.
struct ping {}; struct pong {};
auto ch1 = so_5::create_mchain(env);
auto ch2 = so_5::create_mchain(env);
std::thread pinger{ [ch1, ch2]{
while(true) {
so_5::send<ping>(ch2);
so_5::receive(ch1, so_5::infinite_wait, [](pong){});
}
} };
std::thread ponger{ [ch1, ch2]{
while(true) {
so_5::receive(ch2, so_5::infinite_wait, [&ch1](ping) { so_5::send<pong>(ch1); } );
}
} };
59](https://image.slidesharecdn.com/v-170201070143/85/slide-59-320.jpg)
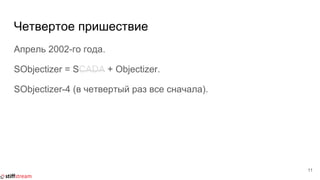
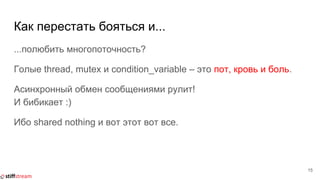
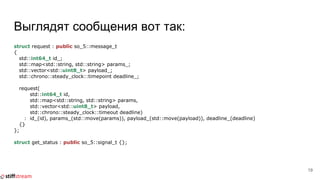
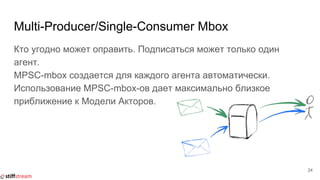
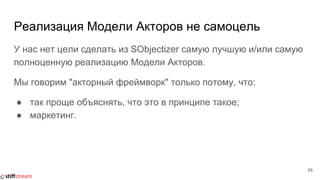
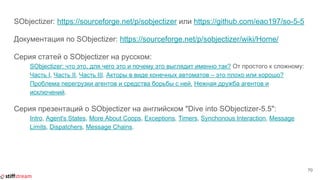
![Лямбды (особенно в сочетании с шаблонами)
Ну очень сильно помогают. В том числе и для обеспечения
гарантий безопасности исключений...
void agent_core_t::next_coop_reg_step__update_registered_coop_map(
const coop_ref_t & coop_ref,
coop_t * parent_coop_ptr )
{
m_registered_coop[ coop_ref->query_coop_name() ] = coop_ref;
m_total_agent_count += coop_ref->query_agent_count();
so_5::details::do_with_rollback_on_exception(
[&] {
next_coop_reg_step__parent_child_relation( coop_ref, parent_coop_ptr );
},
[&] {
m_total_agent_count -= coop_ref->query_agent_count();
m_registered_coop.erase( coop_ref->query_coop_name() );
} );
}
65
(1)
(2)
(3)](https://image.slidesharecdn.com/v-170201070143/85/slide-65-320.jpg)

Документ описывает разработку актерного фреймворка SObjectizer, который был создан для решения проблем традиционных SCADA-систем через использование объектно-ориентированного подхода и асинхронного обмена сообщениями. Много внимания уделяется архитектуре фреймворка, включающей диспетчеров и агенты, а также их реализации и взаимодействию. Также освещается эволюция SObjectizer с момента его создания до текущей стабильной версии 5.5.18.






















































![[C++ CoreHard Autumn 2018] Actors vs CSP vs Task...](https://cdn.slidesharecdn.com/ss_thumbnails/actorsvscspvstasks-181104072639-thumbnail.jpg?width=640&height=640&fit=bounds)