Download as PDF, PPTX

![There are several ways of initiating service requests.
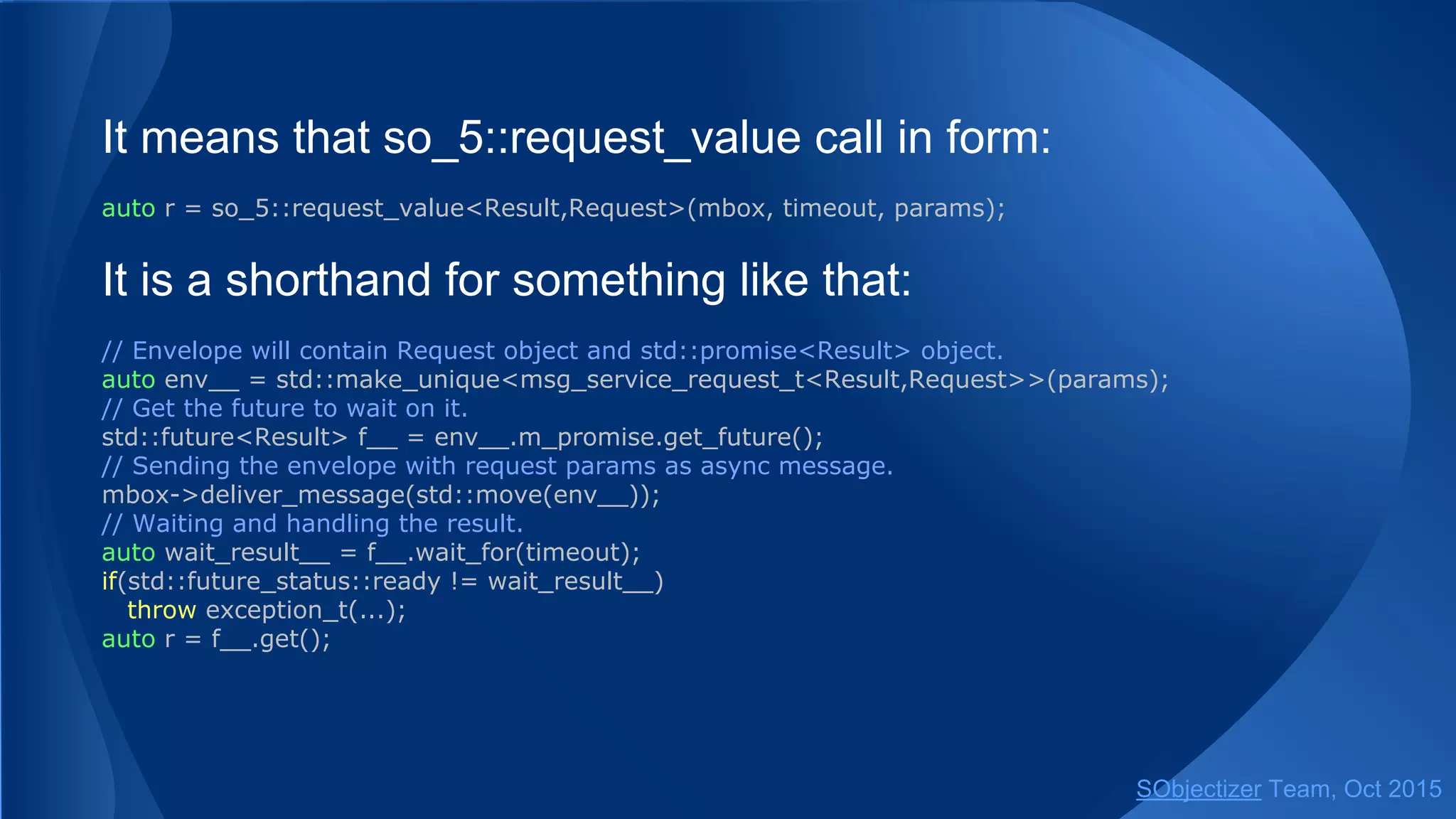
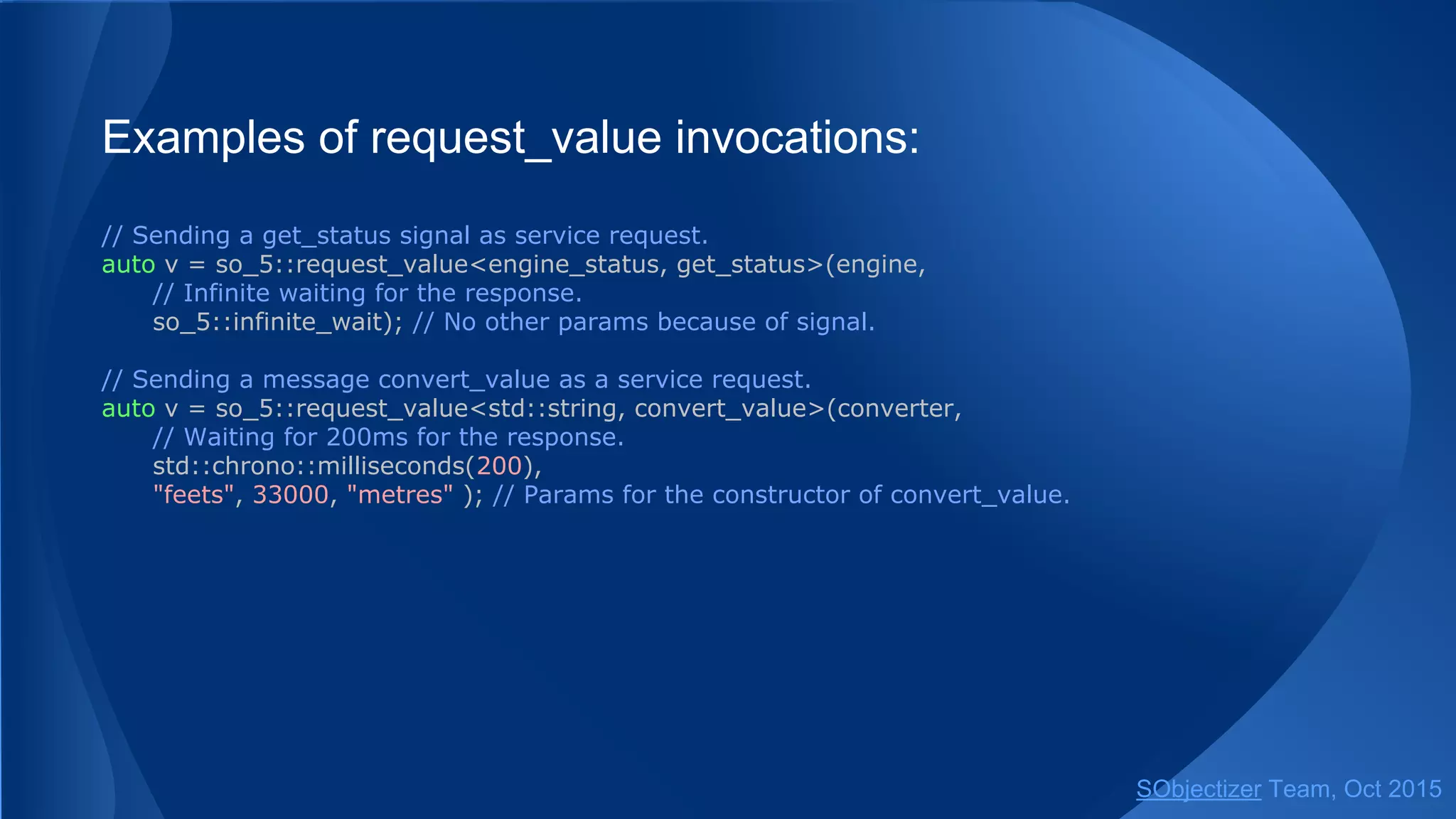
The simplest one is the usage of so_5::request_value()
template function. It can be used in the form:
Result r = so_5::request_value<Result, Request>(Target, Timeout [,Args]);
Where Timeout is a value which is defined by std::chrono or
so_5::infinite_wait for non-limited waiting of the result.
Type of Request can be any message or signal type. All
Args (if any) will be passed to the constructor of Request.
SObjectizer Team, Jan 2016](https://image.slidesharecdn.com/diveintosobjectizer-5-151029053958-lva1-app6891/75/Dive-into-SObjectizer-5-5-Sixth-part-Synchronous-Interaction-32-2048.jpg)
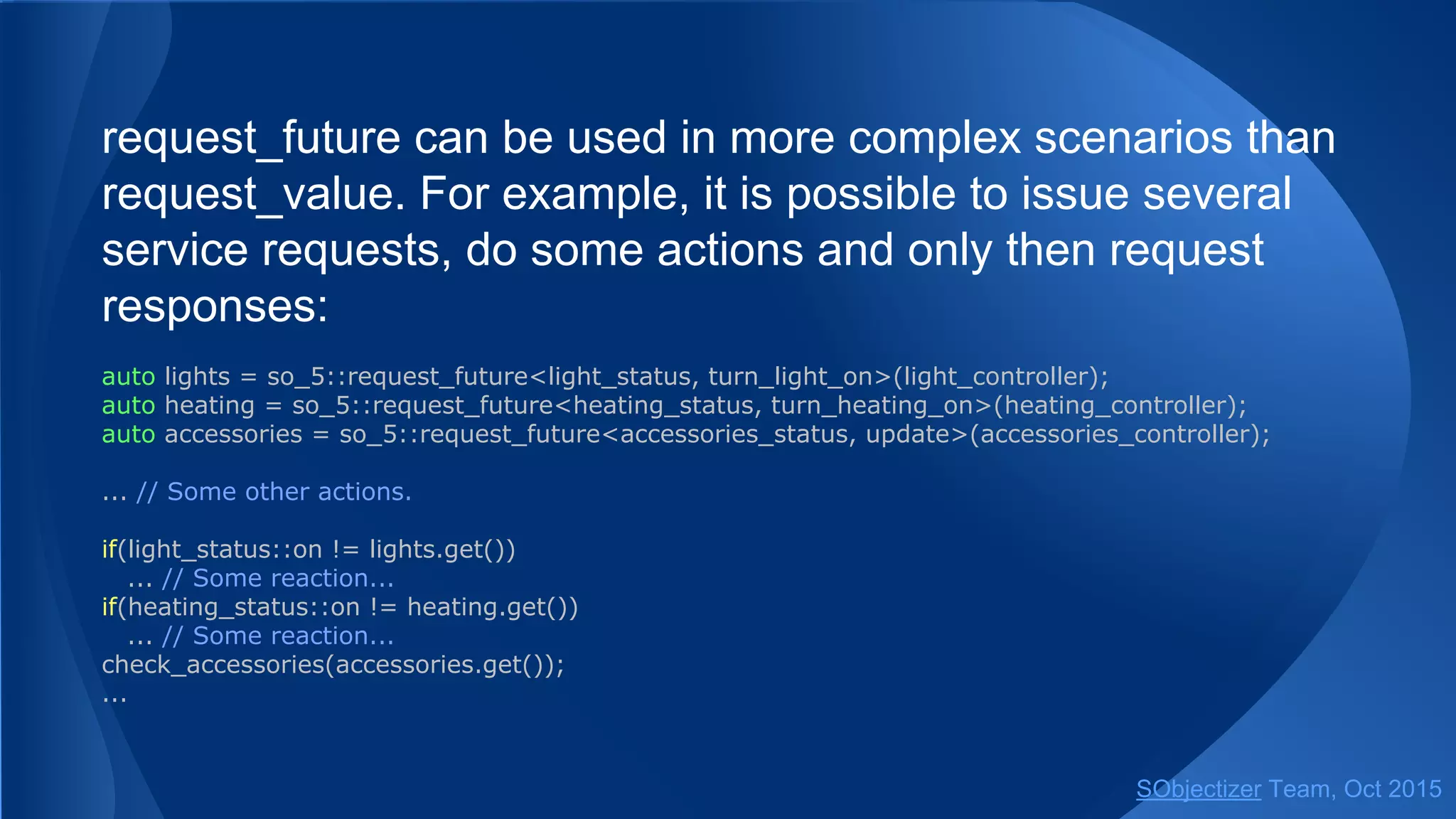
![There is also so_5::request_future() template function. It
returns std::future<Result> object:
std::future<Result> r = so_5::request_future<Result, Request>(Target [,Args]);
There is no Timeout argument. Waiting on the std::future is
responsibility of a programmer.
As in the case of request_value type of Request can be any
of message or signal type. All Args (if any) will be passed to
the constructor of Request.
SObjectizer Team, Jan 2016](https://image.slidesharecdn.com/diveintosobjectizer-5-151029053958-lva1-app6891/75/Dive-into-SObjectizer-5-5-Sixth-part-Synchronous-Interaction-34-2048.jpg)

The document discusses synchronous interactions in the sobjectizer-5.5 framework, contrasting them with asynchronous interactions between agents. It explains how synchronous requests simplify code and improve robustness but also introduces potential issues like deadlocks and thread blocking. Additionally, it provides code examples and details the handling of exceptions in synchronous request scenarios.








































![[C++ CoreHard Autumn 2018] Actors vs CSP vs Task...](https://cdn.slidesharecdn.com/ss_thumbnails/actorsvscspvstasks-181104072639-thumbnail.jpg?width=640&height=640&fit=bounds)






























