Downloaded 20 times
![2
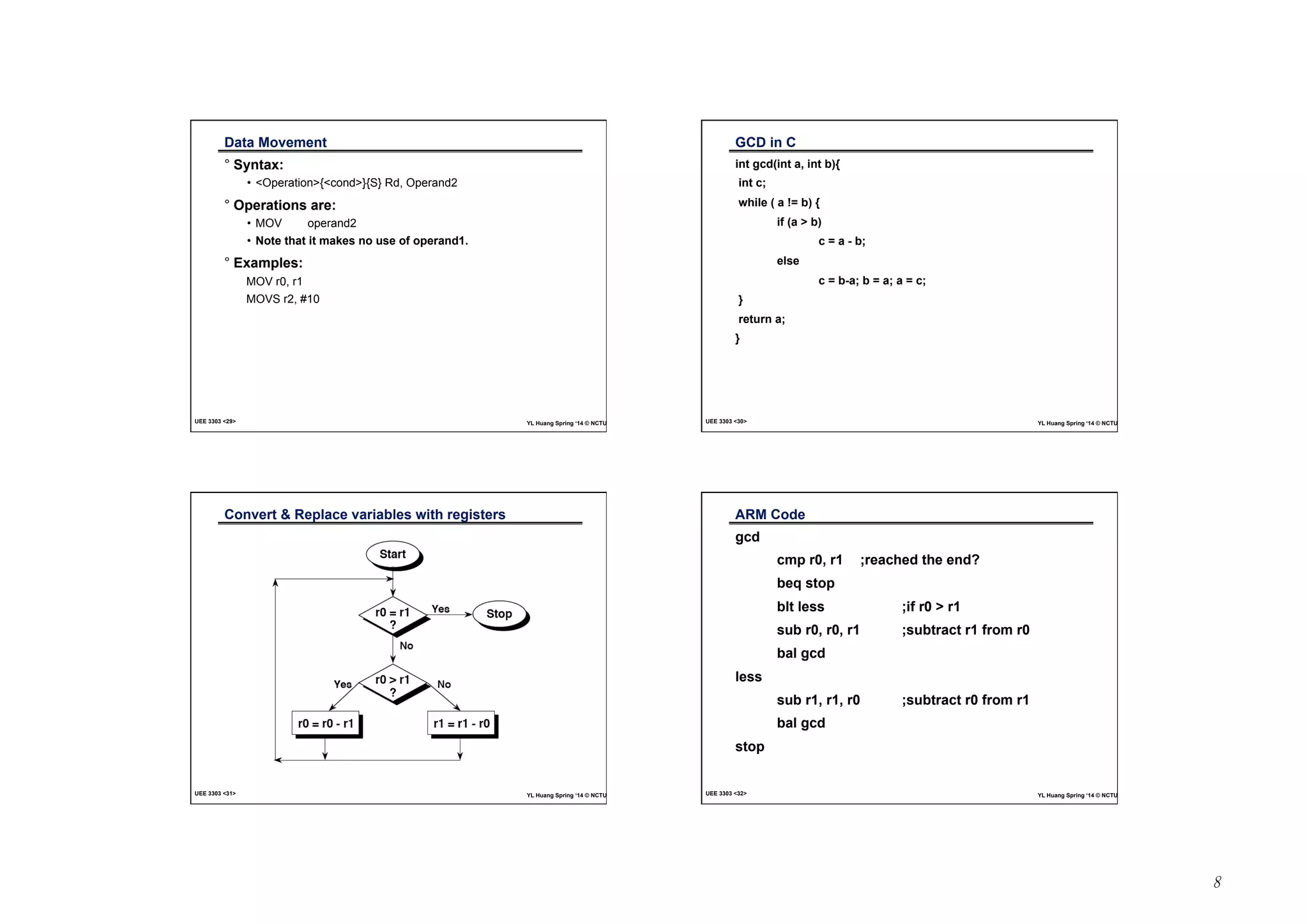
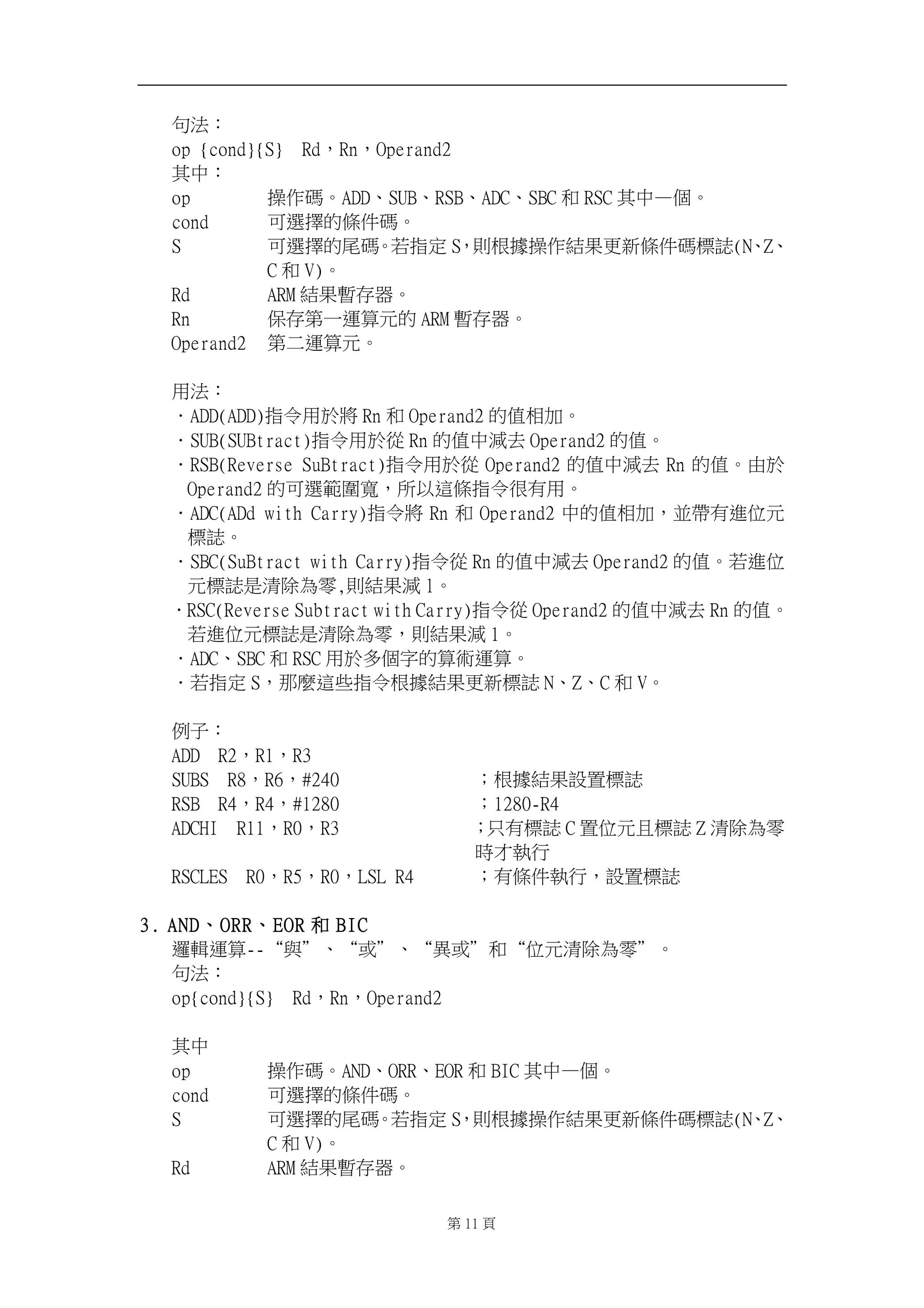
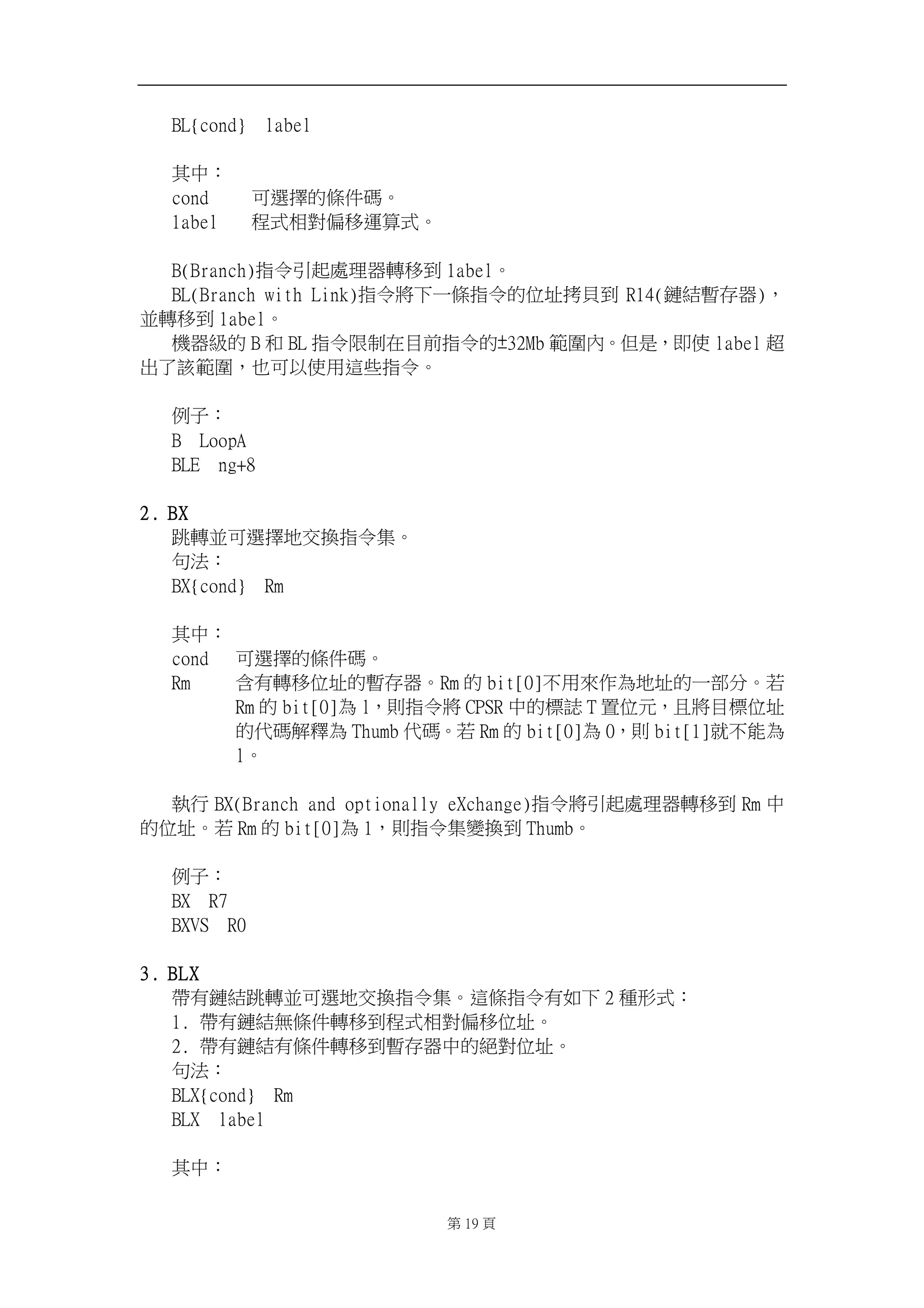
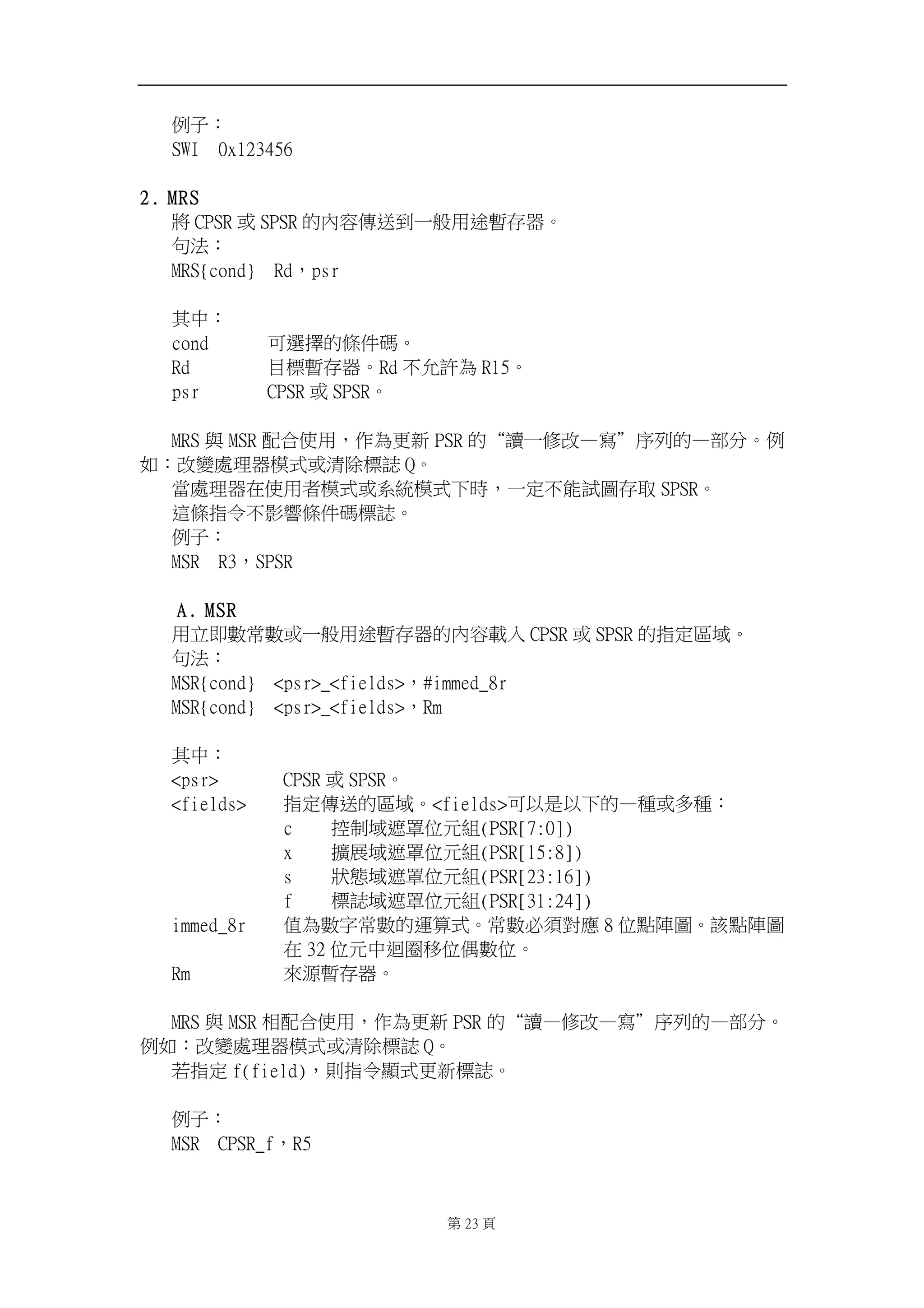
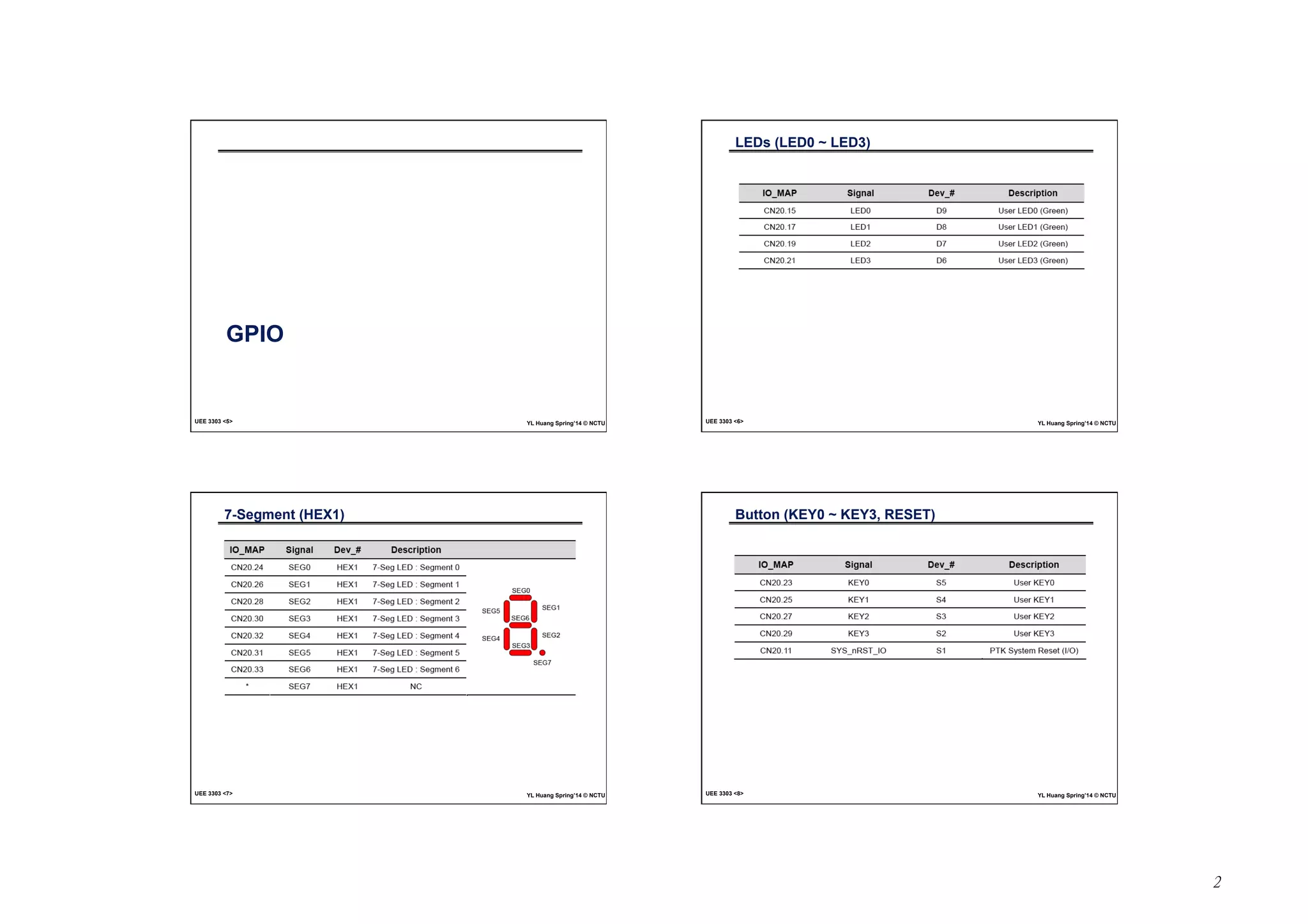
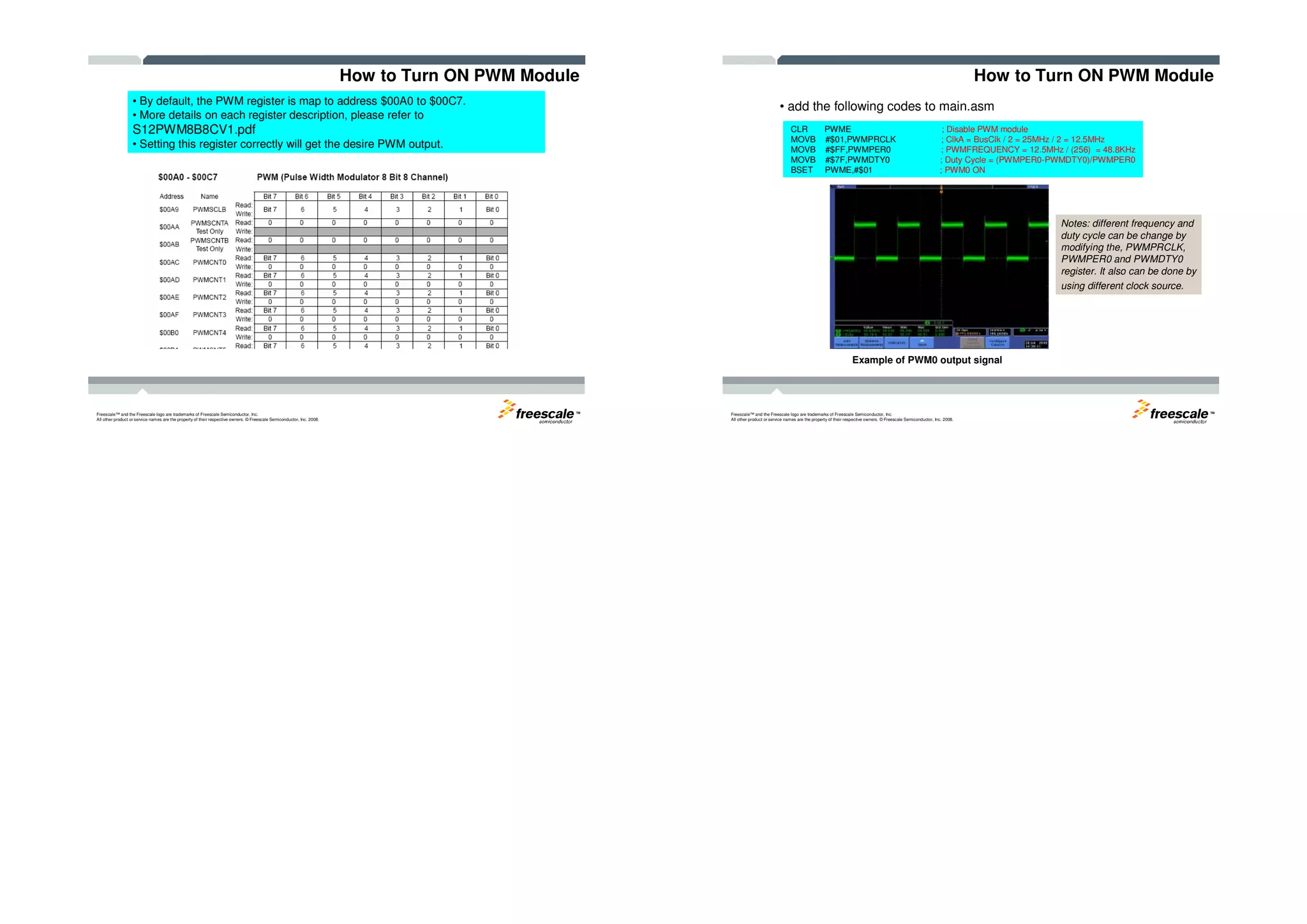
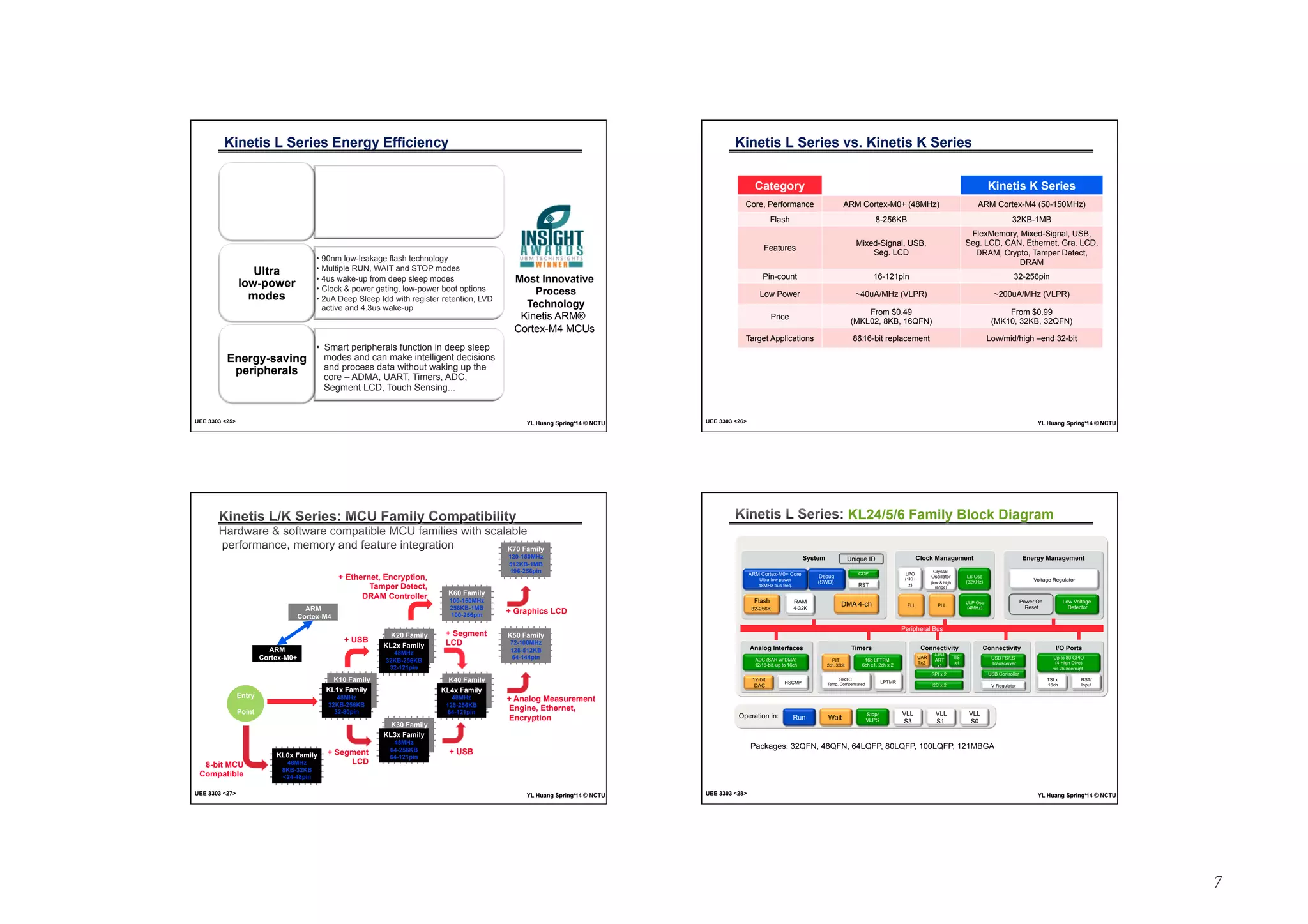
Memory Operands
° Complex data structures – array/structures – are kept in memory
° Arithmetic operations occur only on registers in MIPS instr.
• MIPS must include instructions that transfer data between memory and
registers
- Data transfer instructions
• To access a word in memory, the instruction must supply the memory
‘address’
UEE 3303 <5> YL Huang Spring‘14 © NCTU
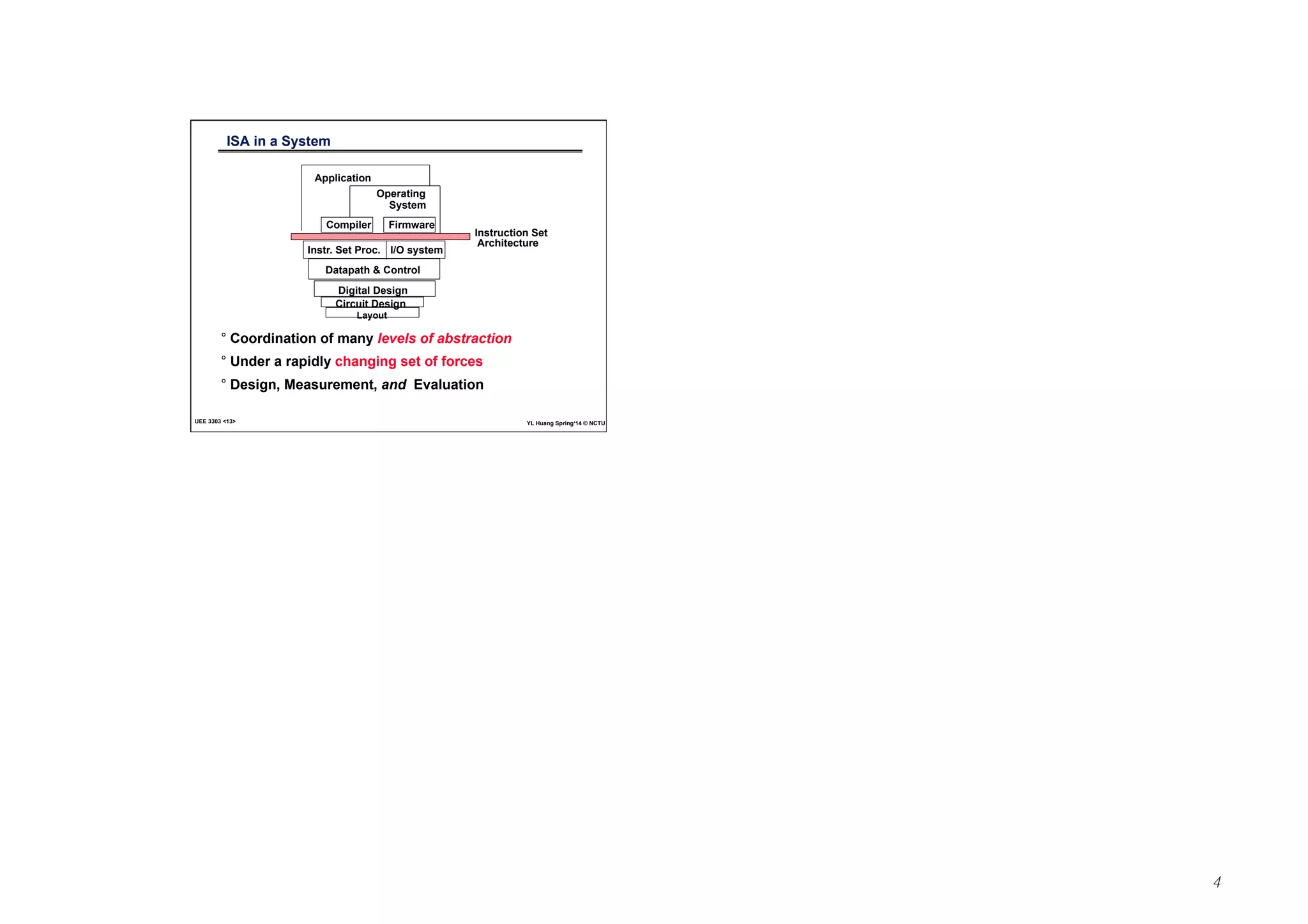
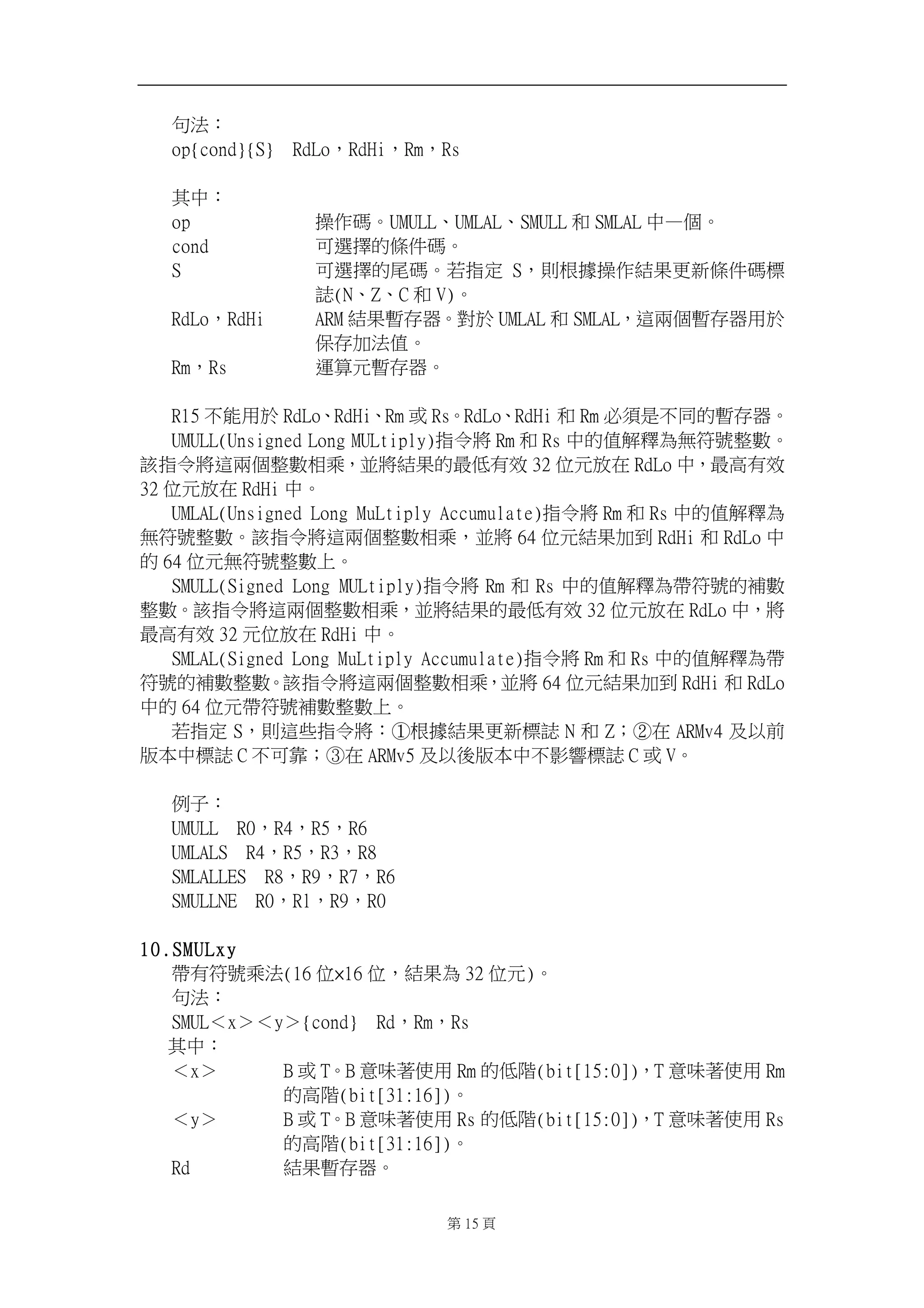
Byte vs. Word
° Bytes are nice, but most data items use larger
"words"
° For MIPS, a word is 32 bits or 4 bytes.
0
4
8
12
...
32 bits of data
Word must start at addr
32 bits of data
the are multiples of 4
32 bits of data
32 bits of data Registers hold 32 bits of data
° 232 bytes with byte addresses from 0 to 232-1
° 230 words with byte addresses 0, 4, 8, ... 232-4
° Words are aligned
i.e., what are the least 2 significant bits of a word address?
- Left most: big endian
- Right most: little endian
UEE 3303 <6> YL Huang Spring‘14 © NCTU
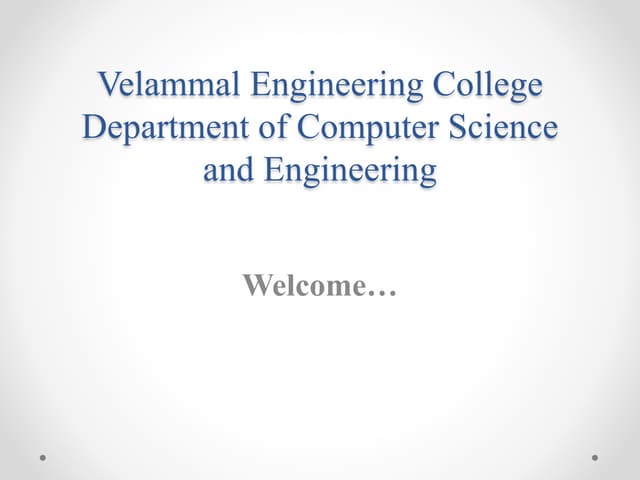
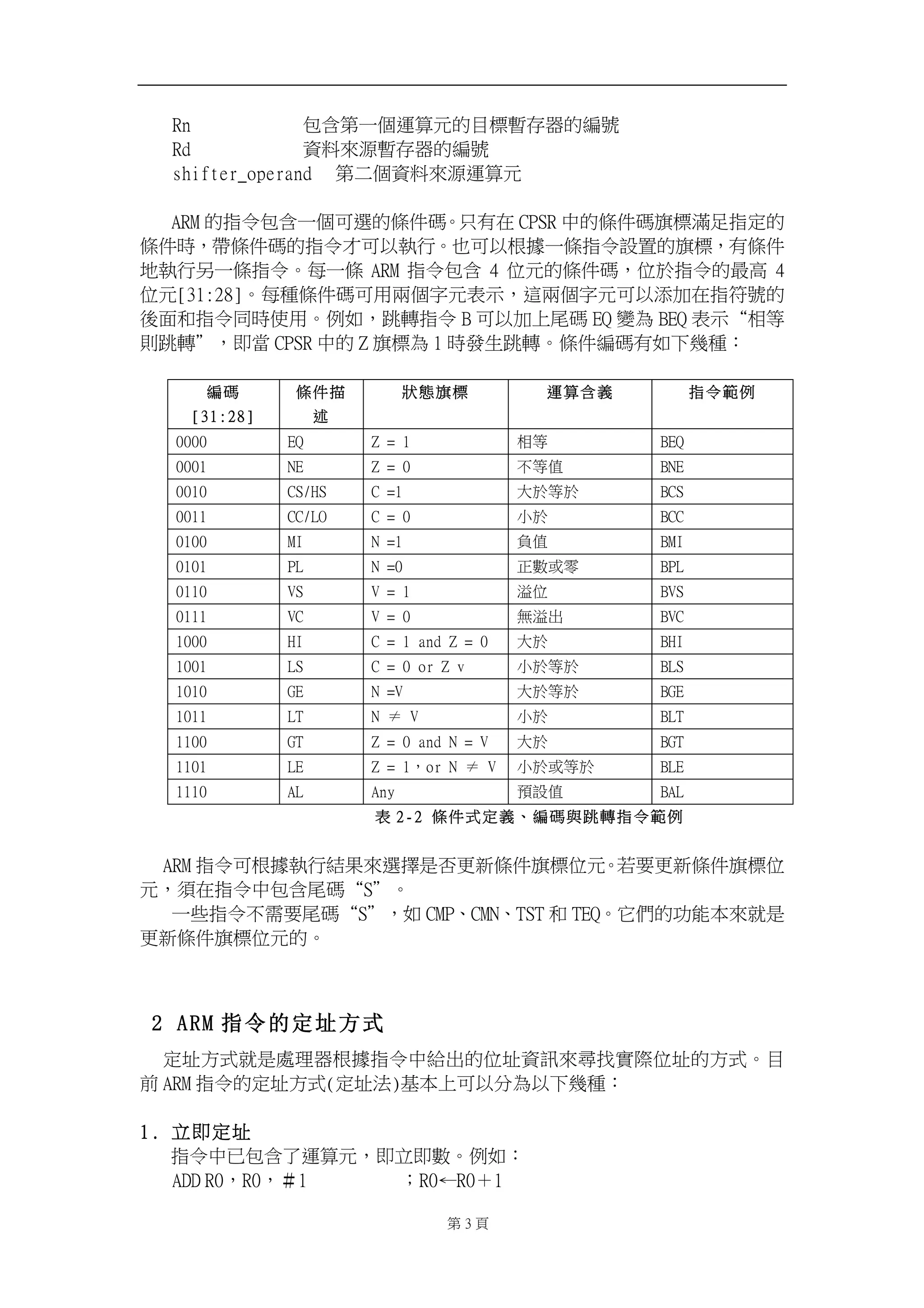
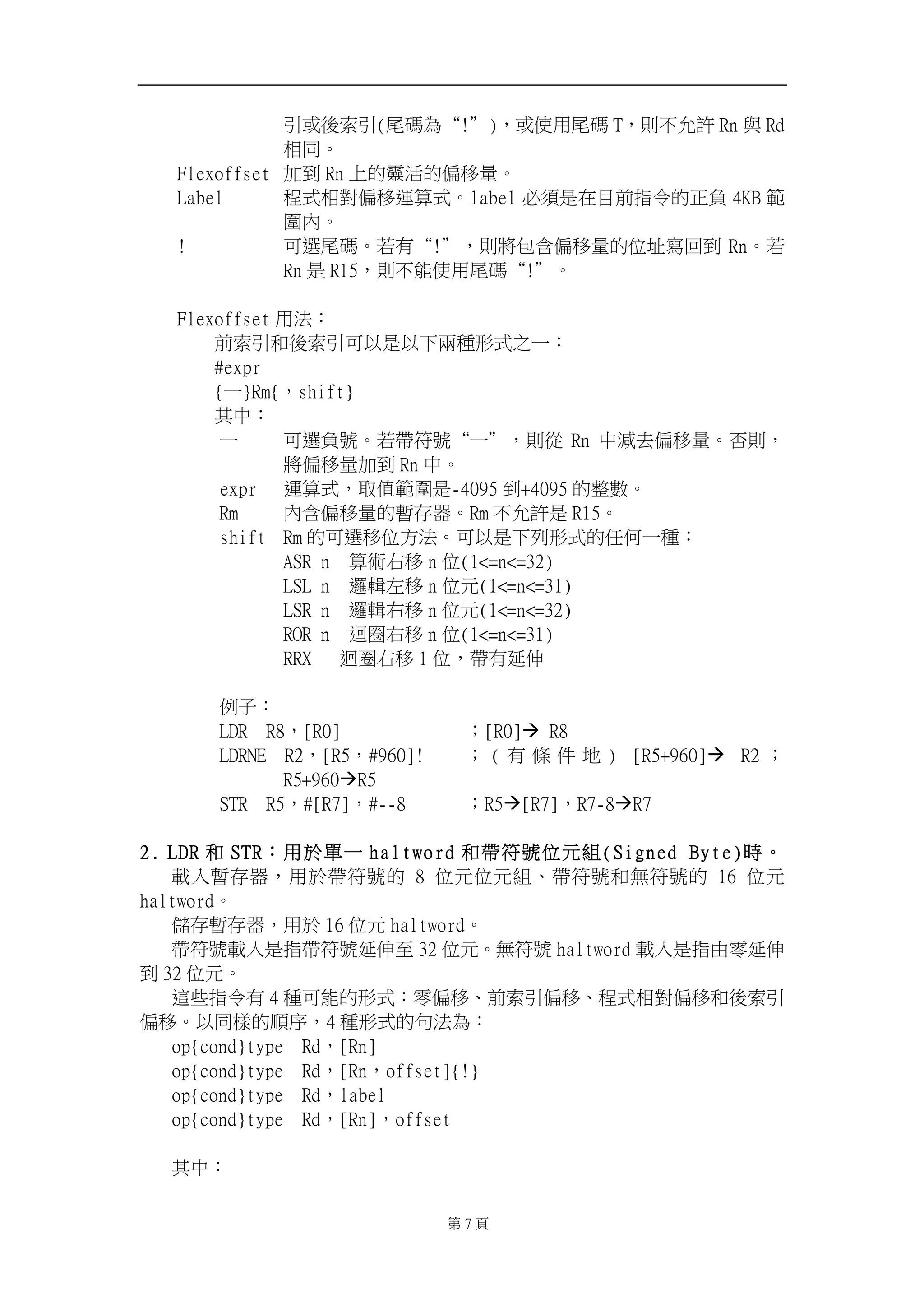
Instructions
° Load and store instructions
° Example:
C code: A[12] = h + A[8];
MIPS code: lw $t0, 32($s3)
add $t0, $s2, $t0
sw $t0, 48($s3)
1. h is associated with $s2
2. base addr of array A is in
$s3
° Can refer to registers by name (e.g., $s2, $t2) instead of number
° Store word has destination last
° Remember arithmetic operands are registers, not memory!
Can’t write: add 48($s3), $s2, 32($s3)
UEE 3303 <7> YL Huang Spring‘14 © NCTU
So far
° Instruction Meaning
add $s1,$s2,$s3 $s1 = $s2 + $s3
sub $s1,$s2,$s3 $s1 = $s2 – $s3
lw $s1,100($s2) $s1 = Memory[$s2+100]
sw $s1,100($s2) Memory[$s2+100] = $s1
bne $s4,$s5,L Next instr. is at Label if $s4 ≠ $s5
beq $s4,$s5,L Next instr. is at Label if $s4 = $s5
j Label Next instr. is at Label
° Formats:
?
op rs rt rd shamt funct
op rs rt 16 bit address
op 26 bit address
R
I
J
R: register
I: immediate
UEE 3303 <8> YL Huang Spring‘14 © NCTU](https://image.slidesharecdn.com/random-140905124409-phpapp02/75/slide-6-2048.jpg)
![3
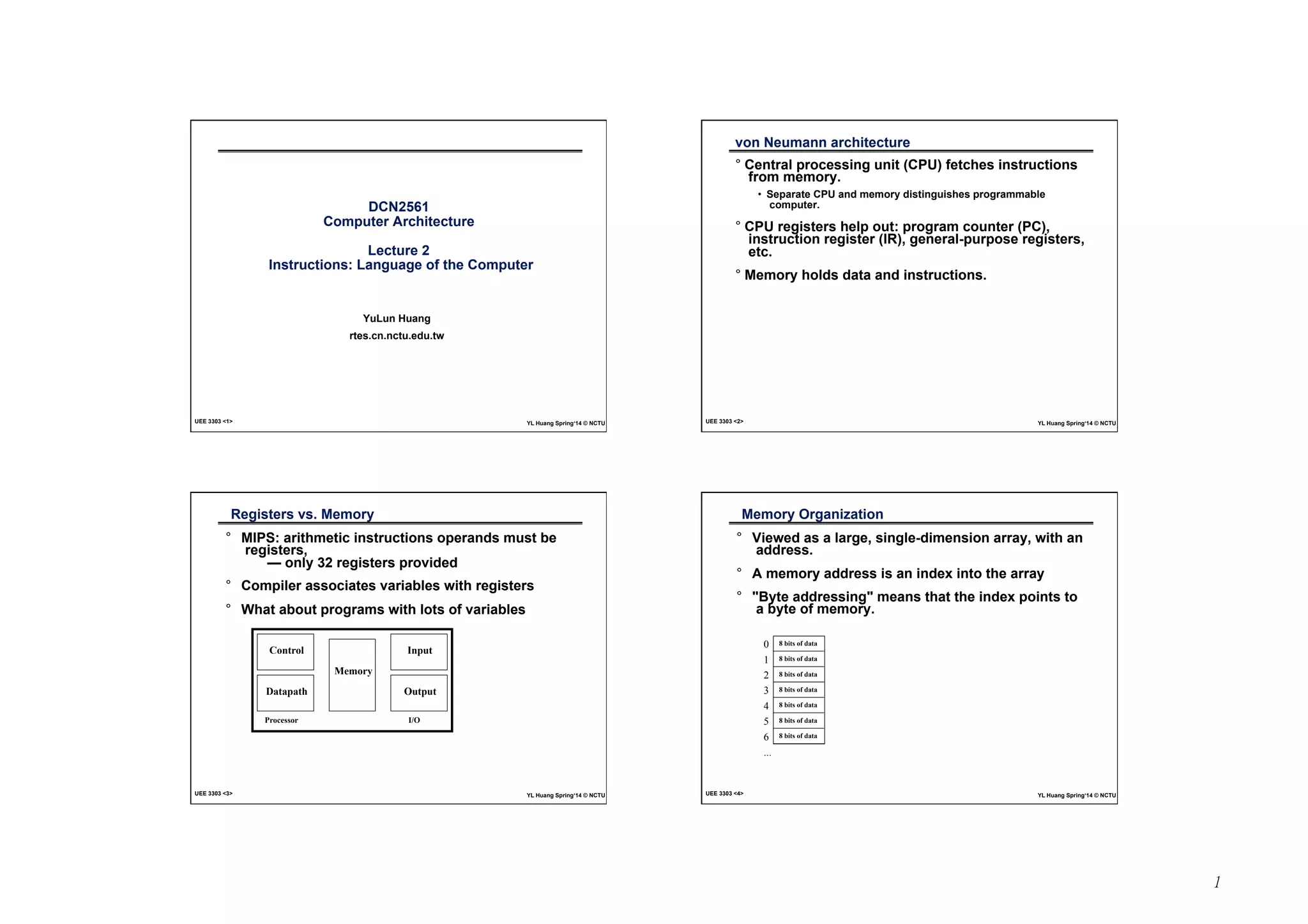
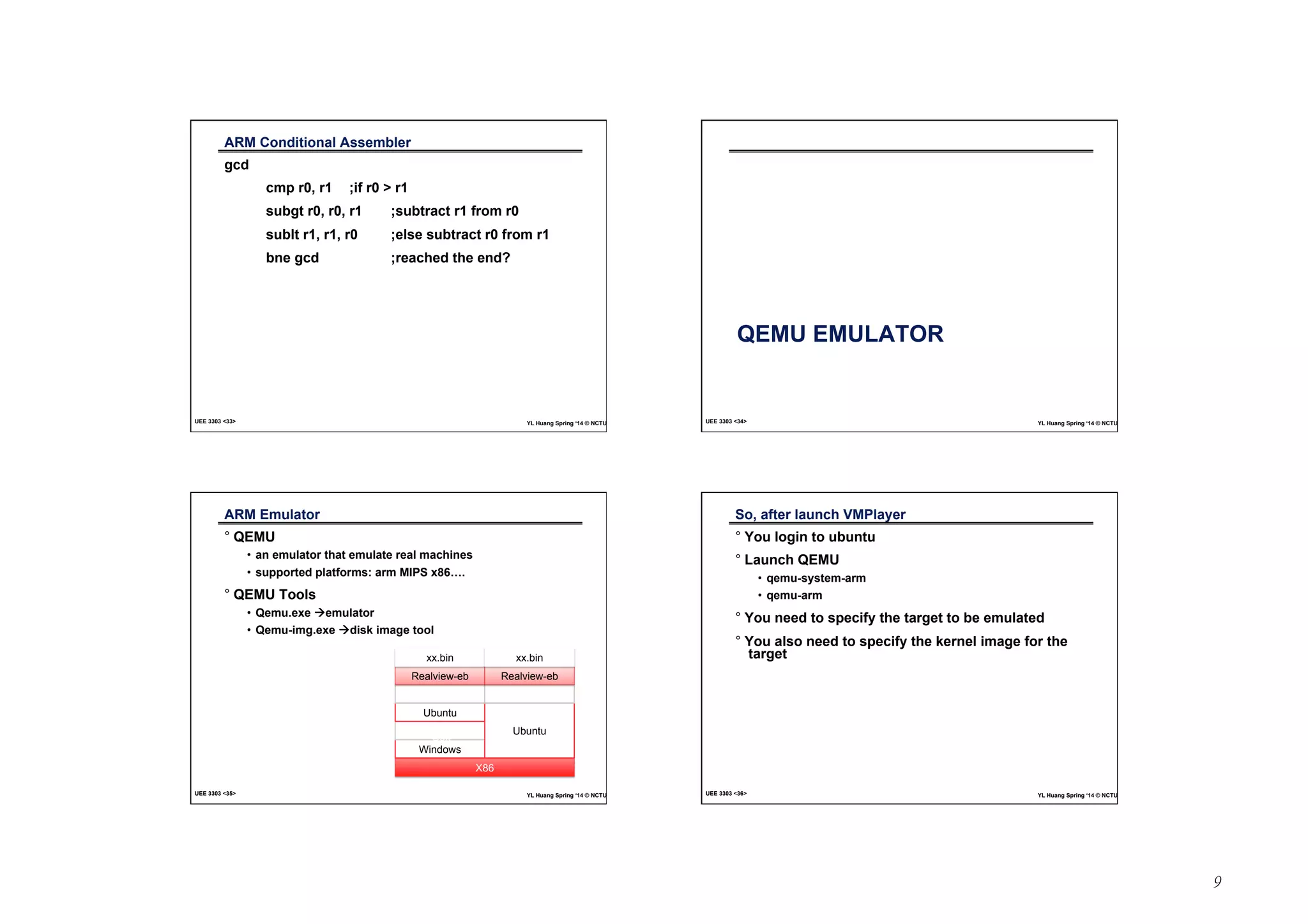
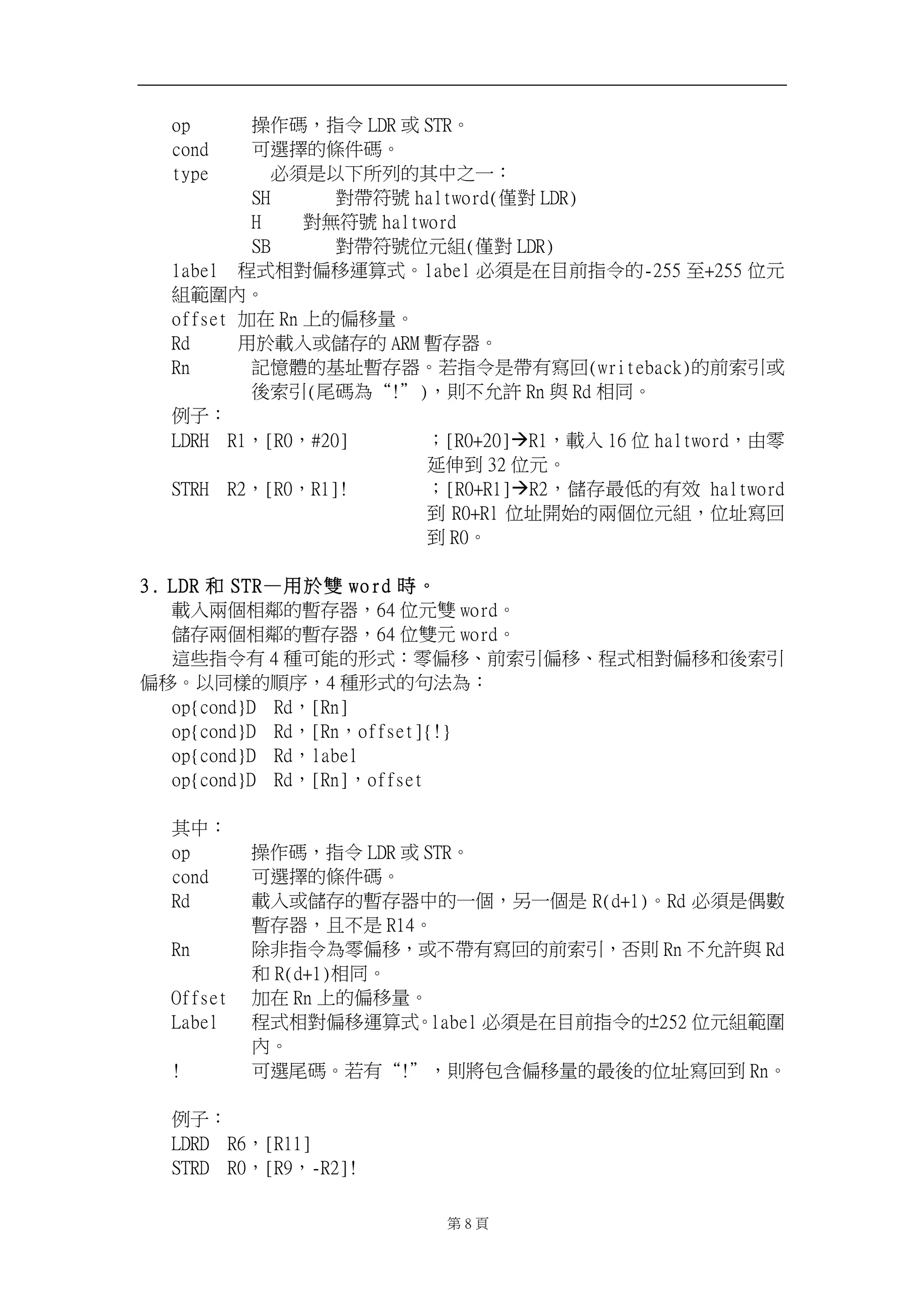
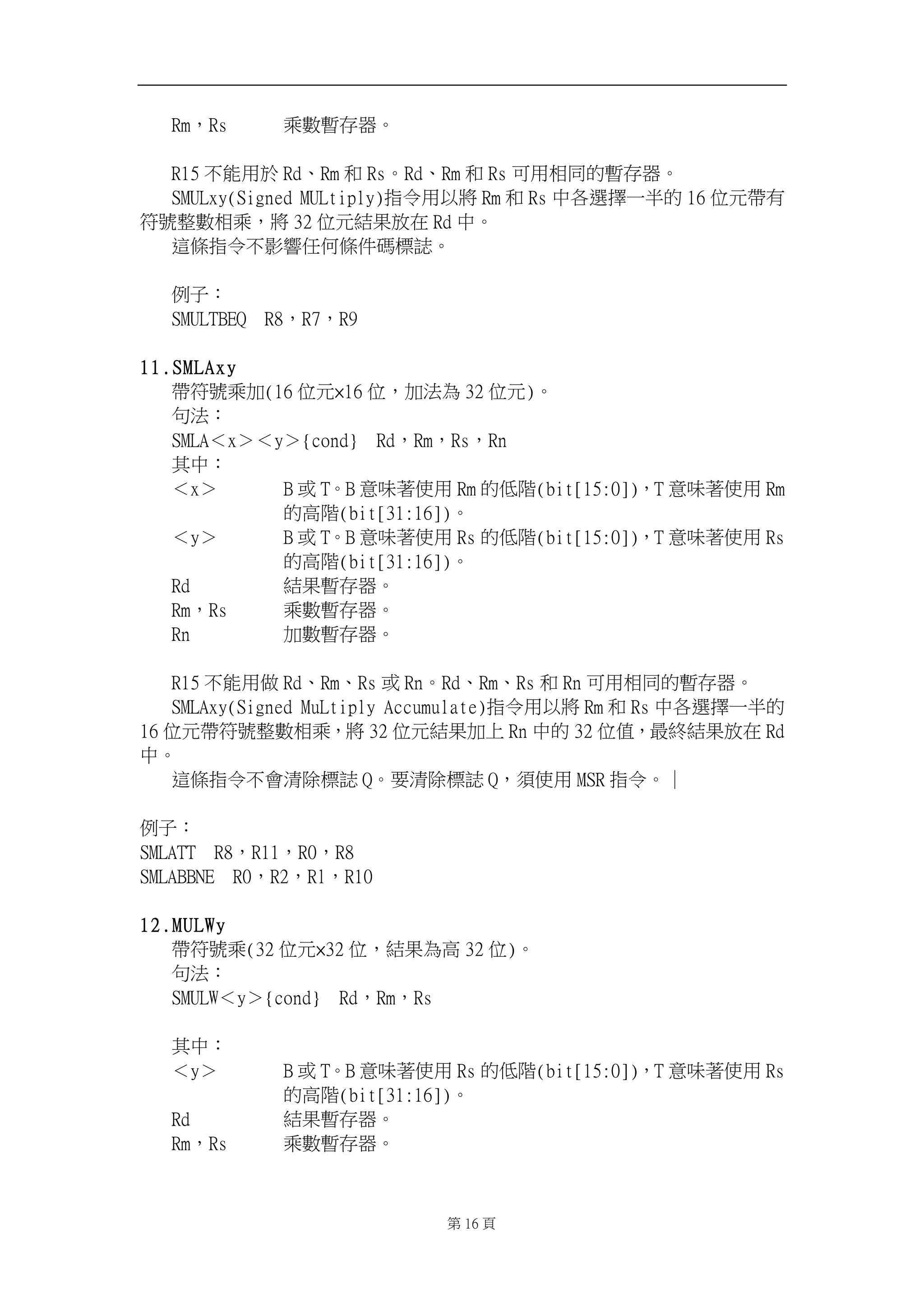
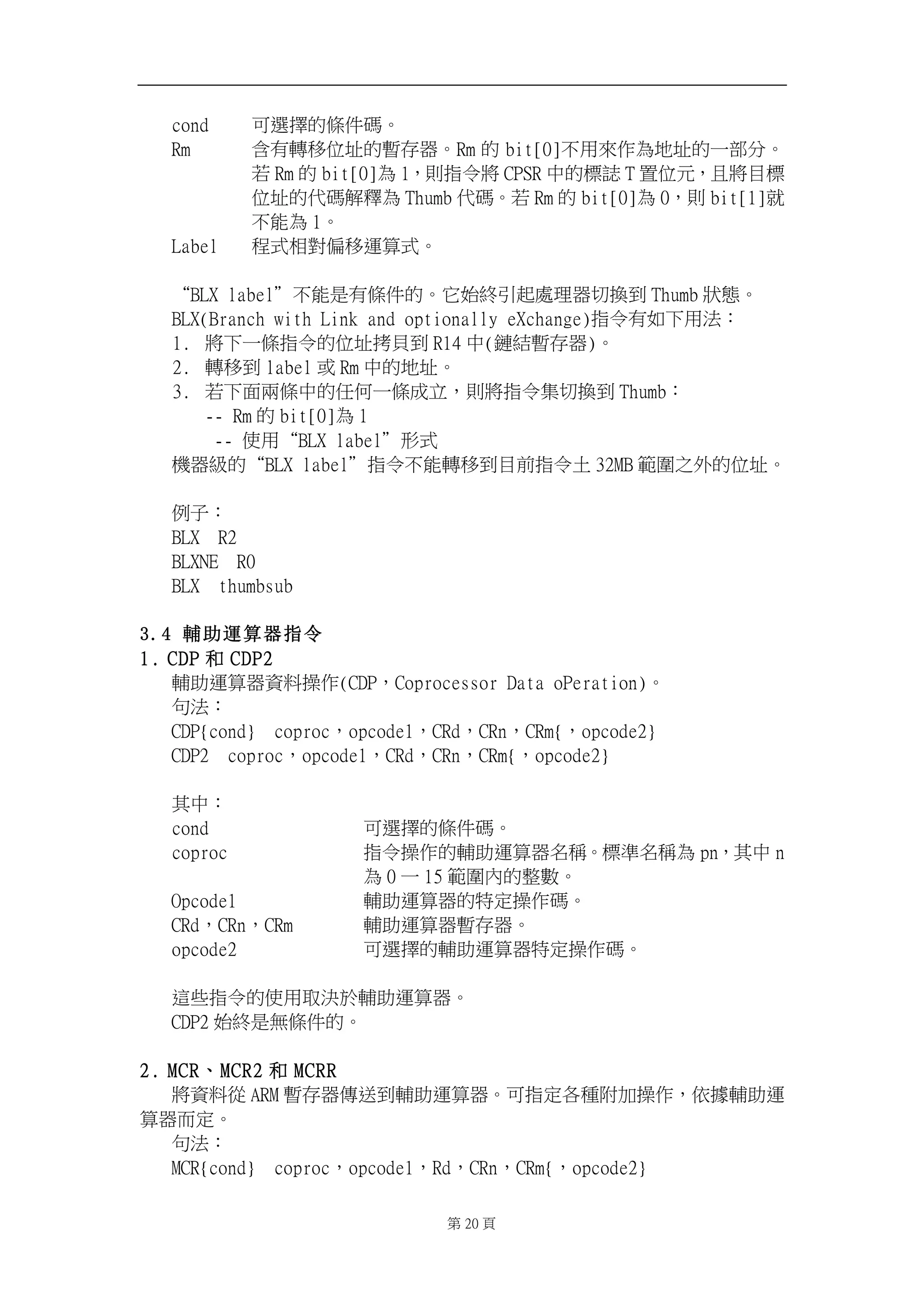
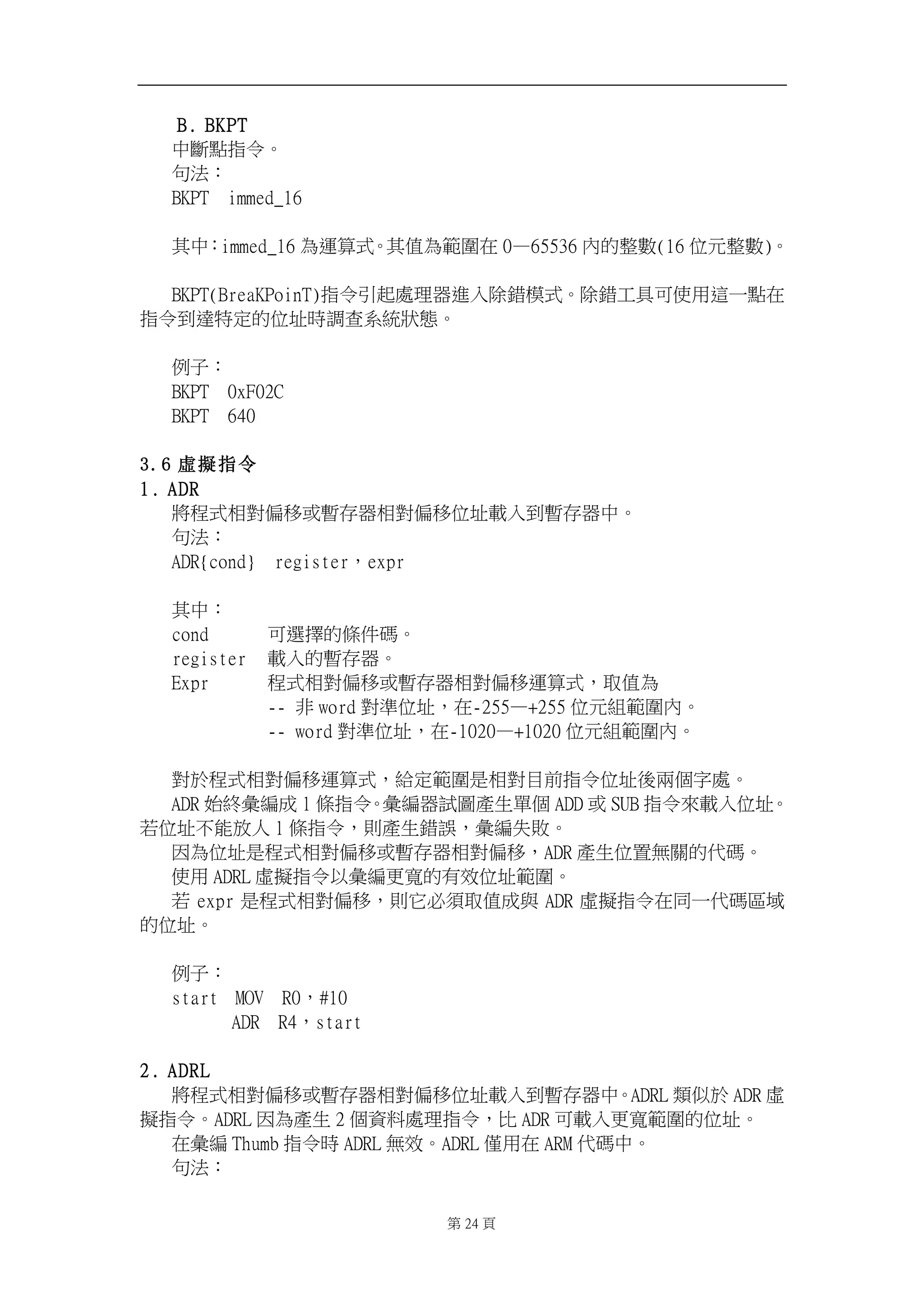
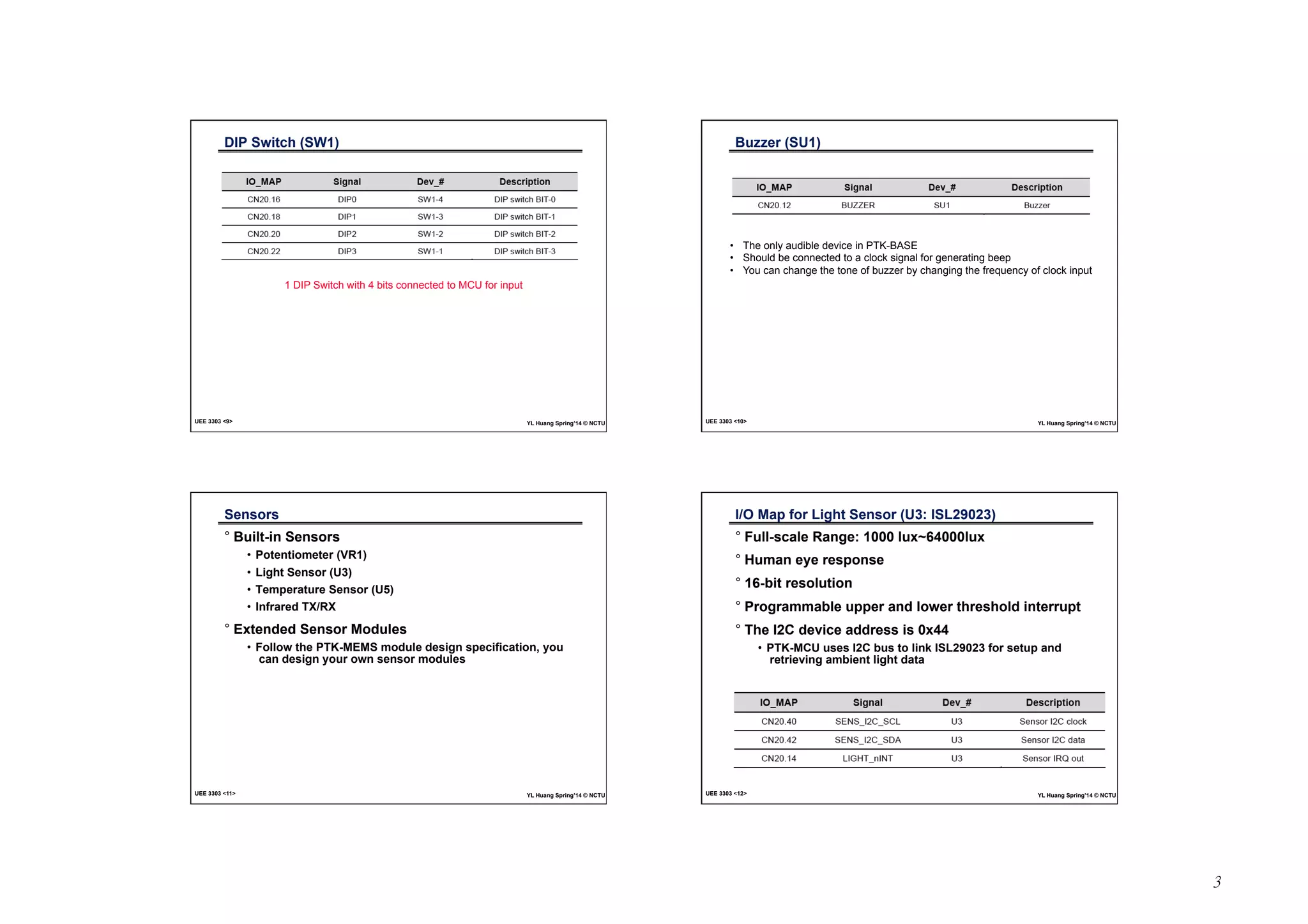
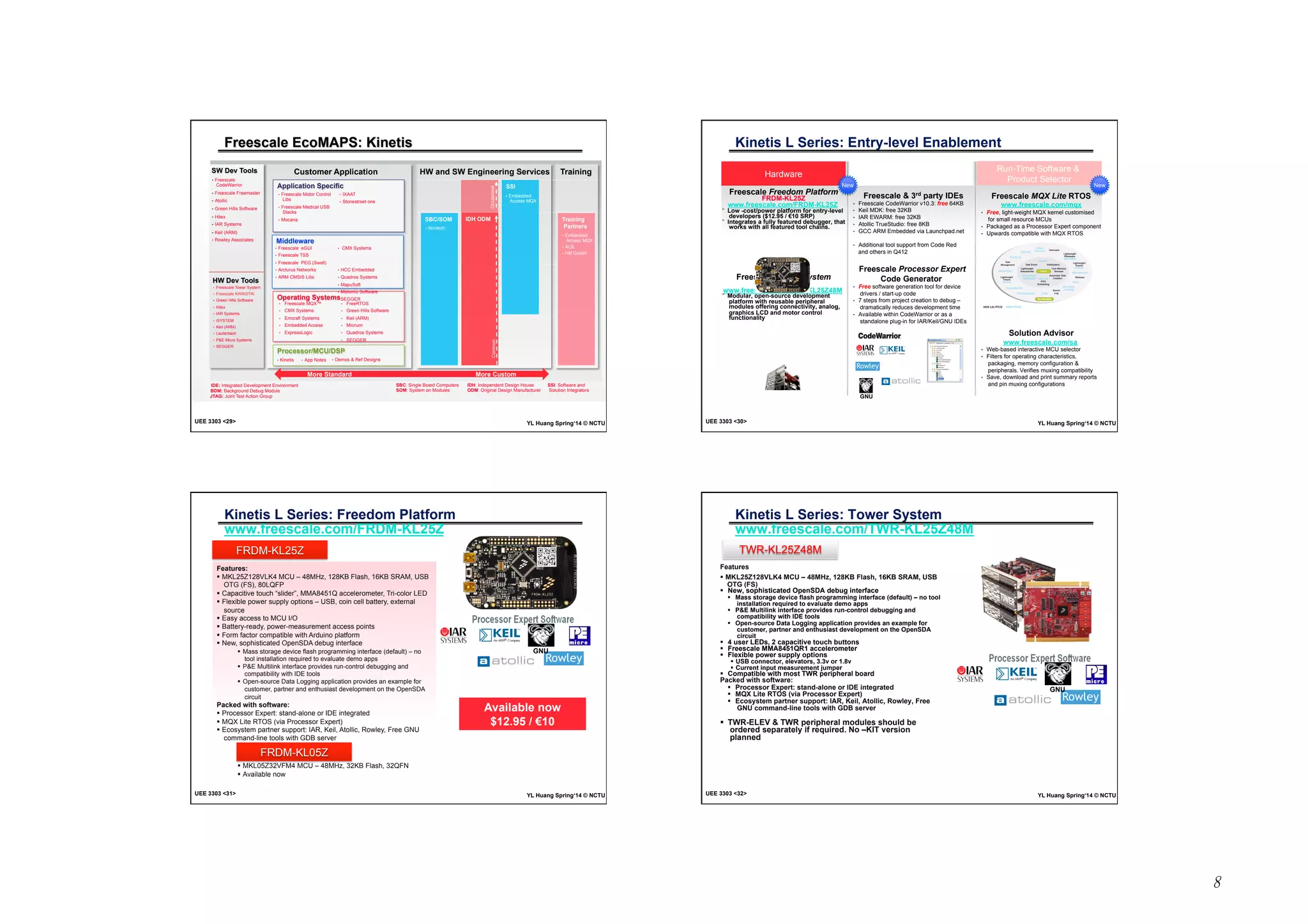
Different ARM cores: StrongARM vs. XscaleĎ
CatchĎ Tightly
Couple
MemoryĎ
Memory
Mangem
entĎ
AHBĎ Thumb Ď DSP Ď Jazelle Ď
Strong
ARM Ď
16K/8K Ď xĎ MMU Ď N/A Ď xĎ xĎ xĎ
XScale Ď 32K/32K Ď xĎ MMU Ď N/A Ď vĎ vĎ xĎ
UEE 3303 <9> YL Huang Spring ‘14 © NCTU
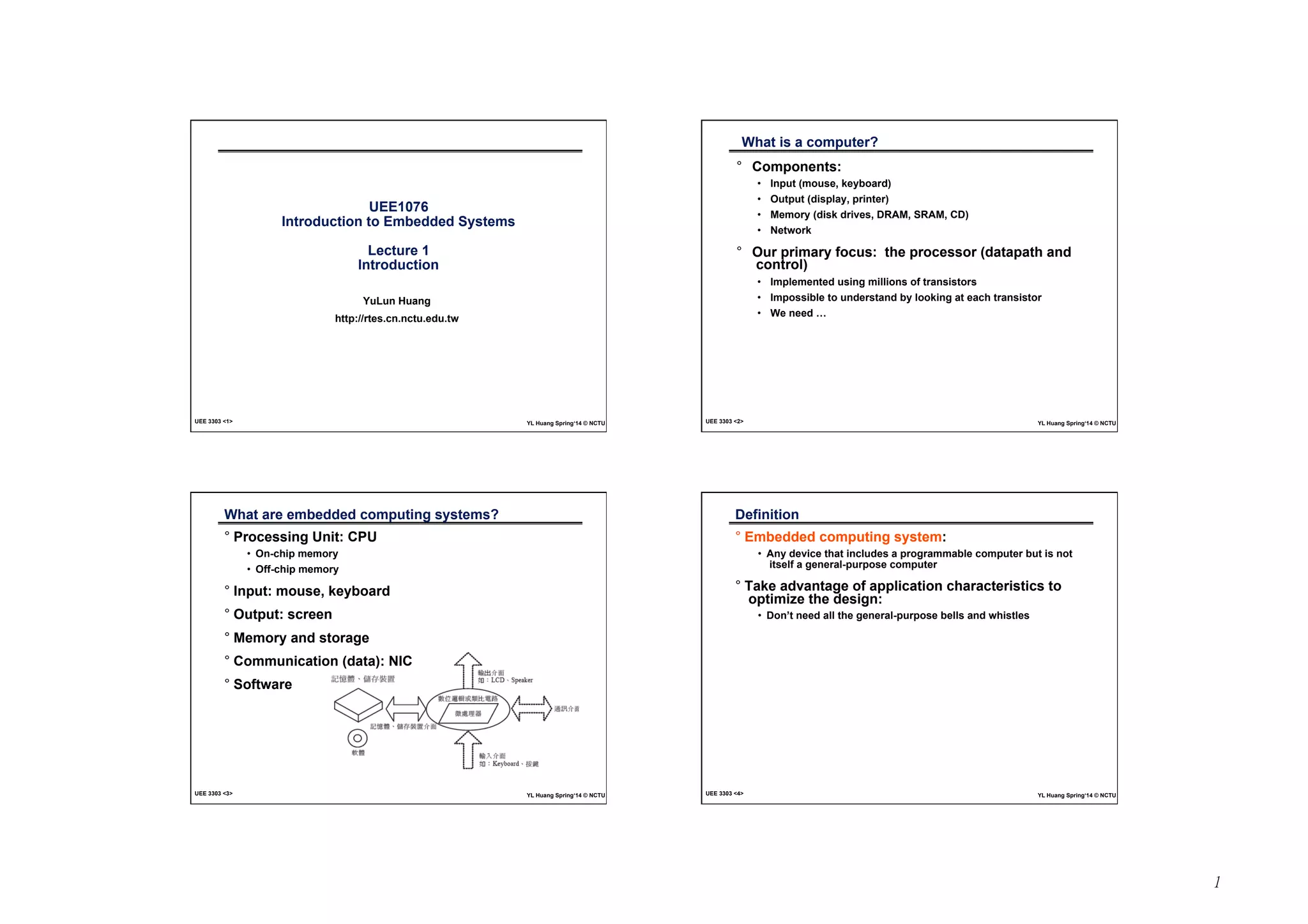
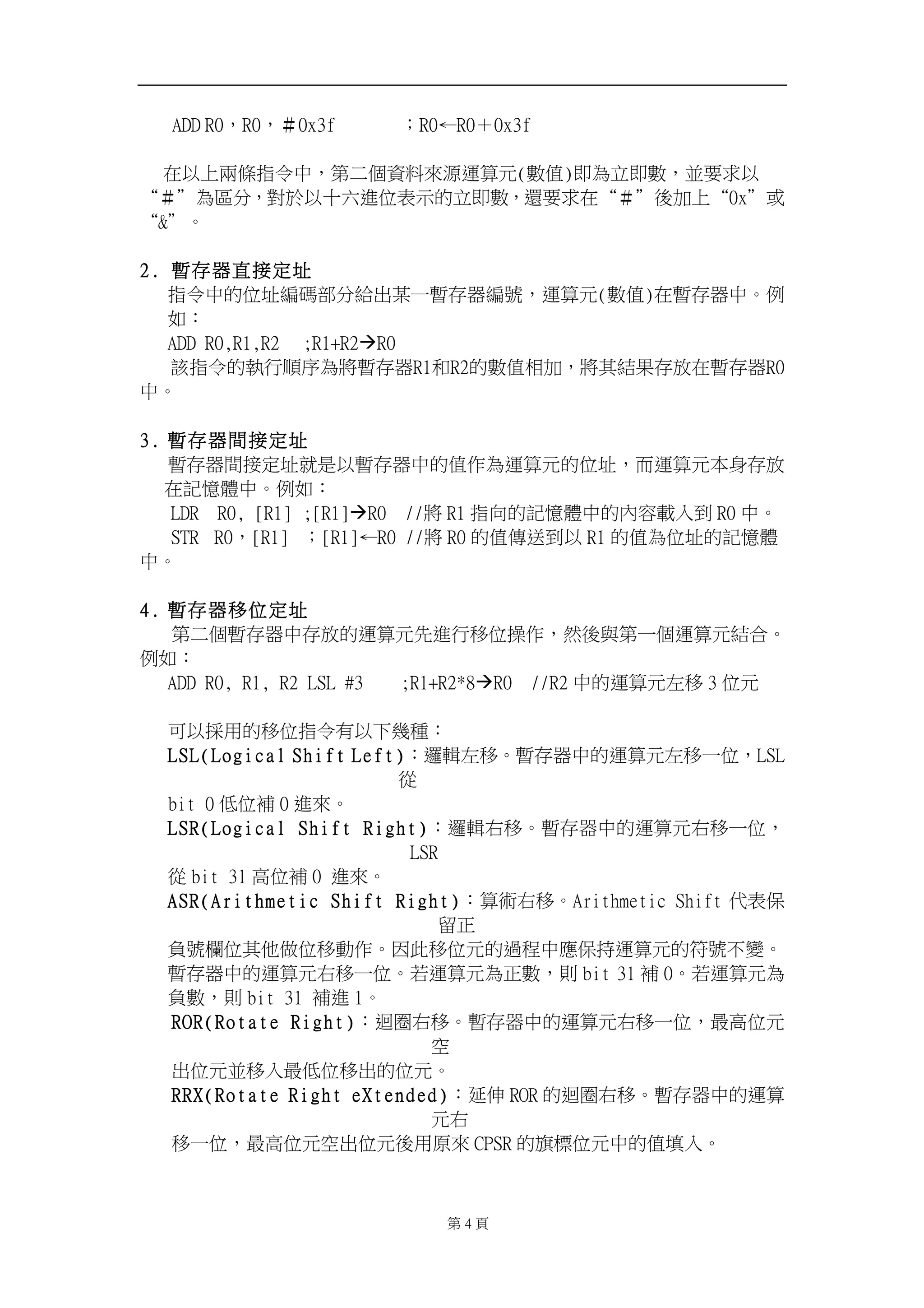
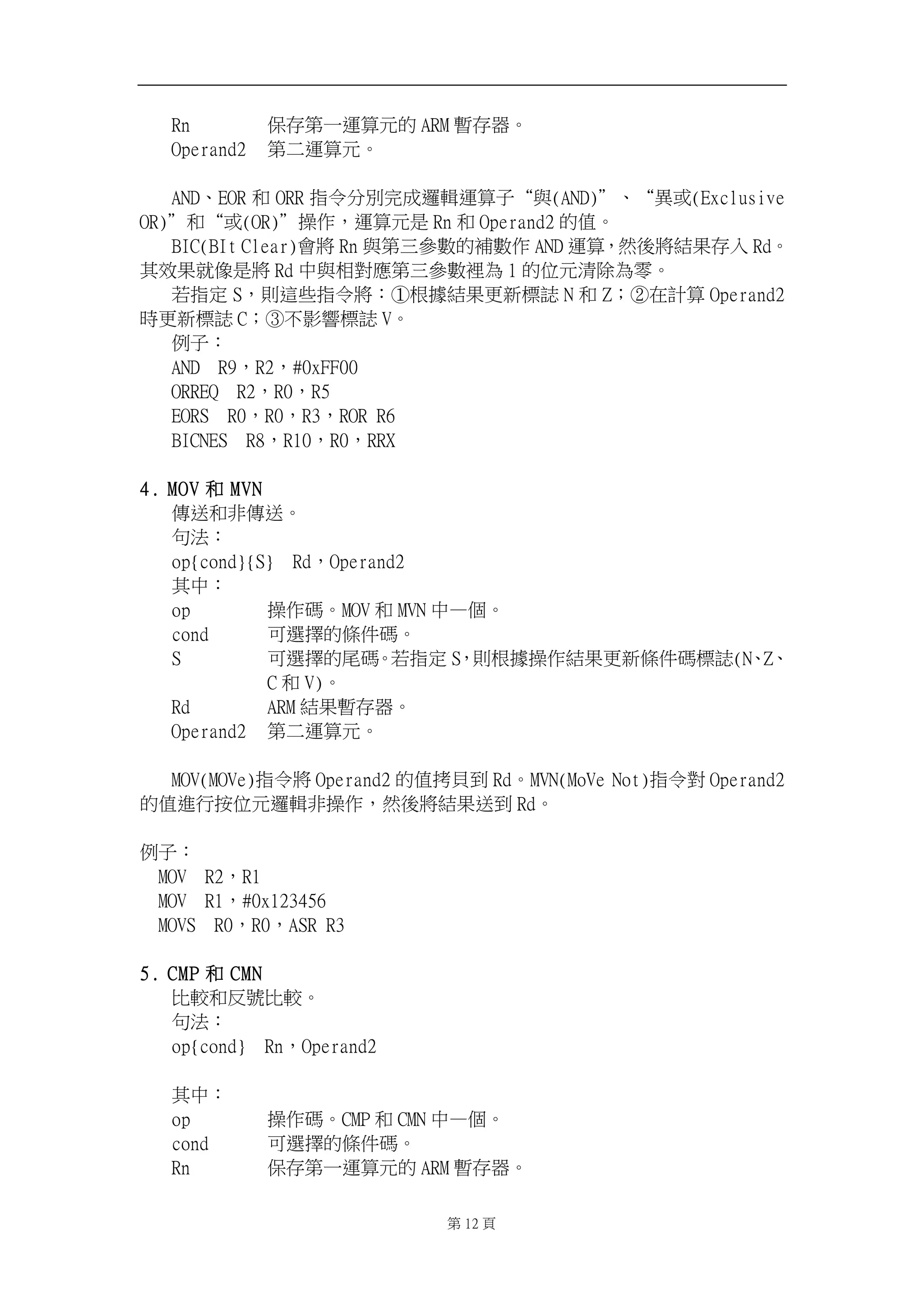
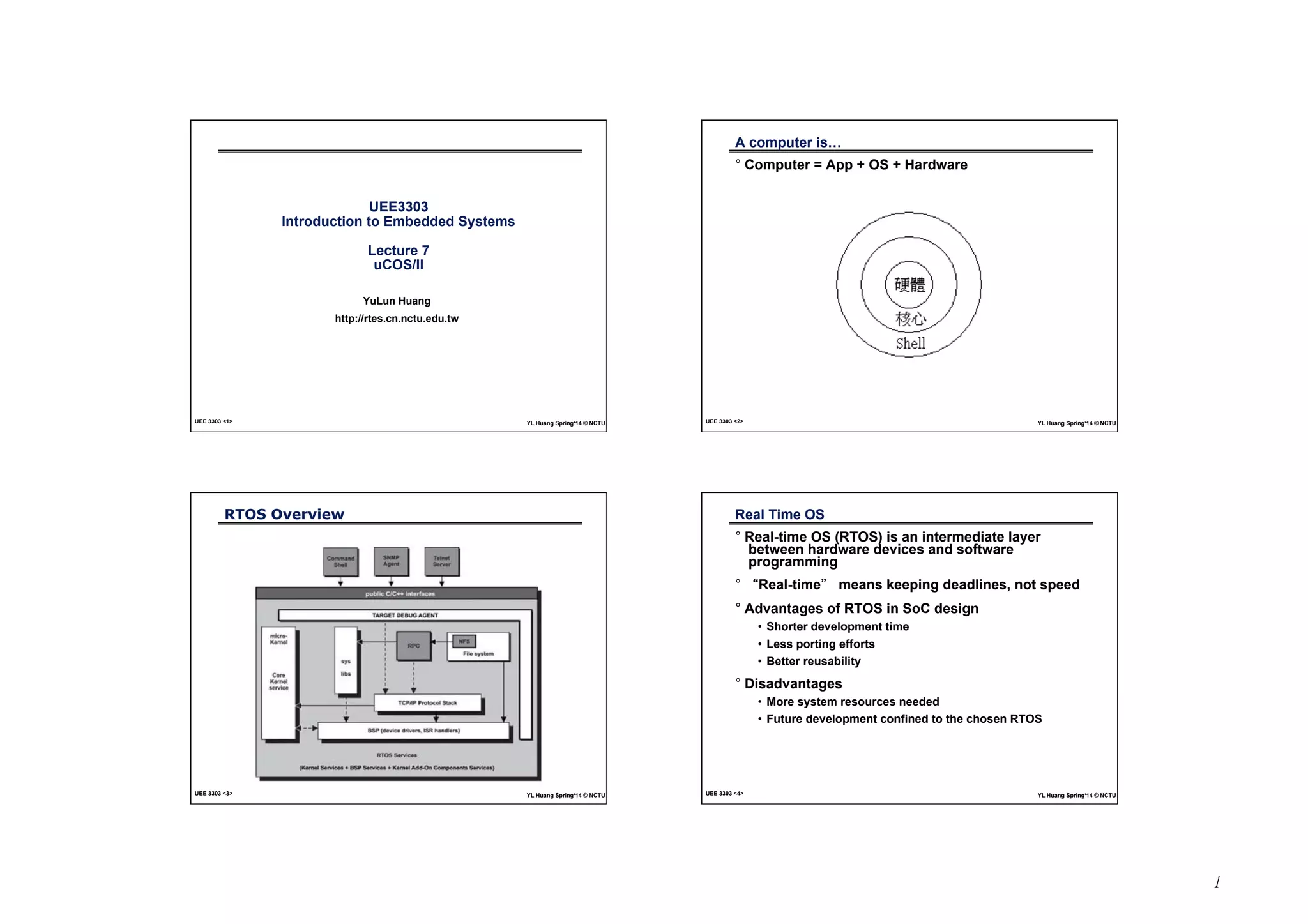
ARM ArchitectureĎ
° 7 modes
• usr – normal execution
• sys – privileged OS tasks
• fiq – fast interrupt
• irq – general interrupt
• svc – protected mode for OS
• abt – vir mem (mem protect)
• und – for s/w emulation
° 37 registers
• 30: general purpose
• 6: status
• 1: program counter
UEE 3303 <10> YL Huang Spring ‘14 © NCTU
ModesĎ
ModeĎ CodeĎ DescriptionĎ
User (usr)Ď 10000Ď Normal mode; only condition flags in cpsr
can be changedĎ
FIQ (fiq)Ď 10001Ď Fast interruptĎ
IRQ (irq)Ď 10010Ď Normal interruptĎ
Supervisor (svc)Ď 10011Ď OS kernelĎ
Abort (abt)Ď 10111Ď Memory protectionĎ
Undefined (und)Ď 11011Ď Software emulationĎ
System (sys)Ď 11111Ď Normal mode, but be able to r/w cpsrĎ
UEE 3303 <11> YL Huang Spring ‘14 © NCTU
RegistersĎ
° ARM 嗽䎮☐㚱ġ37ġᾳ㙓⬀☐炻⊭㊔
• [15] 30ᾳ忂䓐㙓⬀☐
• [1] 1 PC
• [1] 6ġᾳ䉨ン㙓⬀☐烉CPSR x 1 + SPSR x 5
° ARM 㚱ġ7ġ䧖ⶍἄ㧉⺷
• 㭷ᶨ䧖㧉⺷ᶳ悥㚱ᶨ䳬䚠⮵䘬㙓⬀☐冯ᷳ⮵ㅱ
UEE 3303 <12> YL Huang Spring ‘14 © NCTU](https://image.slidesharecdn.com/random-140905124409-phpapp02/75/slide-10-2048.jpg)
![7
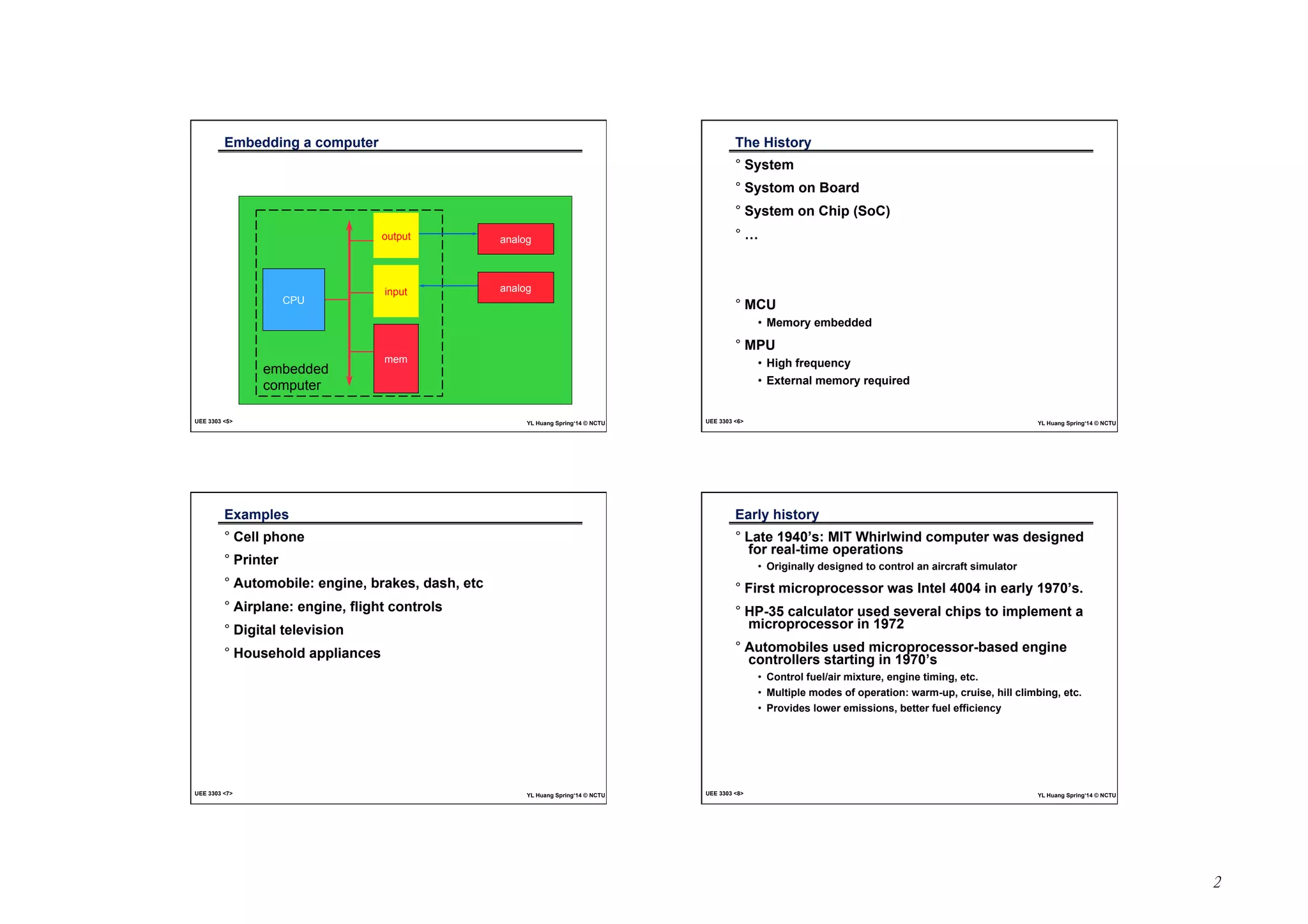
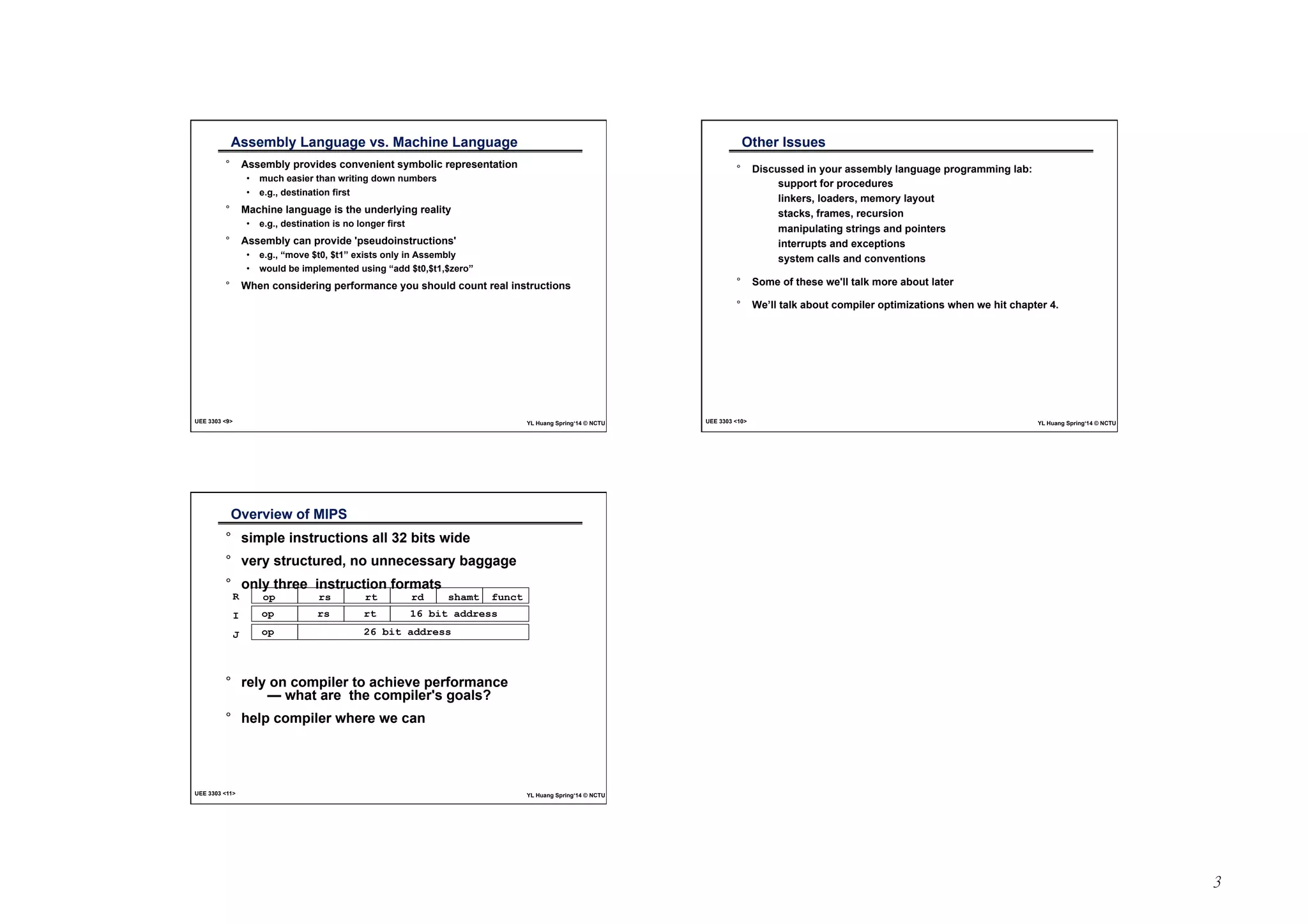
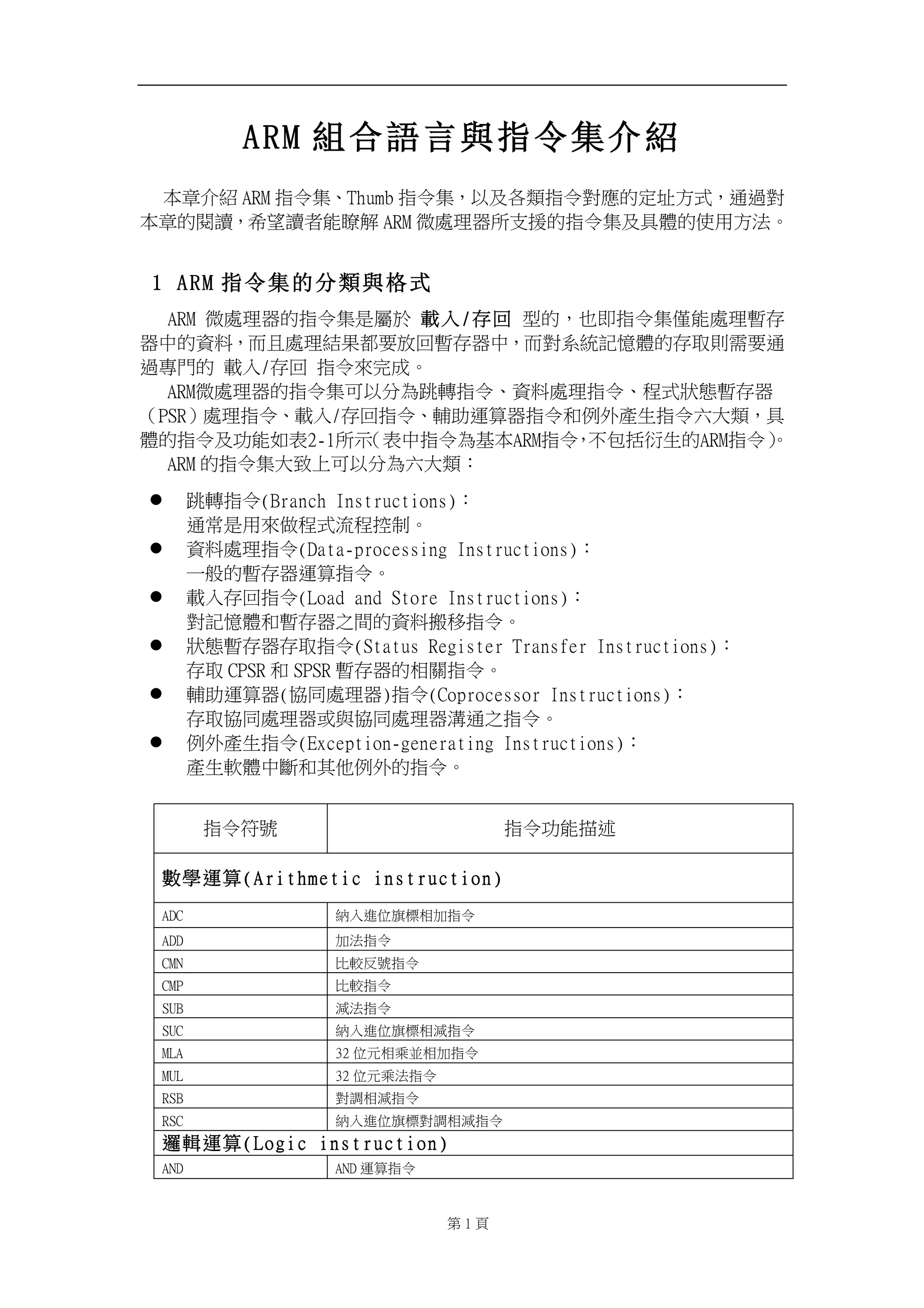
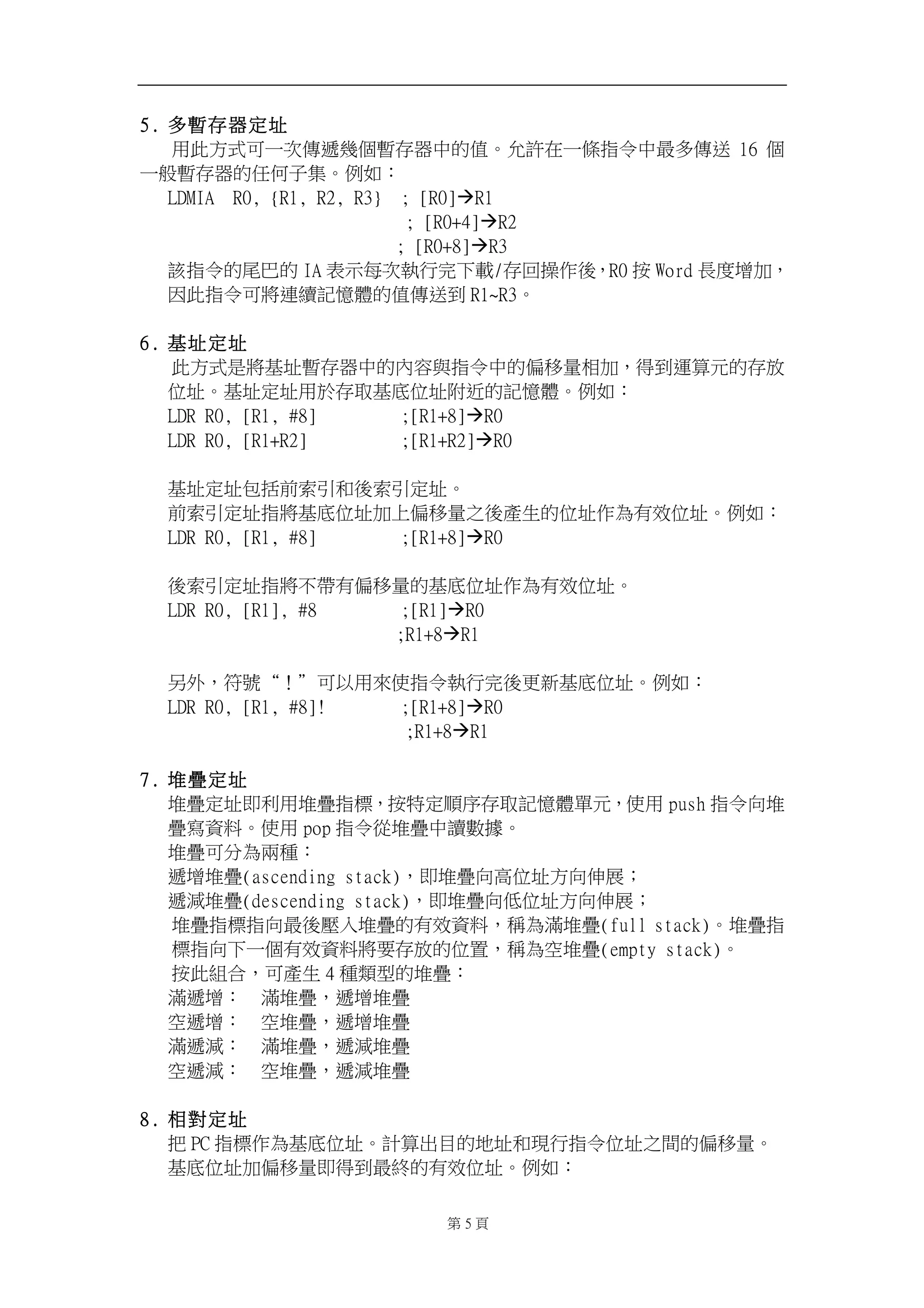
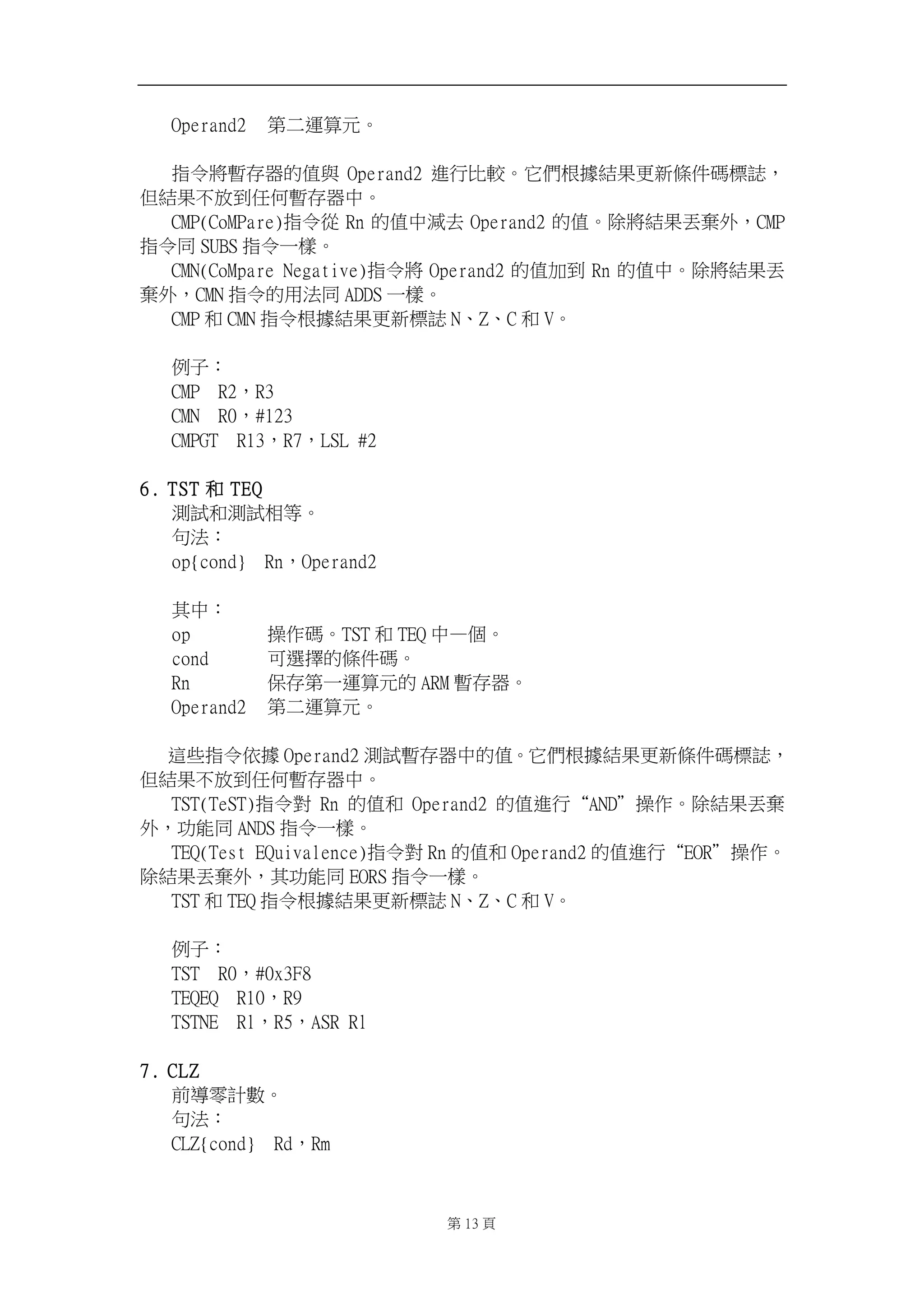
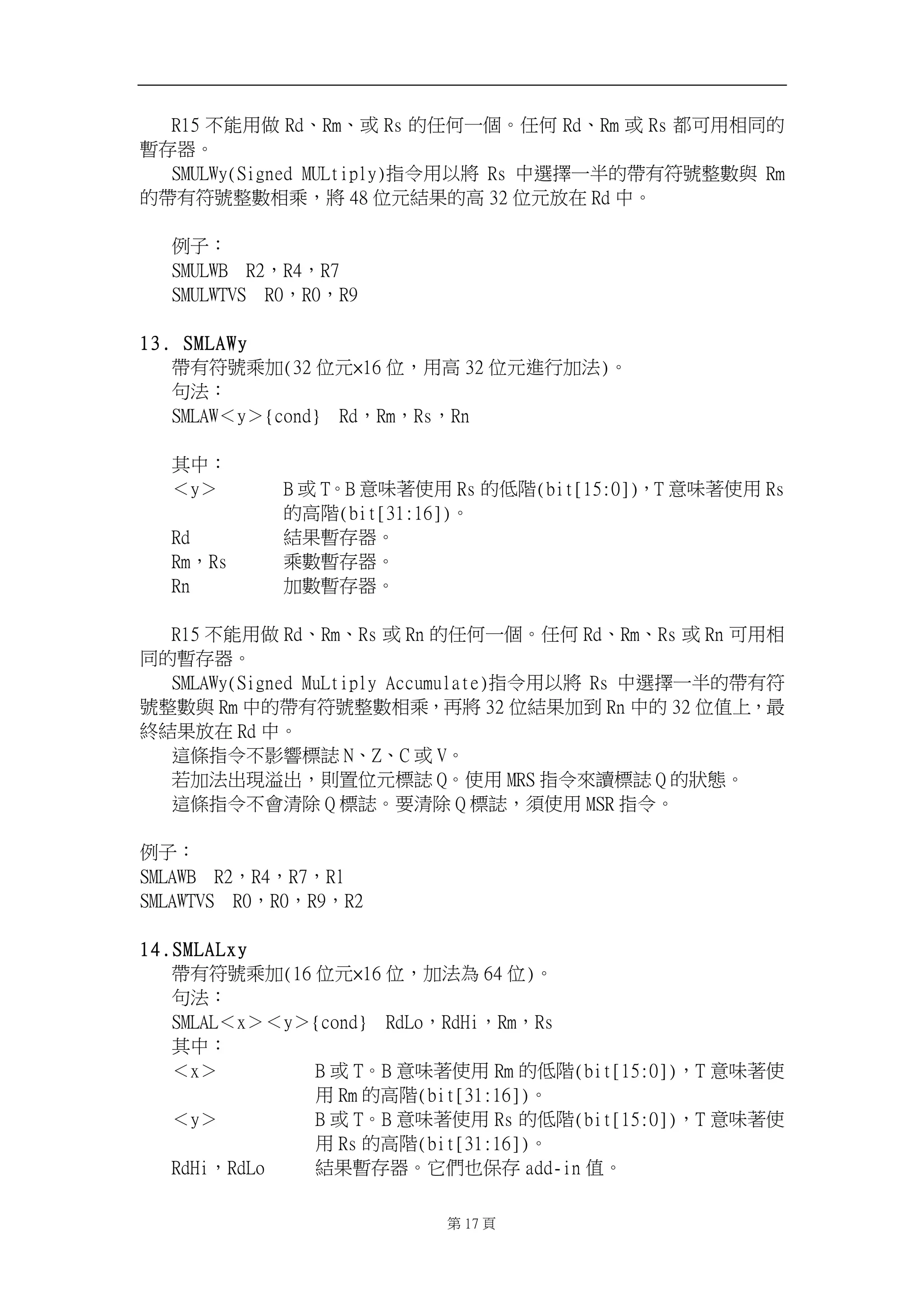
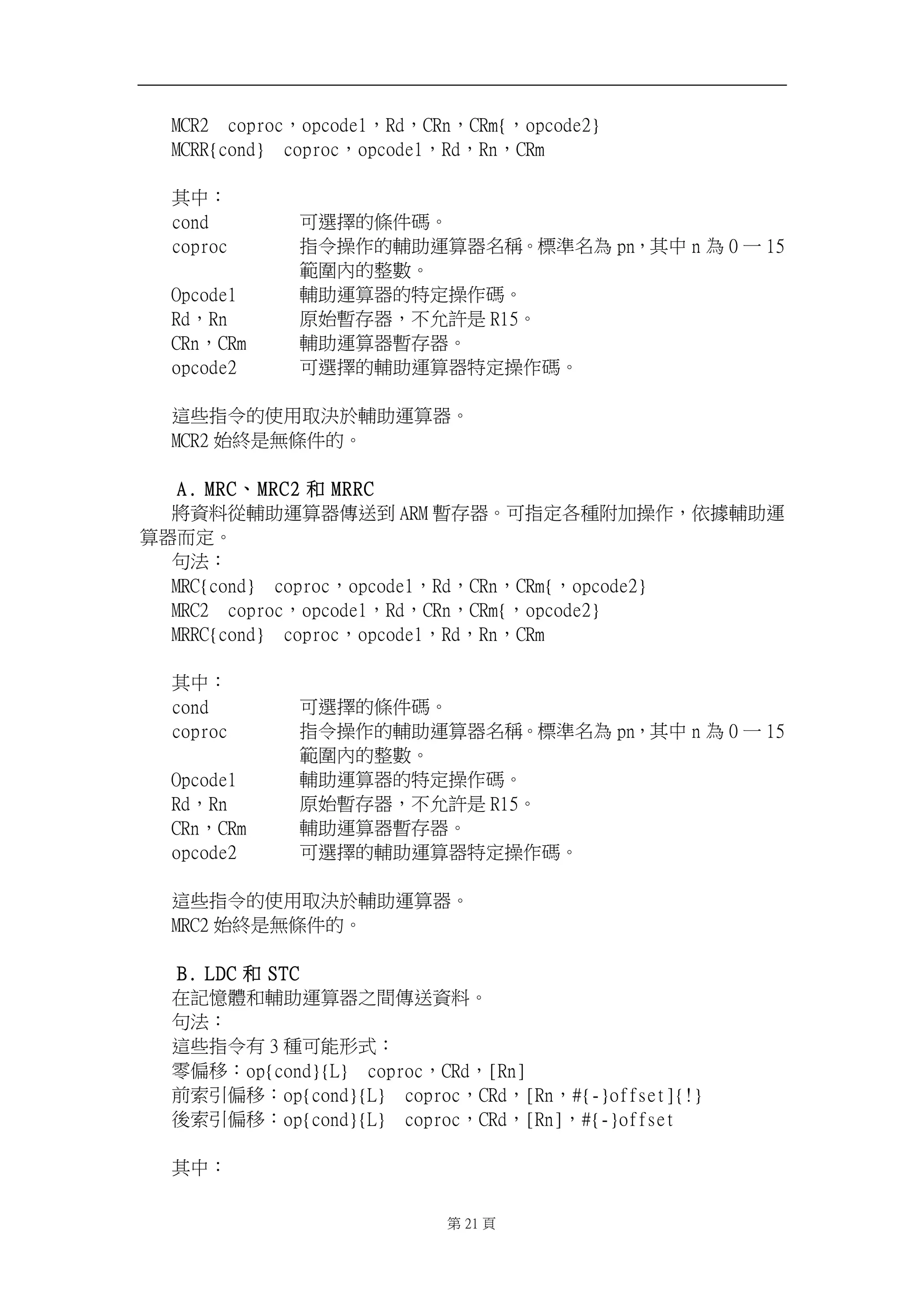
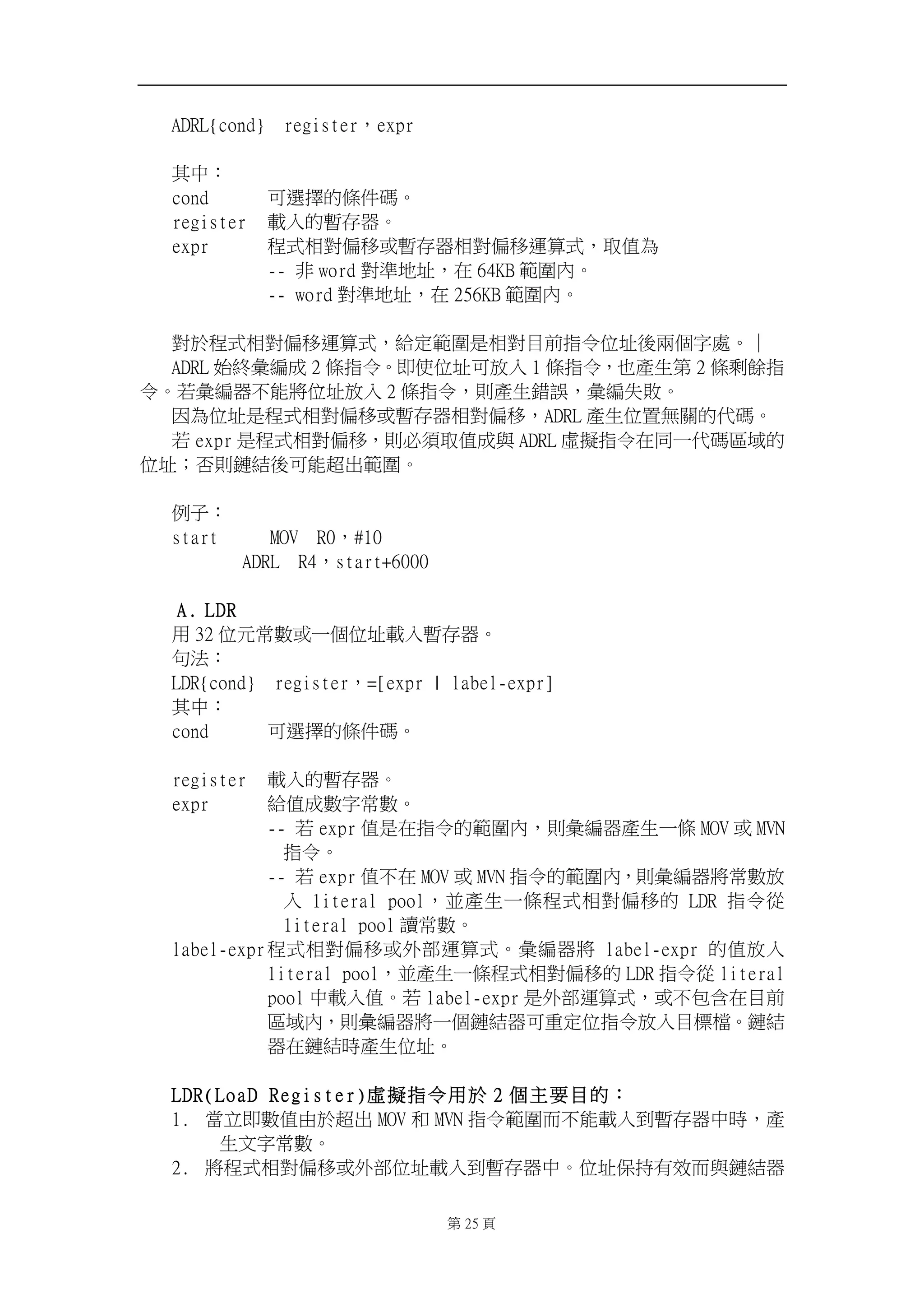
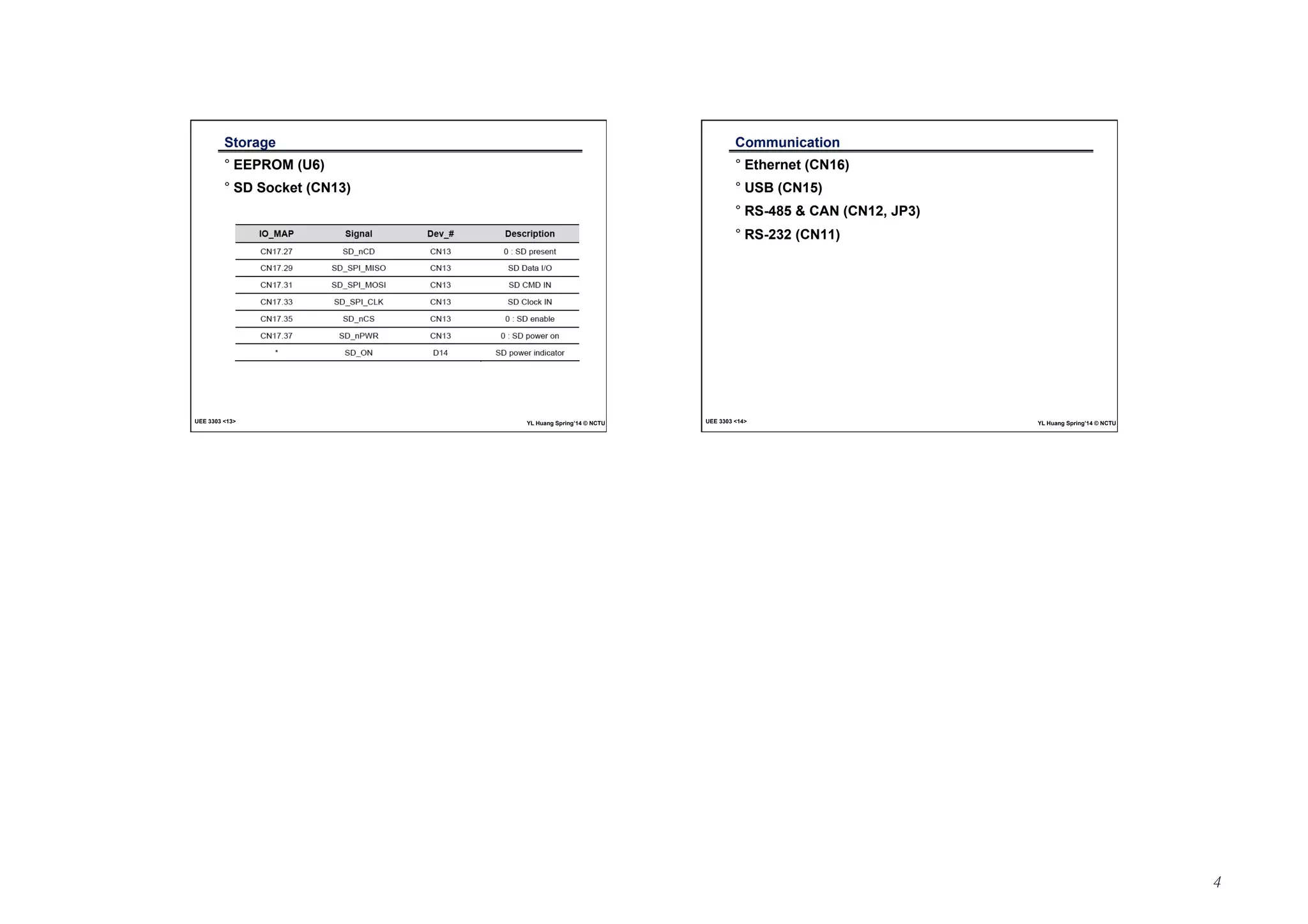
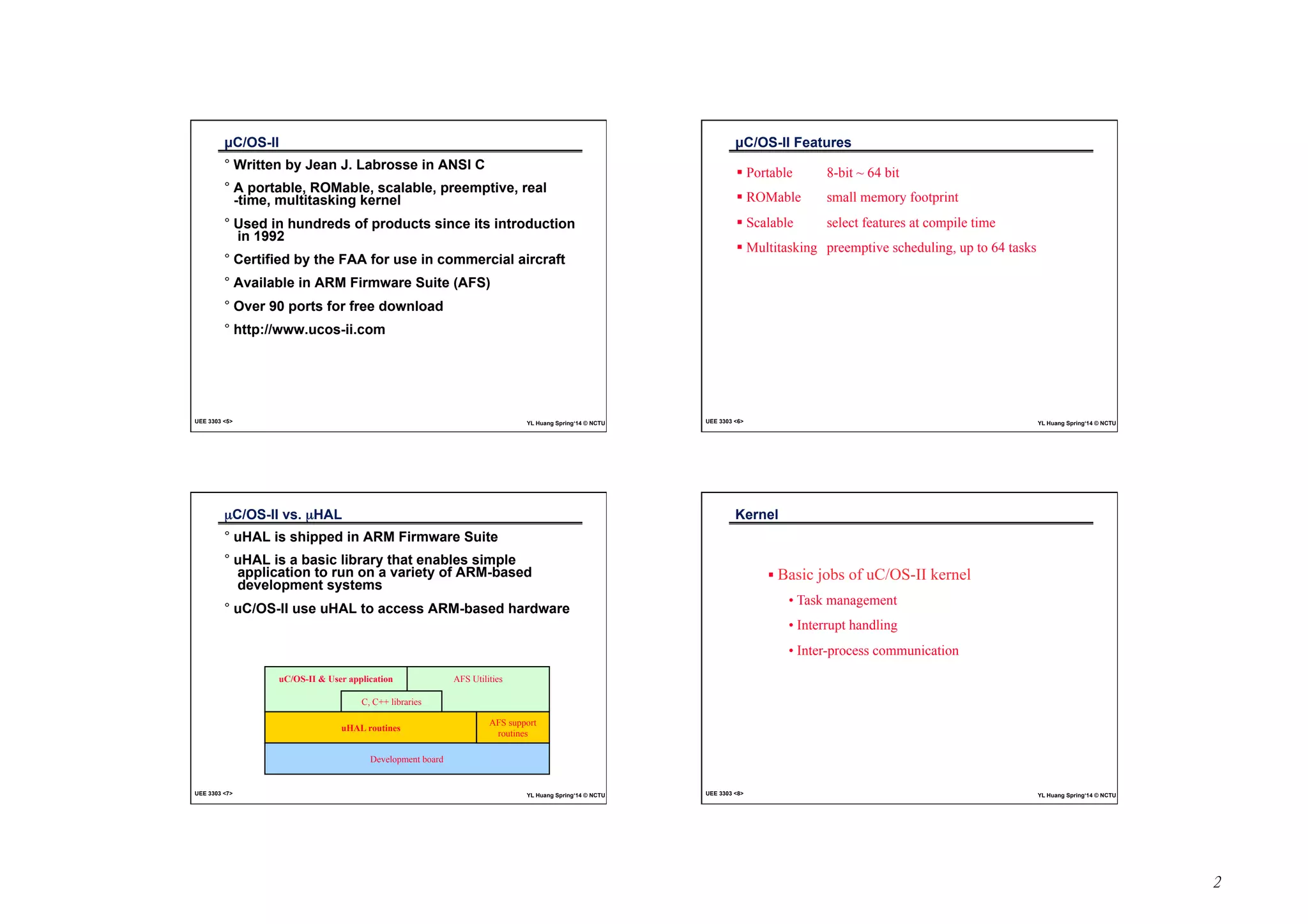
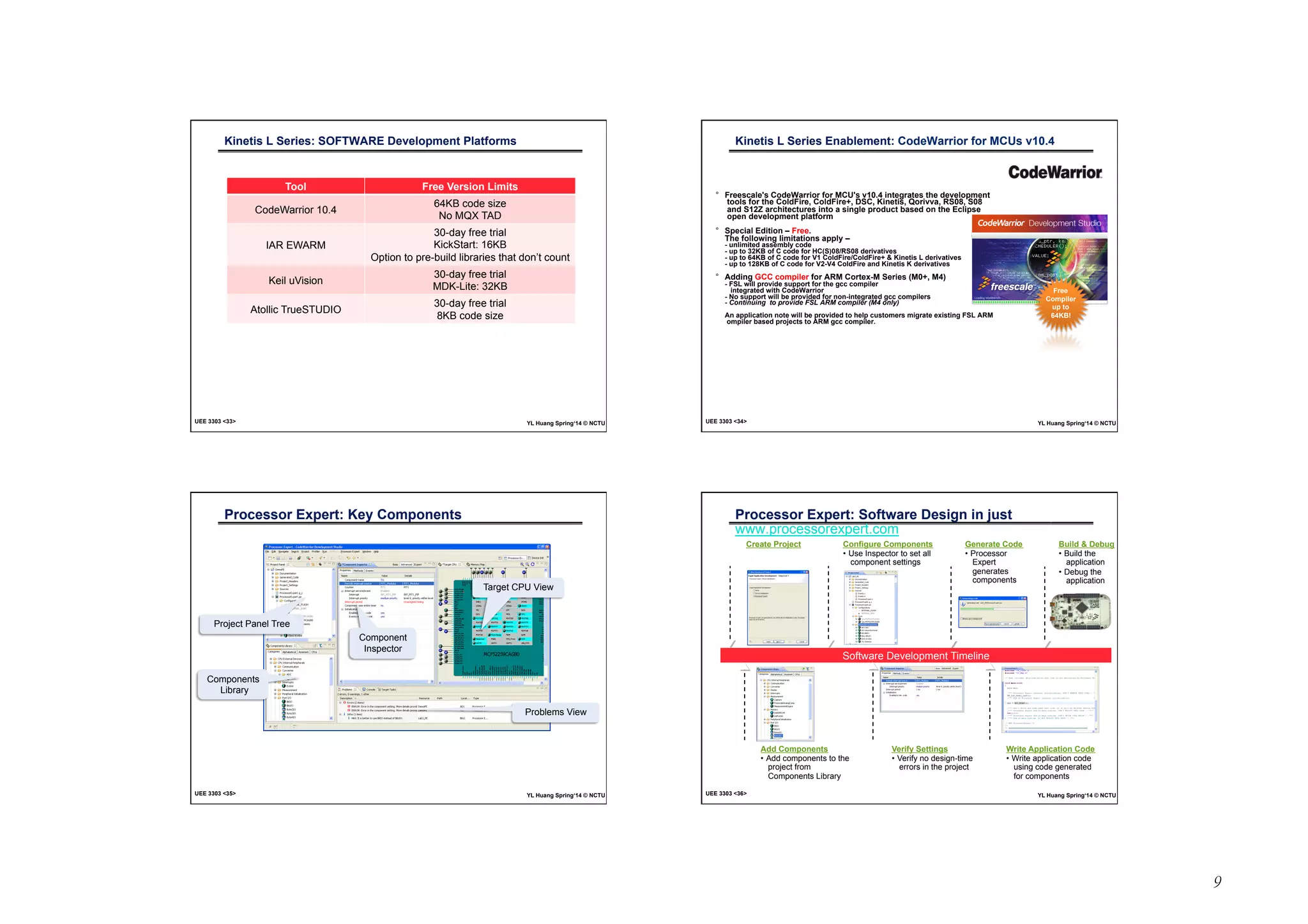
Types of ARM InstructionsĎ
° Arithmetic operations
° Comparisons (no results - just set condition codes)
° Logical operations
° Data movement between registersĎ
UEE 3303 <25> YL Huang Spring ‘14 © NCTU
Arithmetic OperationsĎ
° Syntax
• <Operation>{<cond>}{S} Rd, Rn, Operand2
° Operations are
• ADD operand1 + operand2
• ADC operand1 + operand2 + carry
• SUB operand1 - operand2
• SBC operand1 - operand2 + carry -1
° Examples
ADD r0, r1, r2
SUBGT r3, r3, #1
UEE 3303 <26> YL Huang Spring ‘14 © NCTU
ComparisonsĎ
° The only effect of the comparisons is to
• UPDATE THE CONDITION FLAGS. (no need to set S bit.)
° Syntax:
• <Operation>{<cond>} Rn, Operand2
° Operations are:
• CMP operand1 - operand2, but result not written
• CMN operand1 + operand2, but result not written
• TST operand1 AND operand2, but result not written
• TEQ operand1 EOR operand2, but result not written
° Examples:
CMP r0, r1
TSTEQ r2, #5Ď
UEE 3303 <27> YL Huang Spring ‘14 © NCTU
Logical OperationsĎ
° Syntax:
• <Operation>{<cond>}{S} Rd, Rn, Operand2
° Operations are:
• AND operand1 AND operand2
• EOR operand1 EOR operand2
• ORR operand1 OR operand2
• BIC operand1 AND NOT operand2 [ie bit clear]
° Examples
AND r0, r1, r2
BICEQ r2, r3, #7
EORS r1,r3,r0Ď
UEE 3303 <28> YL Huang Spring ‘14 © NCTU](https://image.slidesharecdn.com/random-140905124409-phpapp02/75/slide-14-2048.jpg)
![10
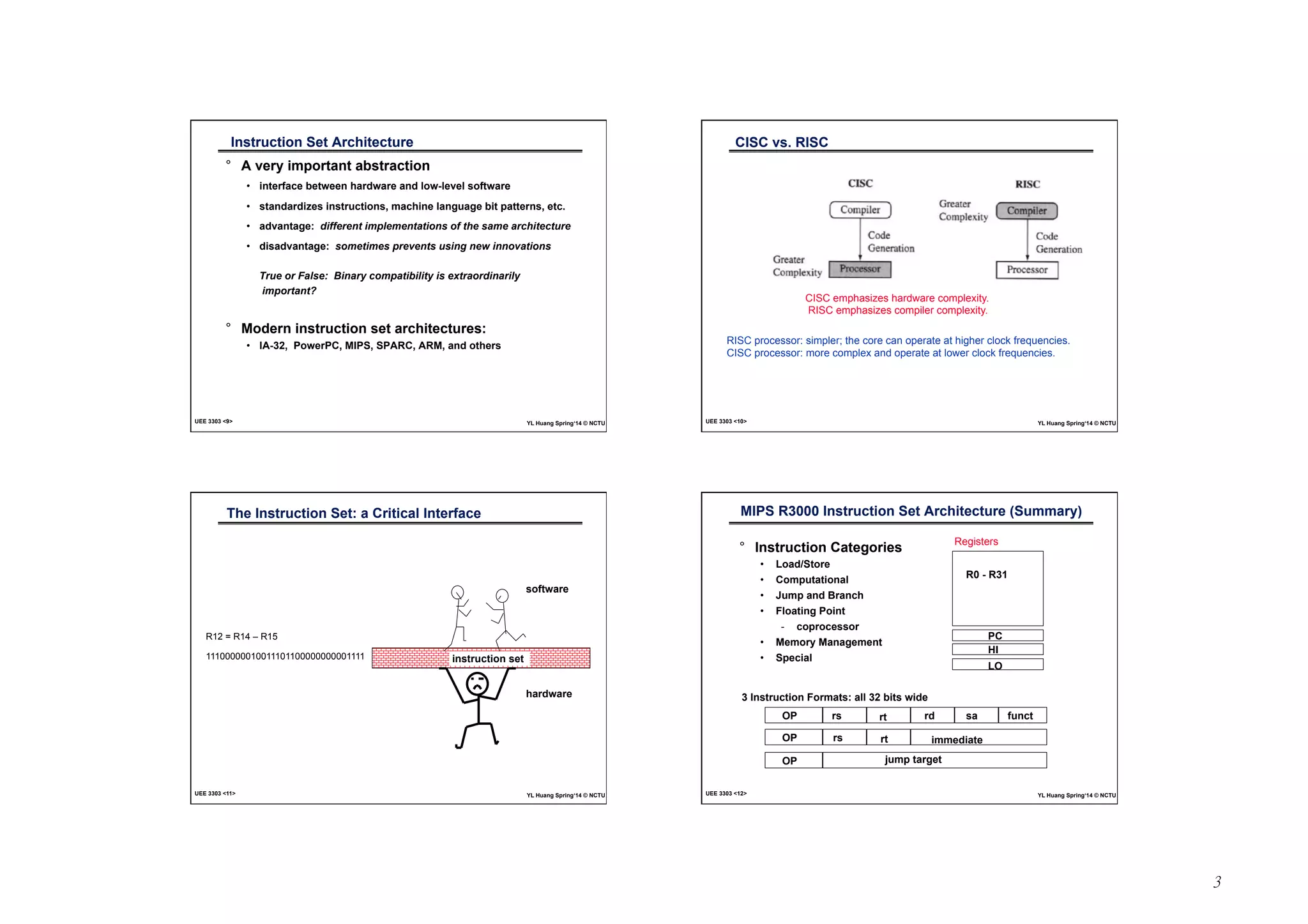
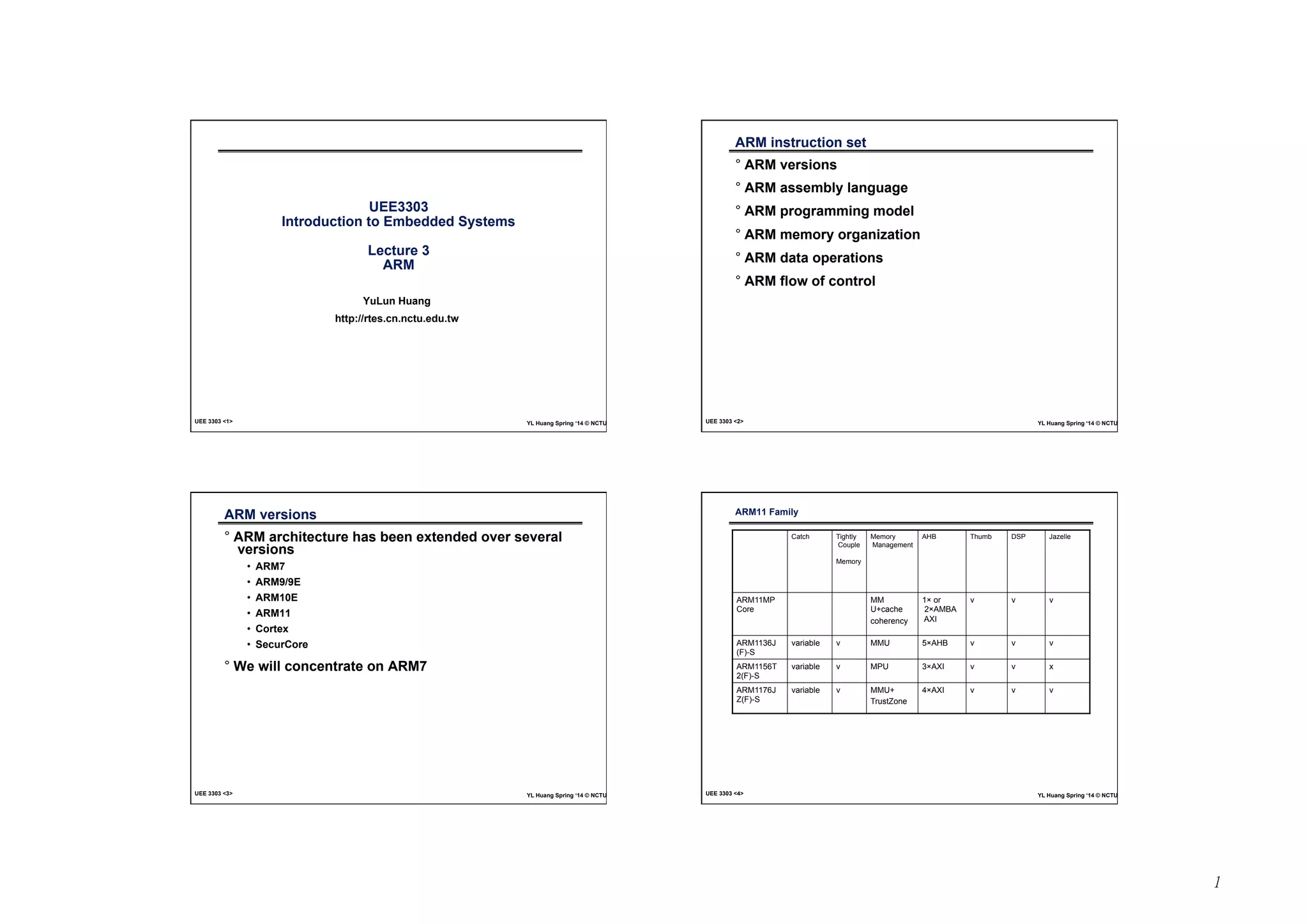
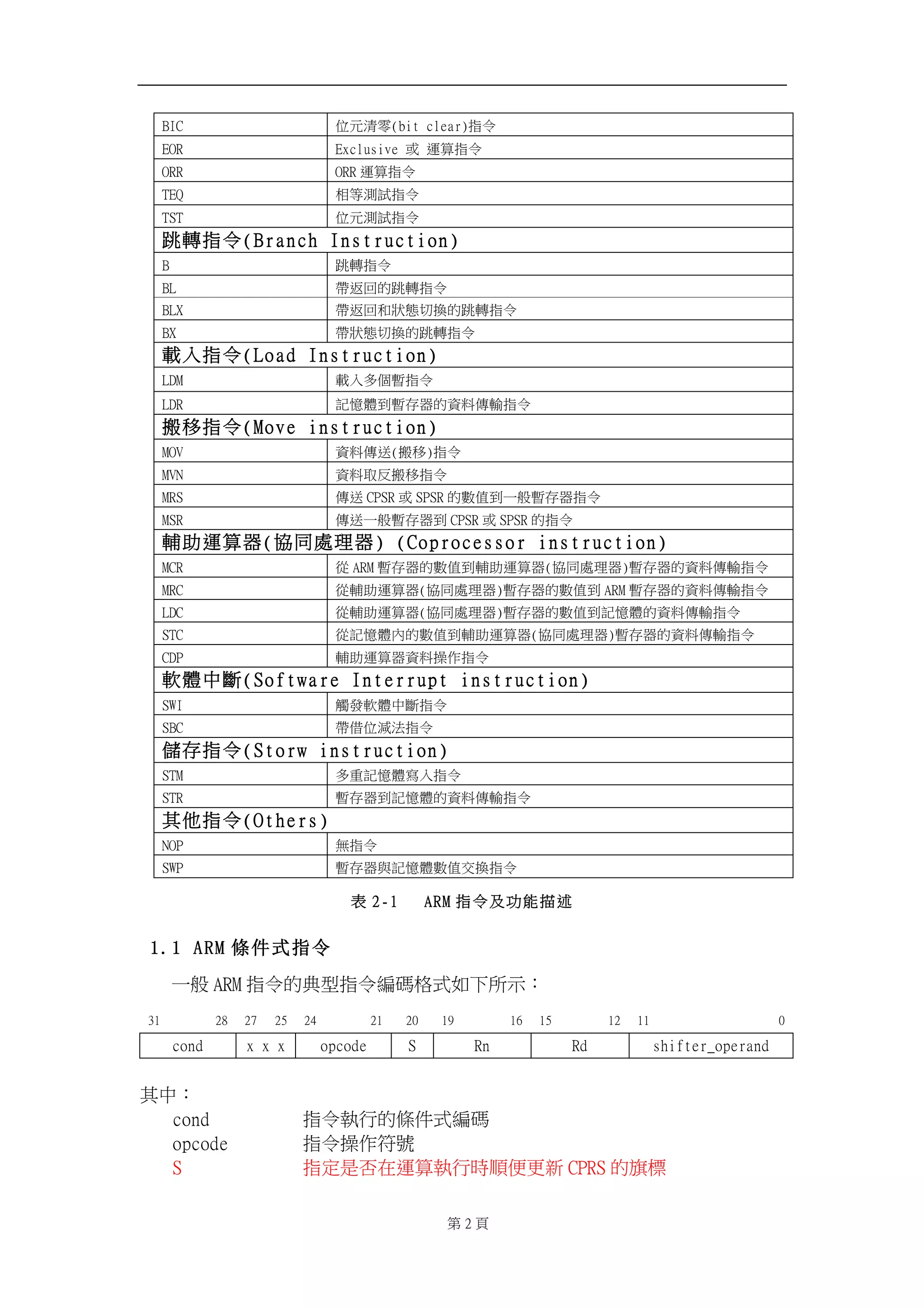
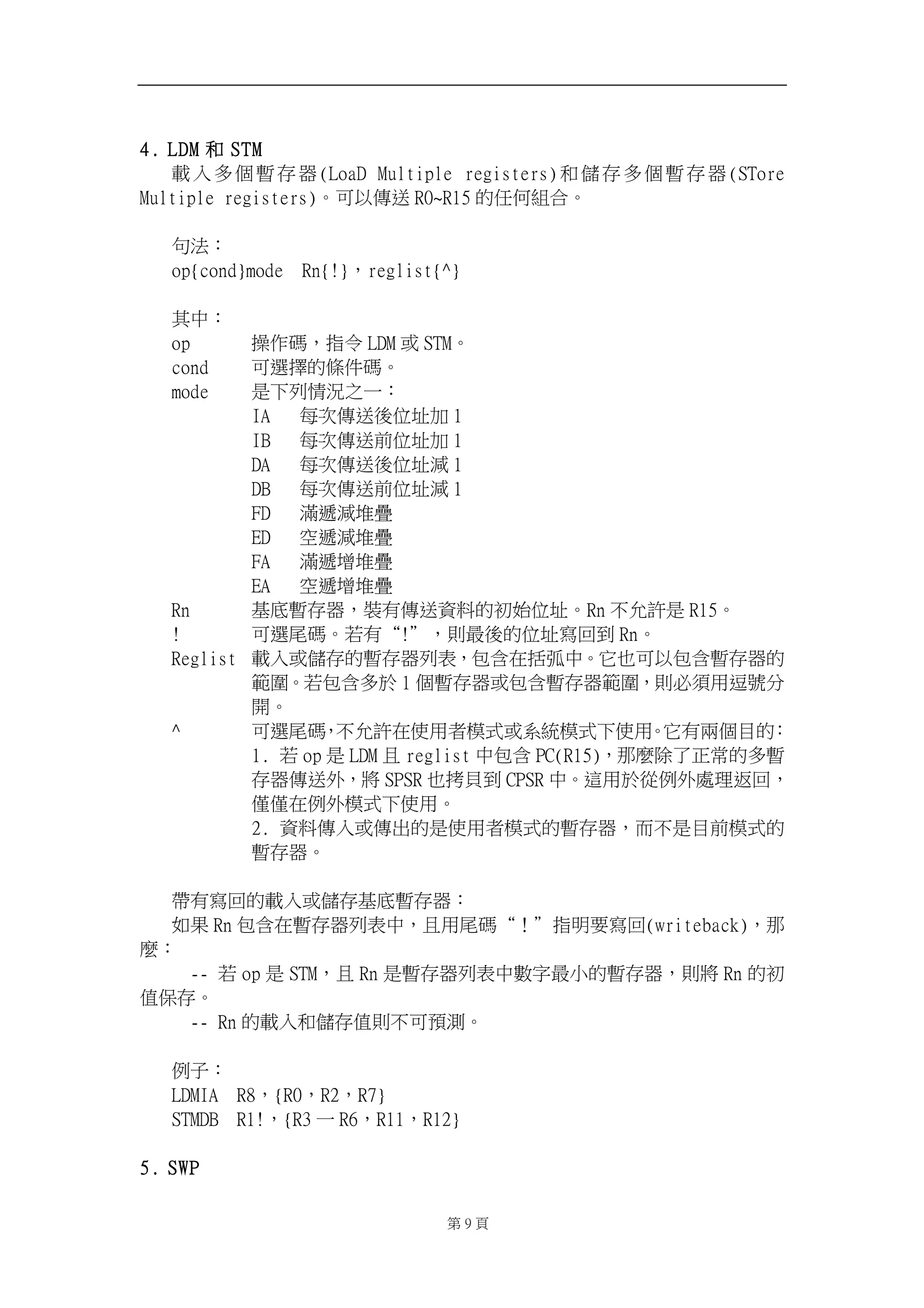
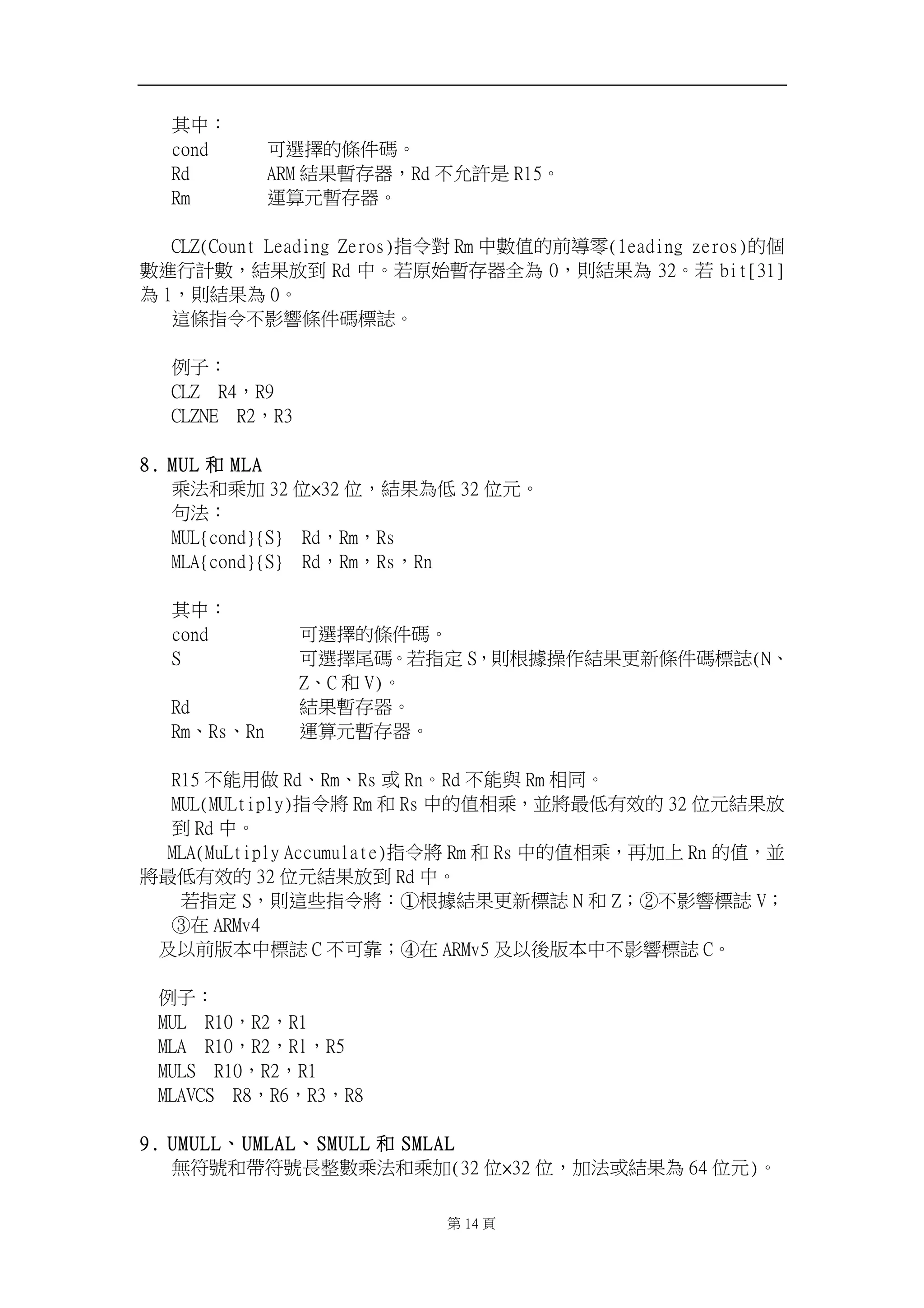
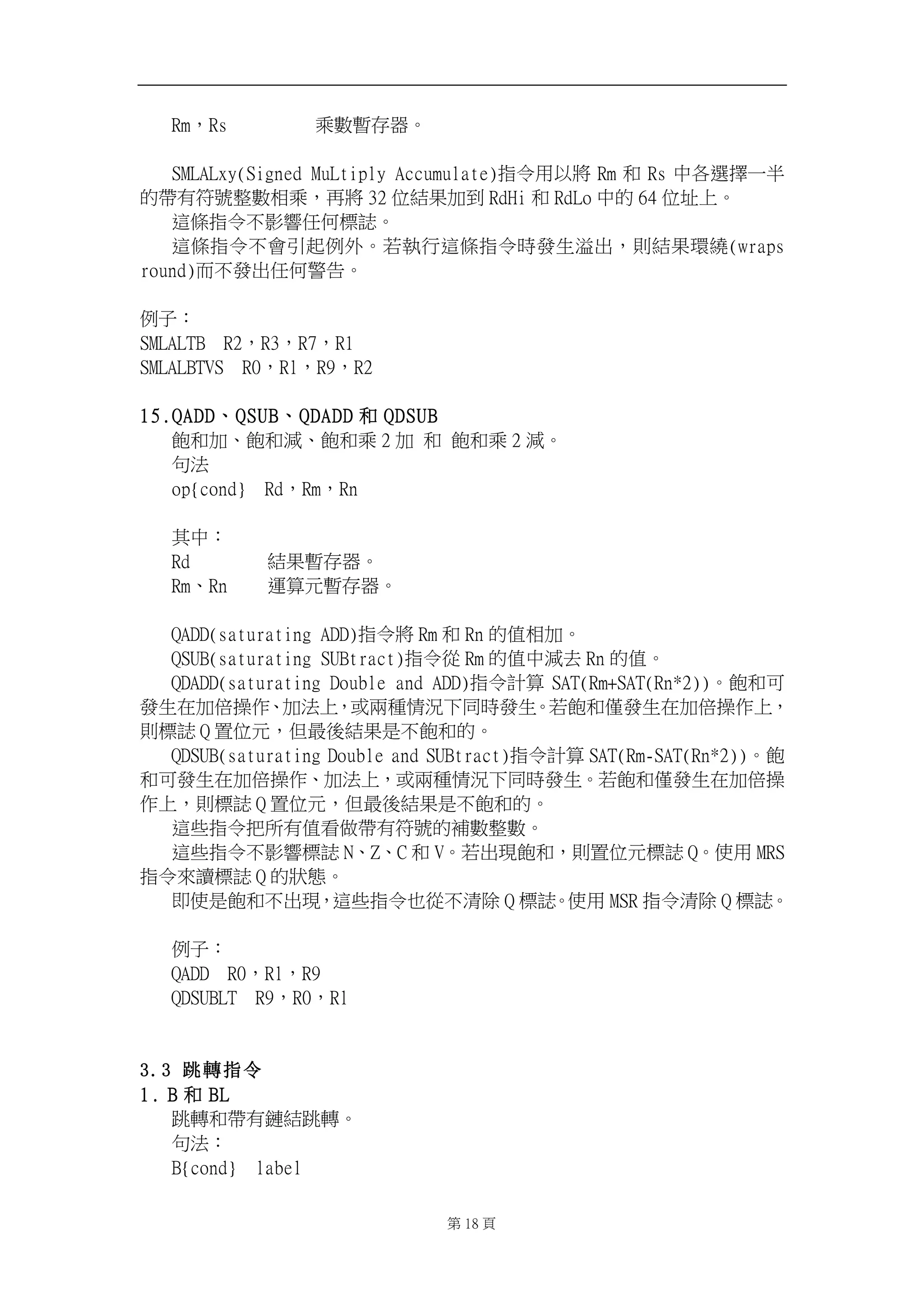
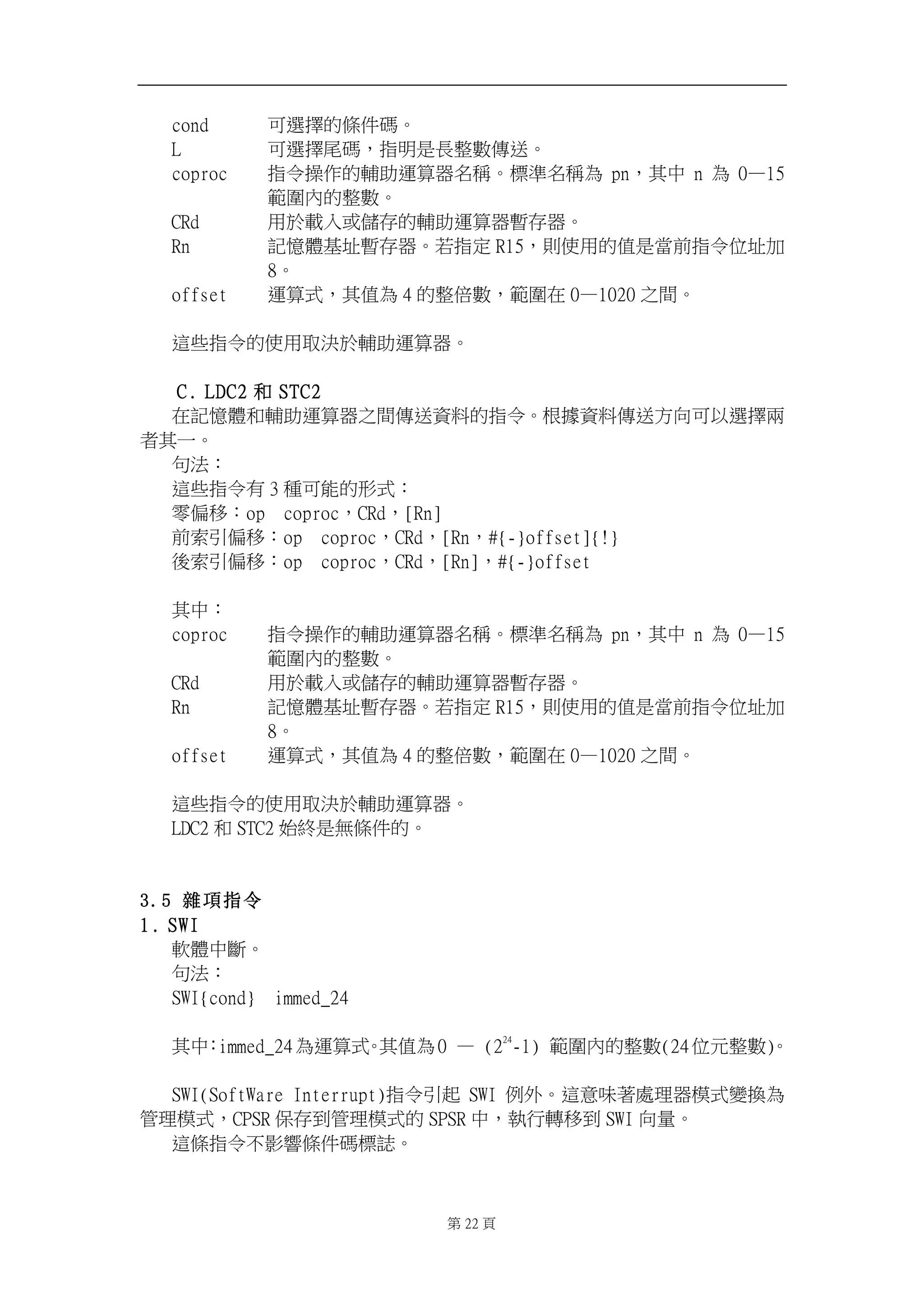
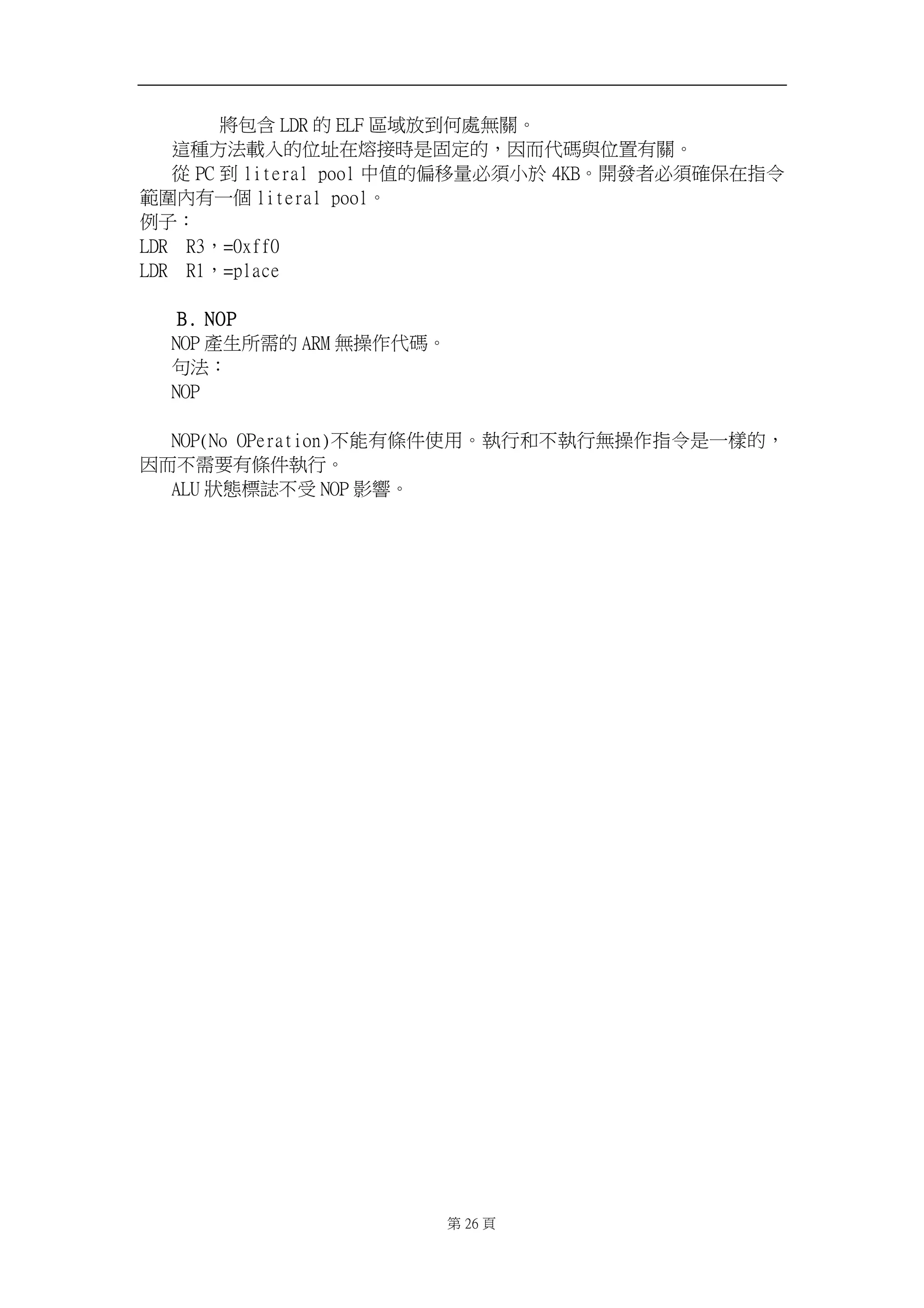
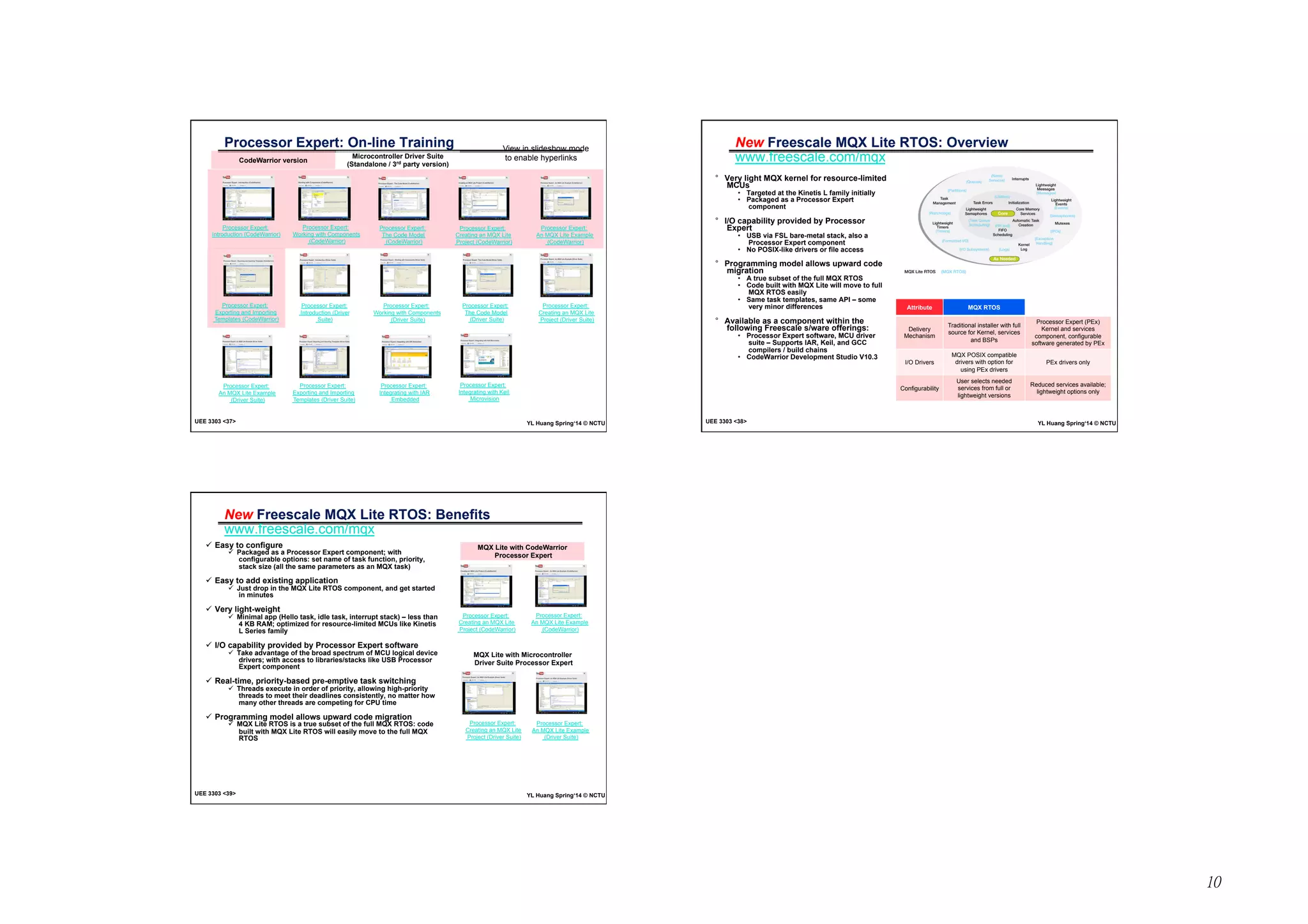
Our QEMU supports..Ď
codeĎ targetĎ codeĎ targetĎ
syborgĎ Symbian Virtual
PlatformĎ
borzoiĎ PDA, PXA270Ď
musicpalĎ Marvell 88w8618Ď terrierĎ PDA, PXA270Ď
mainstoneĎ PXA27xĎ connexĎ Gumstix PXA255Ď
N800, n810Ď Nokia N800/N810 tabletĎ verdexĎ Gumstix PXA270Ď
cheetahĎ Palm TungstenĎ lm3s811evbĎ StellarisĎ
sx1Ď Siemens SX1 v2Ď lm3s6965evbĎ StellarisĎ
sx1-v1Ď Siemens SX1 v1Ď realview-ebĎ ARM926Ď
tosaĎ PDA, PXA255Ď realview-eb-mpcore
Ď
ARM11Ď
akitaĎ PDA, PXA270Ď realview-pb-a8Ď Cortex-A8Ď
spitzĎ PDA, PXA270Ď versatilepbĎ …Ď
UEE 3303 <37> YL Huang Spring ‘14 © NCTU
忚ℍġqemu ᷳ⼴Ď
° ⛐➟埴ġQEMU ⼴炻㚫↢䎦ˬ(qemu)˭ġ䘬㍸䣢ˤ⛐忁ᾳ㍸䣢ᶳ⎗ẍ廠ℍ
ᶨṃ㊯ẌἮ㑵ἄġQEMUˤ
° QEMU ㊯Ẍ
• help ㆾġ? [cmd]: 栗䣢婒㖶㔯⫿Ď
• info: 栗䣢䲣䴙䉨ンˤἳ烉Ď
• info network - 栗䣢䵚嶗ṳ朊䉨ンĎ
• info block - 栗䣢⃚⬀墅伖䉨ンĎ
• info registers - 栗䣢ġCPU 䘬㙓⬀☐䉨ンĎ
• info history - 栗䣢㬟⎚㊯ẌĎ
• What else?
UEE 3303 <38> YL Huang Spring ‘14 © NCTU
infoĎ
° info version -- show the version of QEMU
° info network -- show the network state
° info chardev -- show the character
devices
° info block -- show the block devices
° info blockstats -- show block device
statistics
° info registers -- show the cpu registers
° info cpus -- show infos for each CPU
° info history -- show the command line
history
° info irq -- show the interrupts statistics (if
available)
° info pic -- show i8259 (PIC) state
° info pci -- show PCI info
° info jit -- show dynamic compiler info
° info kvm -- show KVM information
° info numa -- show NUMA information
° info usb -- show guest USB devices
° info usbhost -- show host USB devices
° info profile -- show profiling information
° info capture -- show capture information
° info snapshots -- show the currently
saved VM snapshots
° info status -- show the current VM status
(running|paused)
° info pcmcia -- show guest PCMCIA
status
° info mice -- show which guest mouse is
receiving events
° info vnc -- show the vnc server status
° info name -- show the current VM name
° info uuid -- show the current VM UUID
° info usernet -- show user network stack
connection states
° info migrate -- show migration status
° info balloon -- show balloon information
° info qtree -- show device tree
° info qdm -- show qdev device model list
° info roms -- show roms
UEE 3303 <39> YL Huang Spring ‘14 © NCTU
忚ℍġqemu ᷳ⼴Ď
° q ㆾġquit:ġ斄攱㧉㒔☐
° eject [-f] device烉徨↢墅伖ˤġ-f 堐䣢⻟⇞徨↢
° change device filename:ġ㚜㎃㉥⍾⺷⨺橼炻⤪庇䡇䇯ㆾ䡇䇯ˤ
° screendump filename: ㇒⍾坊ⷽ䔓朊炻⃚⬀ㆸġPPM ⼙⁷ˤġlog
item1[,...]: ⮯㊯⭂䘬枭䚖ᷳġLOG ⮓ℍġ/tmp/qemu.log ᷕˤ
° savevm filename: ⮯㔜ᾳ㧉㒔☐䉨ン⃚⬀军㨼㟰ᷕ
° loadvm filename: 䓙㨼㟰ᷕ庱ℍ㧉㒔☐䉨ン
° Stop: 㬊㧉㒔
° c ㆾġcont: 两临㧉㒔
° sendkey keys: ⁛復㝸ᾳkey䴎㧉㒔☐ˤἧ䓐ġ- Ἦ忋䳸墯⎰挝ˤ
• ἳ烉``sendkey ctrl-alt-f1”ġ堐䣢⁛復ġ<Ctrl><Alt><F1> 䴎㧉㒔☐ˤ
° system_reset:ġ慵㕘┇≽䲣䴙ˤĎ
UEE 3303 <40> YL Huang Spring ‘14 © NCTU](https://image.slidesharecdn.com/random-140905124409-phpapp02/75/slide-17-2048.jpg)
![12
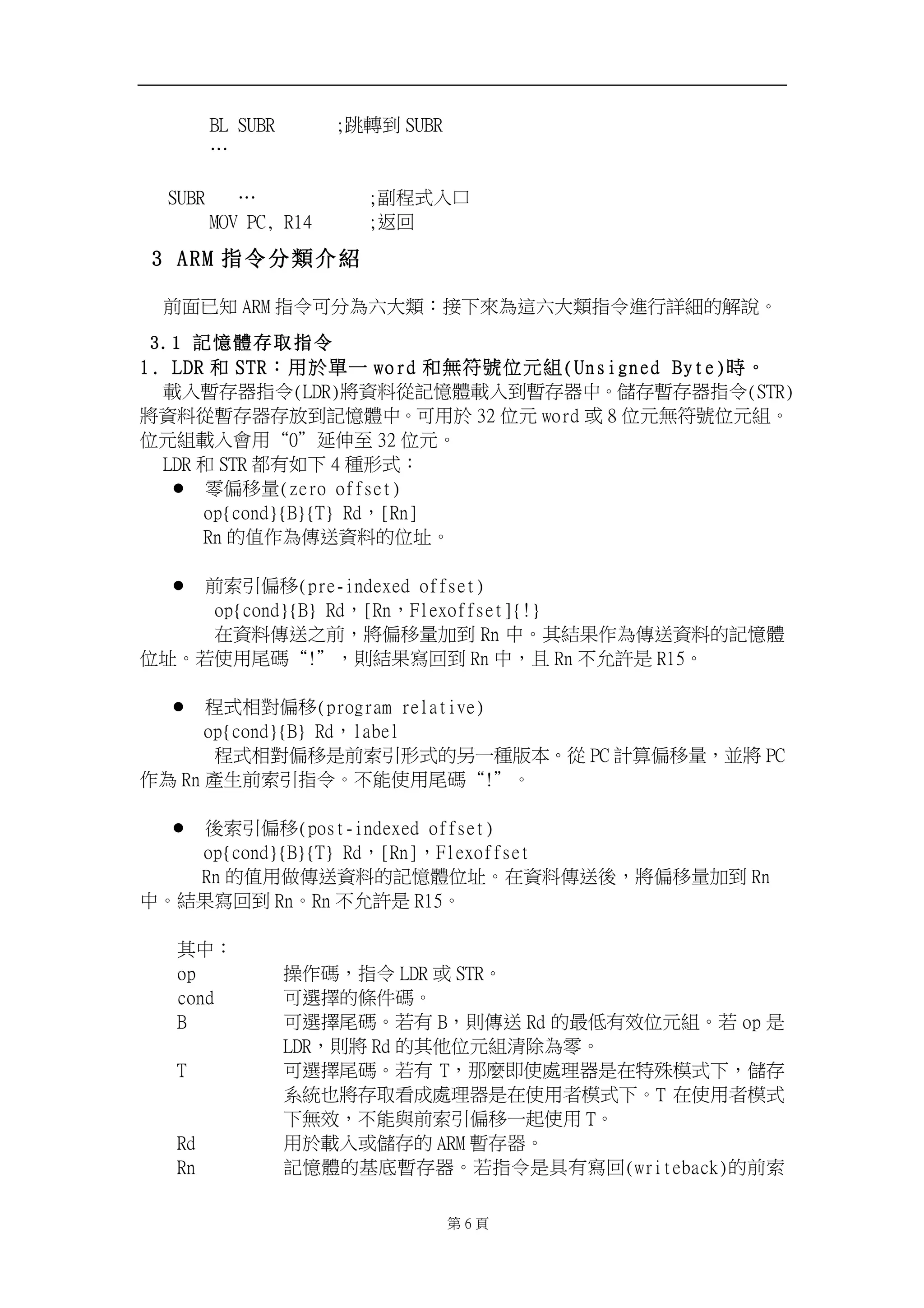
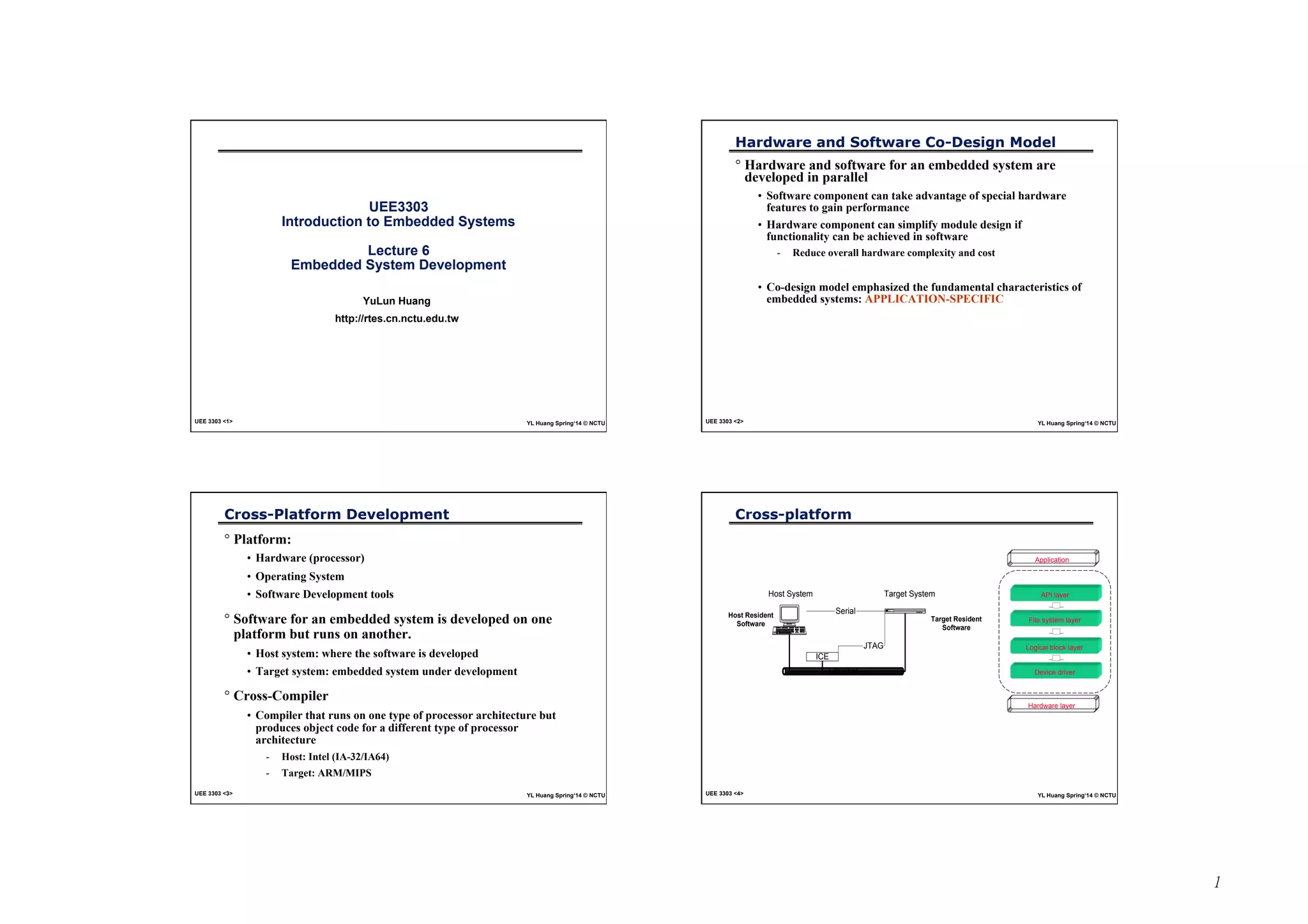
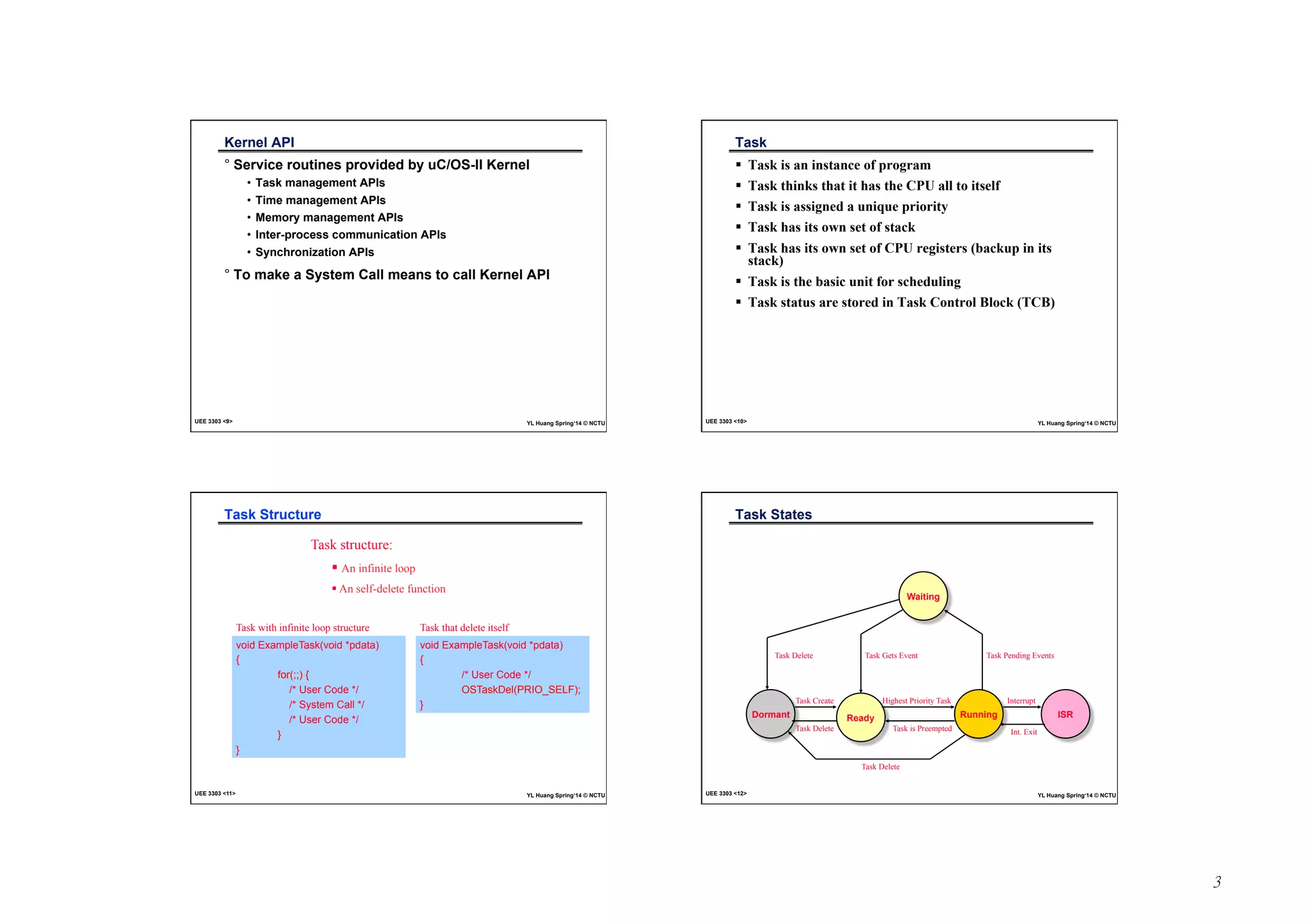
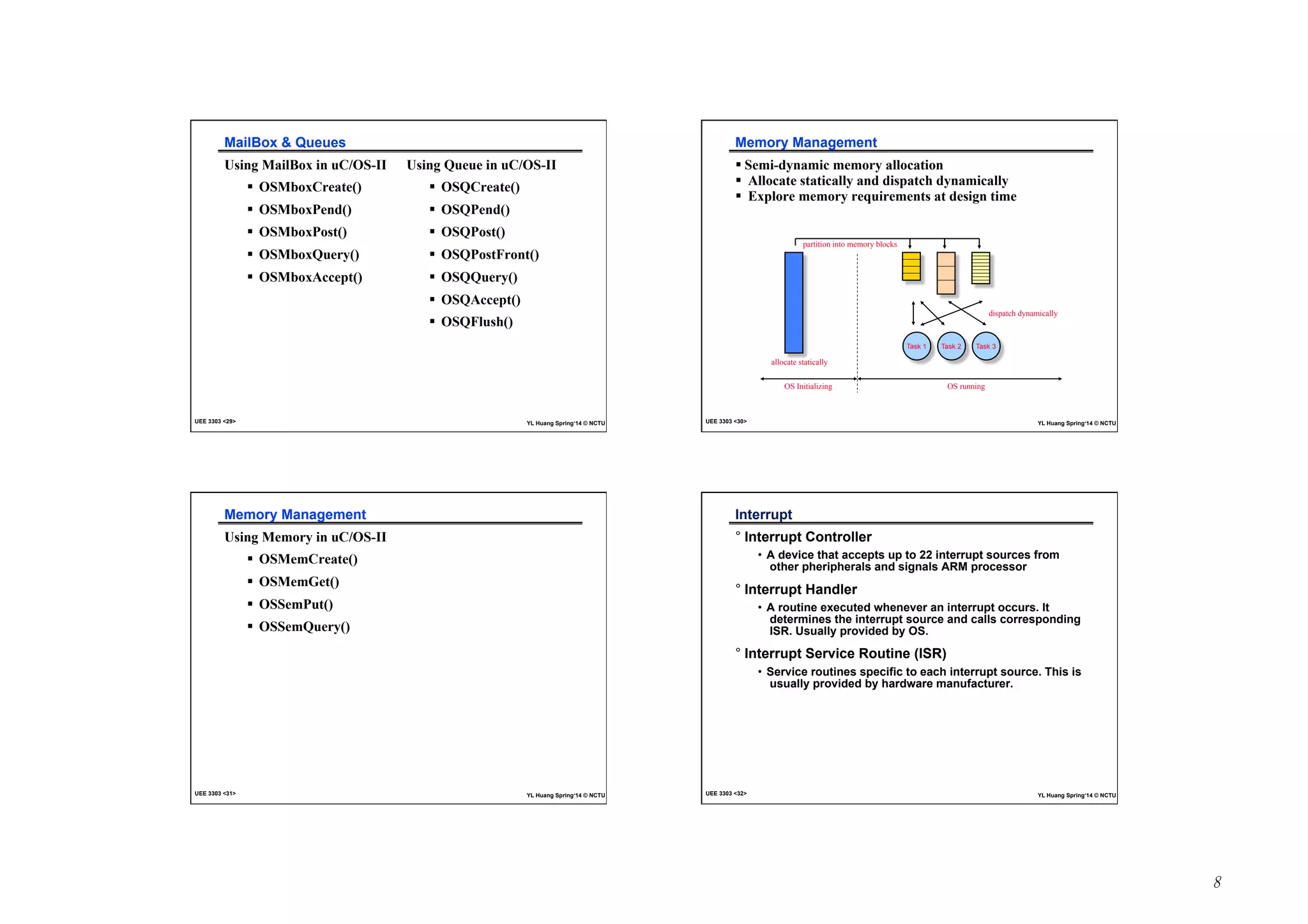
Driver
° Why divide driver into two parts
• Easy to replace underlying hardware
• Unique interface to applications
• Easy to adopt pre-written assembly code
UEE 3303 45 YL Huang Spring‘14 © NCTU
Driver
° API Example
Available commands:
• Read_Byte
• Write_Byte
• Init_Device
• Enable_Device
• Disable_Device
Set_serial_baudrate(int baud)
{
OS_Request_Device();
Disable_Device();
Write_Byte(CONF_BASE, baud);
Enable_Device();
OS_Release_Device();
}
UEE 3303 46 YL Huang Spring‘14 © NCTU
Driver
° API Example
Send_serial(char data[], int len)
{
OS_Request_Device();
for(I=0;Ilen;I++)
Write_Byte(IO_BASE, data[I]);
OS_Release_Device();
}
Available commands:
• Read_Byte
• Write_Byte
• Init_Device
• Enable_Device
• Disable_Device
UEE 3303 47 YL Huang Spring‘14 © NCTU
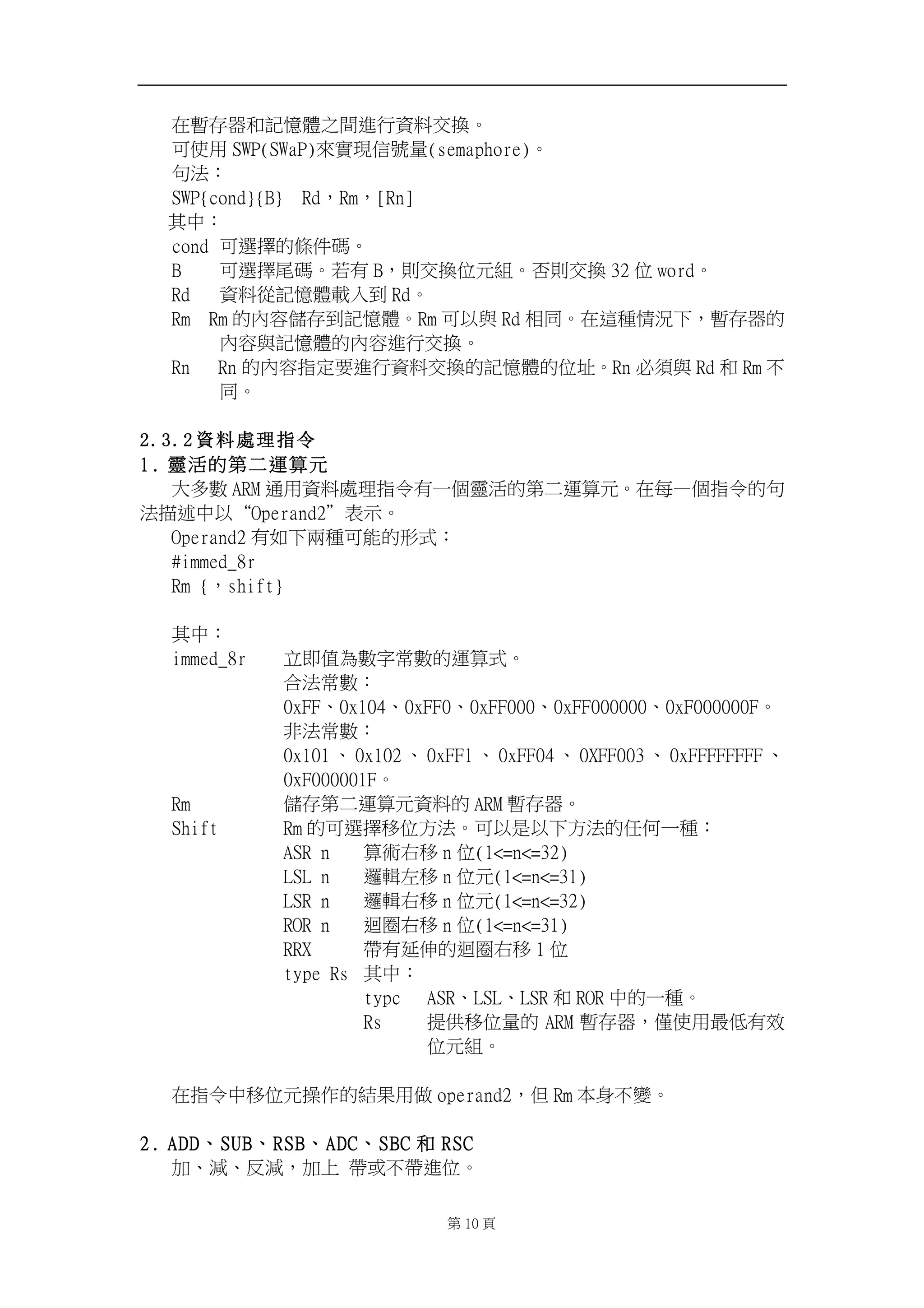
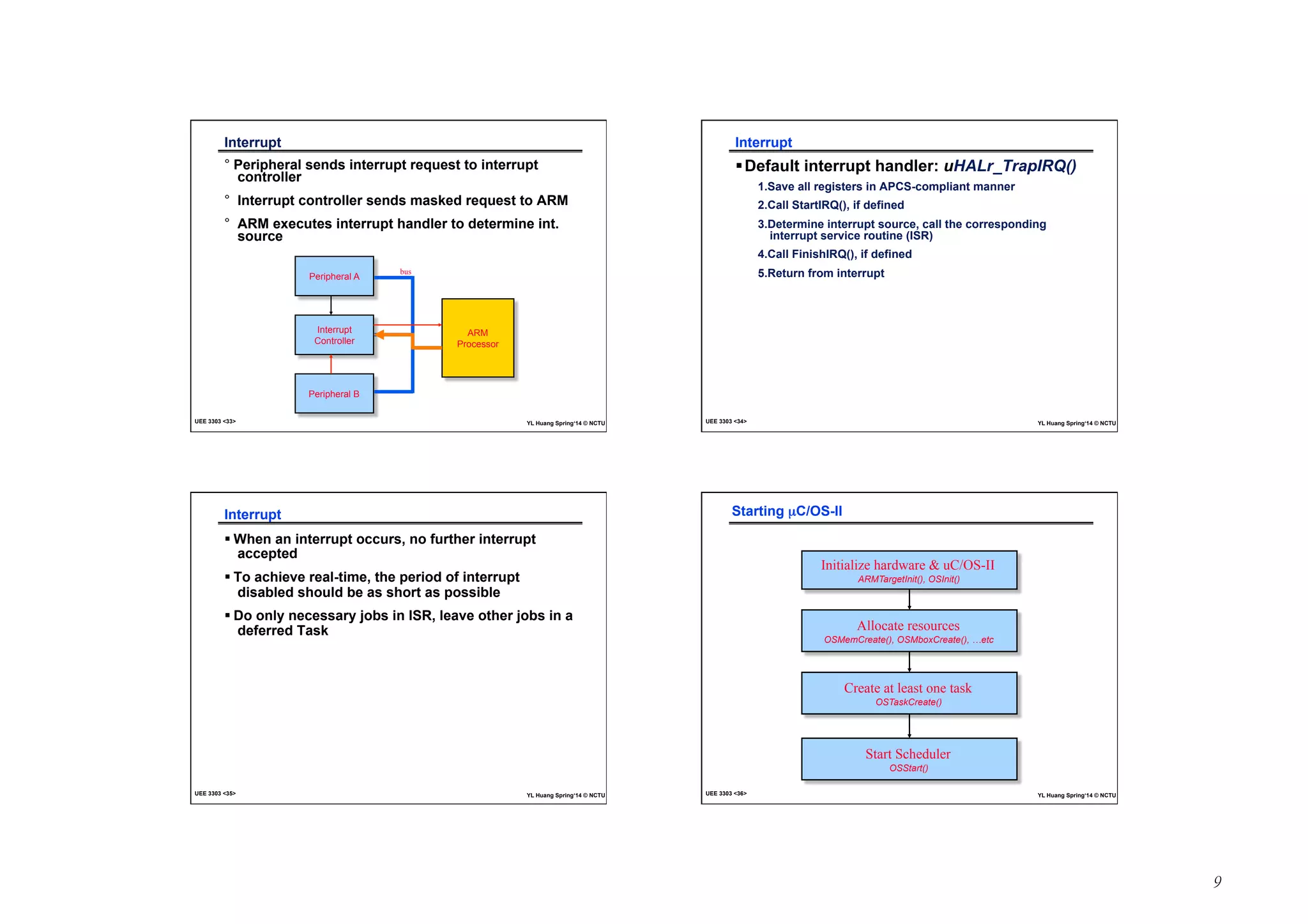
Driver Design Flow
start
Decide I/O interface
(I/O address, I/O method)
Write Assembly code
to control hardware
Pack assembly code
into commands
Write interrupt handler
Write API base on previously
Developed commands
Test Driver
end
Test assembly code
UEE 3303 48 YL Huang Spring‘14 © NCTU](https://image.slidesharecdn.com/random-140905124409-phpapp02/75/slide-76-2048.jpg)
![3
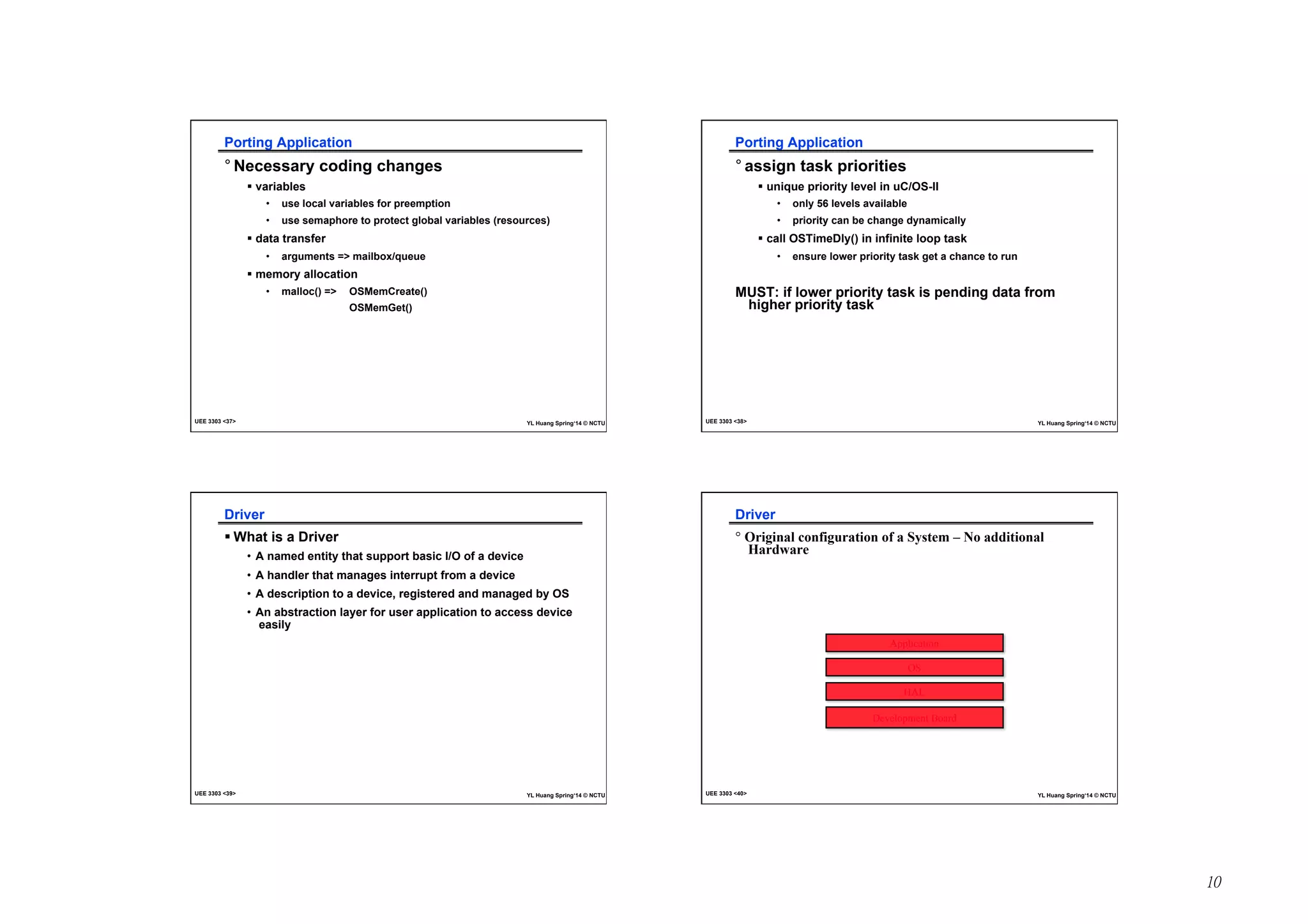
Kinetis K/L Series: Packaging
32QFN
5 x 5 mm
0.5mm pitch
(K10/20)
(KL0/1/2)
Common Packages
Kinetis K Series Package
Kinetis L Series Package
64MAPBGA
5 x 5 mm
0.5mm pitch
(K10/20)
(KL1*/2*/3*/4*)
48LQFP
7 x 7 mm
0.55mm pitch
(K10/20)
(KL0/1*/2*)
64LQFP
10 x 10 mm
0.5mm pitch
(K10/20/30/40/50)
(KL1/2/3/4)
80LQFP
12 x 12 mm
0.5mm pitch
(K10/20/30/40/50)
(KL1/2/3*/4*)
100LQFP
14 x 14 mm
0.5mm pitch
(K10/20/30/40/50/60)
(KL3/4)
Kinetis L Series Only Kinetis K Series Only
90WLCSP
3.9x4.4x0.56 mm
0.4mm pitch
(K10/20*)
144LQFP
20 x 20 mm
0.5mm pitch
(K10/20/30/40/50/60)
48QFN
7 x 7 mm
0.5mm pitch
(K10/20)
(KL0/1*/2*)
110WLCSP
3.9x4.4x0.56 mm
0.4mm pitch
(K10/20*)
144MAPBGA
13 x 13 mm
1.0mm pitch
120WLCSP
5.3x5.3x0.56 mm
0.4mm pitch
(K10/20/60)
(K10/20/30/40/50/60)
121MAPBGA
8 x 8 mm
0.65mm pitch
(K10/20/30/40/50/60)
(KL2/3/4)
143WLCSP
6.5x5.6x0.56 mm
0.4mm pitch
(K61)
256MAPBGA
17 x 17 mm
1.0mm pitch
(K60/70)
35WLCSP
2.55x3x0.56 mm
0.4mm pitch
(KL1*/2*)
32LQFP
7 x 7 mm
0.8mm pitch
(KL0)
25WLCSP
2.3x2.3x0.56 mm
0.4mm pitch
(KL0*)
20WLCSP
2x2x0.56 mm
0.4mm pitch
(KL0)
24QFN
4 x4x1 mm
0.5mm pitch
(KL0x)
16QFN
3x3x1 mm
0.5mm pitch
(KL02)
UEE 3303 9 YL Huang Spring‘14 © NCTU
*proposed
(Development Tools)
ENABLEMENT OVERVIEW
UEE 3303 10 YL Huang Spring‘14 © NCTU
Kinetis Tower System: Reusable, modular development platform
www.freescale.com/tower www.towergeeks/org
MCU Families
Supported
TWR Part
Number Contents Price
(SRP)
K20
TWR-K20D50M 64 LQFP MCU module. USB communication supported
without TWR-SER (recommended for UART) $99
TWR-K20D72M 100 LQFP MCU module. USB communication
supported without TWR-SER $119
TWR-K21D50M 81 MAPBGA MCU module. Hardware security features
supported. $119
K30/40
TWR-K40X256
TWR-K40D100M
TWR-K40X256 Rev 1.0 (144MBGA), TWRPI-SLCD
TWR-K40D100M Rev 2.0 Silicon (144MBGA) $69
TWR-K40X256-KIT TWR-K40X256 (144MBGA), TWRPI-SLCD
TWR-SER, TWR-ELEV $139
K50
TWR-K53N512 TWR-K53N512 (144MBGA), TWRPI-SLCD $109
TWR-K53N512-KIT TWR-K53N512 (144MBGA), TWRPI-SLCD,
TWR-SER, TWR-ELEV $179
K10/20/60
TWR-K60N512
TWR-K60D100M
TWR-K60N512 Rev 1.0 Silicon (144MBGA)
TWR-K60D100M Rev 2.0 Silicon (144MBGA)
TWR-K60N512-KIT TWR-K60N512 (144MBGA), TWR-SER, TWR-ELEV $139
TWR-K60N512-IAR TWR-K60N512-KIT (144MBGA),
TWR-PROTO, Segger J-Link Lite Debug Probe, IAR
EWARM IDE (eval. version)
NEW
TWR-K60N512-KEIL TWR-K60N512-KIT (144MBGA),
UNLINK-ME Debug Probe,
KEIL MDK IDE (eval. version)
• IDEs: FSL CodeWarrior, IAR Embedded Workbench, Keil MDK,
• Freescale MQX RTOS
• OSJTAG Debug circuitry – program debug with USB cable
$69
$99
$239
$199
TWR-SENSOR
-PAK
TWR-LCD
TWR-WIFI-RS2101
• Low power touch sensing plug-in socket for expansion:
Sensors, Radio, etc…
• Fully compatible with all Tower peripheral modules UEE 3303 12 YL Huang Spring‘14 © NCTU
UEE 3303 11 YL Huang Spring‘14 © NCTU
Kinetis IDE Support
Availability
1. Freescale (CodeWarrior 10.1) [available now]
- Includes MQX Task Aware Debug plug-in option
- MCU v10.4 [available now]
2. IAR (Embedded Workbench) [available now]
- EWARM: Supports all ARM7/9 and all Cortex Devices
- EWARM-BaseLine (BL): All the features of EWARM but is limited in code space up to 256KB
- EWARM-CM: Supports any Cortex-M series devices including (M4)
- EWARM-CM-FSL: Supports any Kinetis Cortex-M4 series device
– Will be re-sold via FSL Buy Direct program only. $2500 for 1 year license
– Includes MQX Task Aware Debug plug-in option
– http://www.freescale.com/webapp/sps/site/prod_summary.jsp?code=EWARM-CM-FSLfsrch=1sr=2
3. Keil (MDK) [available now]
- MQX Task Aware Debug plug-in planned .
4. Greenhills (MULTI) [available now]
5. CodeSourcery (Sourcery G++) [available now]
- MQX Task Aware Debug plug-in planned.](https://image.slidesharecdn.com/random-140905124409-phpapp02/75/slide-79-2048.jpg)
![6
Moving from 8/16-bit to 32-bit ARM Cortex-M0+
Benefits
• Linear 4GB address space
• Full-featured interrupt
controller
• Huge scalability
• Huge ARM ecosystem
• Micro Trace Buffer
• 12-35kgates (similar to
8/16bit)
• Excellent code density
• 2x to 40x more than 8/16-
bit, 9% more than Cortex-
M0
• Fast 32-bit math
processing
• Fast single-cycle access
to I/O
• 2x CoreMark/mA than
closest 8/16-bit MCU,
+30% / CM0
Performance Ease-of-
Development
Energy- Low Cost
Efficiency
UEE 3303 21 YL Huang Spring‘14 © NCTU
K
L
M
W
E
X
Kinetis L Series:
Reduce cycles for optimized power efficiency
! Supported operations
• Decorated Stores
• Logical AND, OR, XOR
• Bit field insert (BFI)
! Supported operations
• Load-and-Clear 1 bit (LAC1)
• Load-and-Set 1 bit (LAS1)
• Unsigned Bit Field Extract (UBFX)
Task Normal C Code Size BME Code Size Improvement
Logical XOR operation 12Bytes 6Bytes 50%
Bit Field Insert 24Bytes 6Bytes 75%
GPIOA_PDOR ^= 0x02; // Logical XOR
0000005E 0x.... LDR R0,?
?DataTable6_5 ;; 0x400ff000
00000060 0x6800 LDR R0,[R0, #+0]
00000062 0x2102 MOVS R1,#+2
00000064 0x4041 EORS R1,R1,R0
00000066 0x.... LDR R0,?
?DataTable6_5 ;; 0x400ff000
00000068 0x6001 STR R1,[R0, #+0]
Uses 12 Bytes
// Macro used to generate hardcoded XOR address
#define BME_XOR_ADDR(ADDR) (*(volatile uint32_t *
)(((uint32_t)ADDR) | (326)))
BME_XOR_ADDR(GPIOA_PDOR) = 0x02;
00000014 0x.... LDR R0,??DataTable6_6 ;;
0x4c0ff000
00000016 0x2102 MOVS R1,#+2
00000018 0x6001 STR R1,[R0, #+0]
Uses 6 Bytes
UEE 3303 22 YL Huang Spring‘14 © NCTU
ARM Cortex-M0+ Processor:
Fast I/O Port
ARM Cortex-M0+ Fast IO Port
! Single access Processor
! Most suited to critical GPIO
and Peripherals
Advantages for the application
! Higher GPIO toggling frequency
! Bit-bang the I/O as on a 8-bit
! Save precious cycles, e.g. set
faster peripherals for low
-power
! “Harvard-like”: access GPIO
/Peripheral while processor
fetch the next instruction
UEE 3303 23 YL Huang Spring‘14 © NCTU
ARM Cortex-M0+ Processor:
A faster route to a bug free application
ARM Micro Trace Buffer (MTB)
! Lightweight Trace
! Trace stored in RAM
! Non intrusive
! Read over Serial Wire /JTAG
Freescale extensions:
! Additional address (and optionally
data) watch points
! Define specific memory references
were the trace start and stop
AHB
MTB Controller
RAM
I/F
store trace
information
SRAM
Appl.Data
+
Trace Data
read trace
information
UEE 3303 24 YL Huang Spring‘14 © NCTU](https://image.slidesharecdn.com/random-140905124409-phpapp02/75/slide-82-2048.jpg)
![6
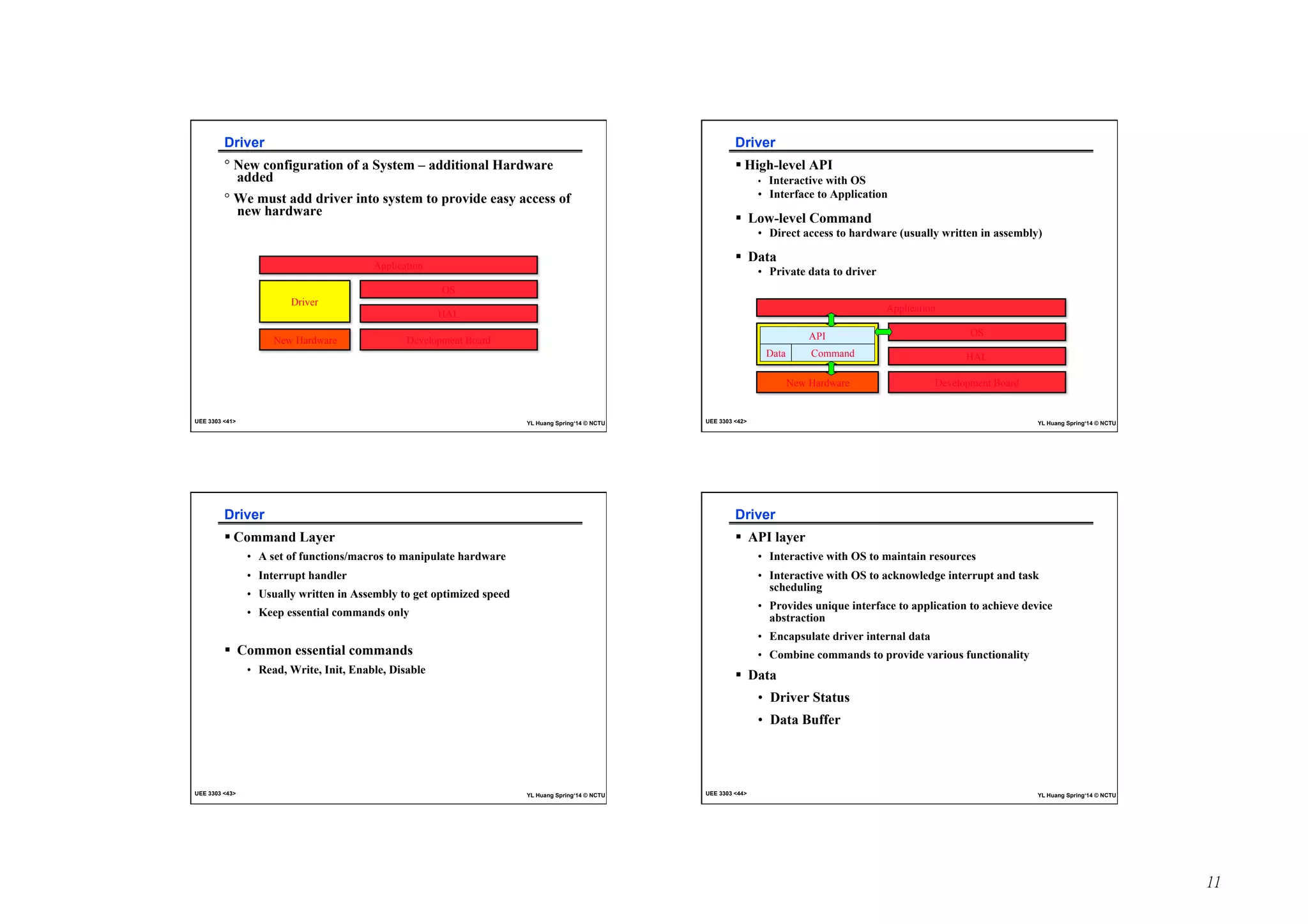
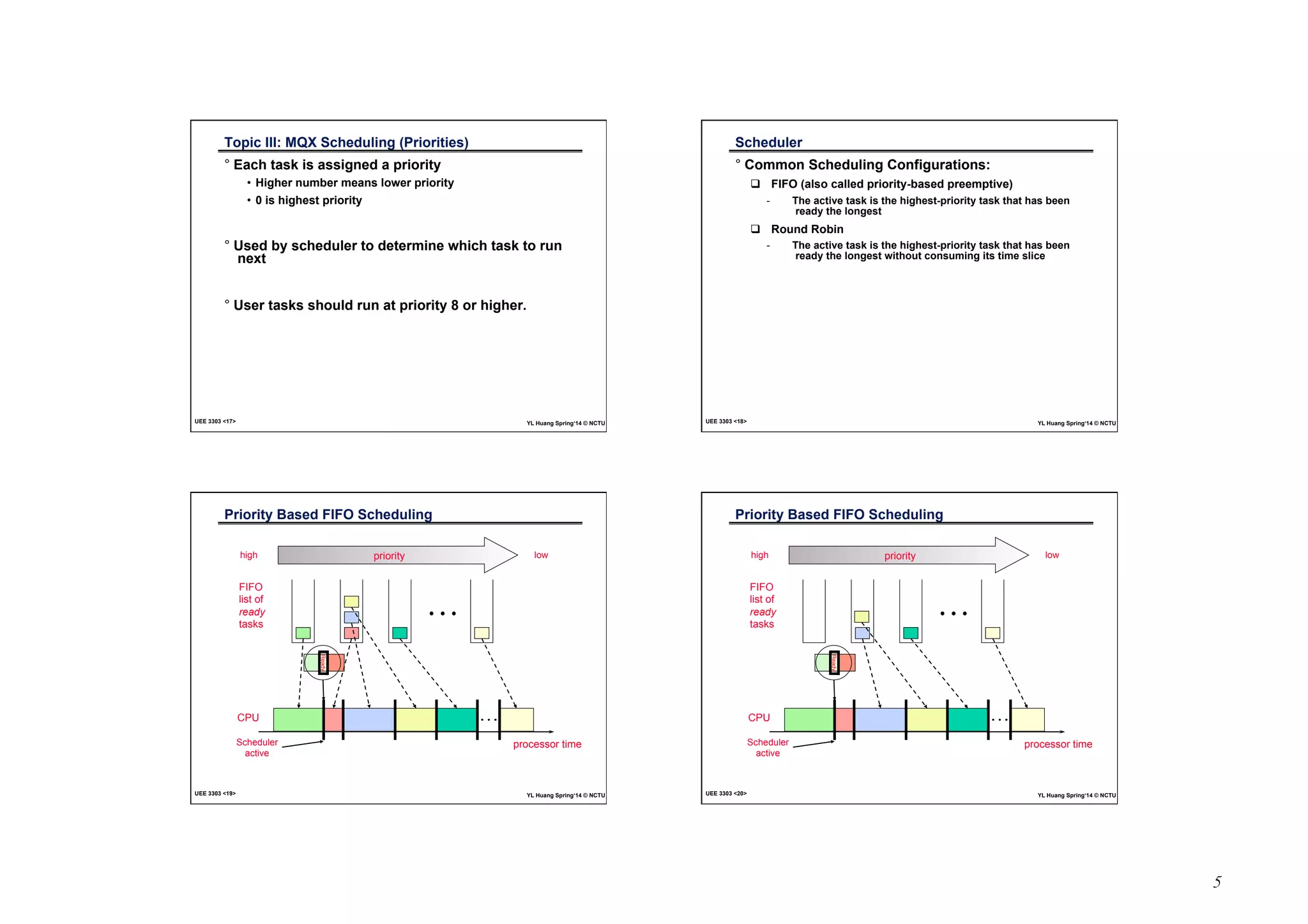
Priority Based FIFO Scheduling
high priority low
FIFO
list of
ready
tasks
Ready
CPU
Scheduler processor time
active
UEE 3303 21 YL Huang Spring‘14 © NCTU
Round-Robin Scheduling
75ms
Task 1
Task 2
50ms
Same
Priority
Time Slice = 50ms Task 3
60ms
Ready
time
Task1 Task2 Task3 Task1 Task3
T0 50ms 100ms 150ms 200ms time
UEE 3303 22 YL Huang Spring‘14 © NCTU
MQX Tasks
° Tasks can be automatically
created when MQX Starts;
also, any task can create
another task by calling
_task_create() or
_task_create_blocked()
° The function
_task_create() puts the
child task in the ready state
and the scheduler puts the
higher priority task to run
° If _task_create_blocked
is used the task is not ready
until _task_ready() is
called
_task_abort
_task_destroy
Terminated
_task_create
Active
Ready
_task_block
Blocked
_task_ready
UEE 3303 23 YL Huang Spring‘14 © NCTU
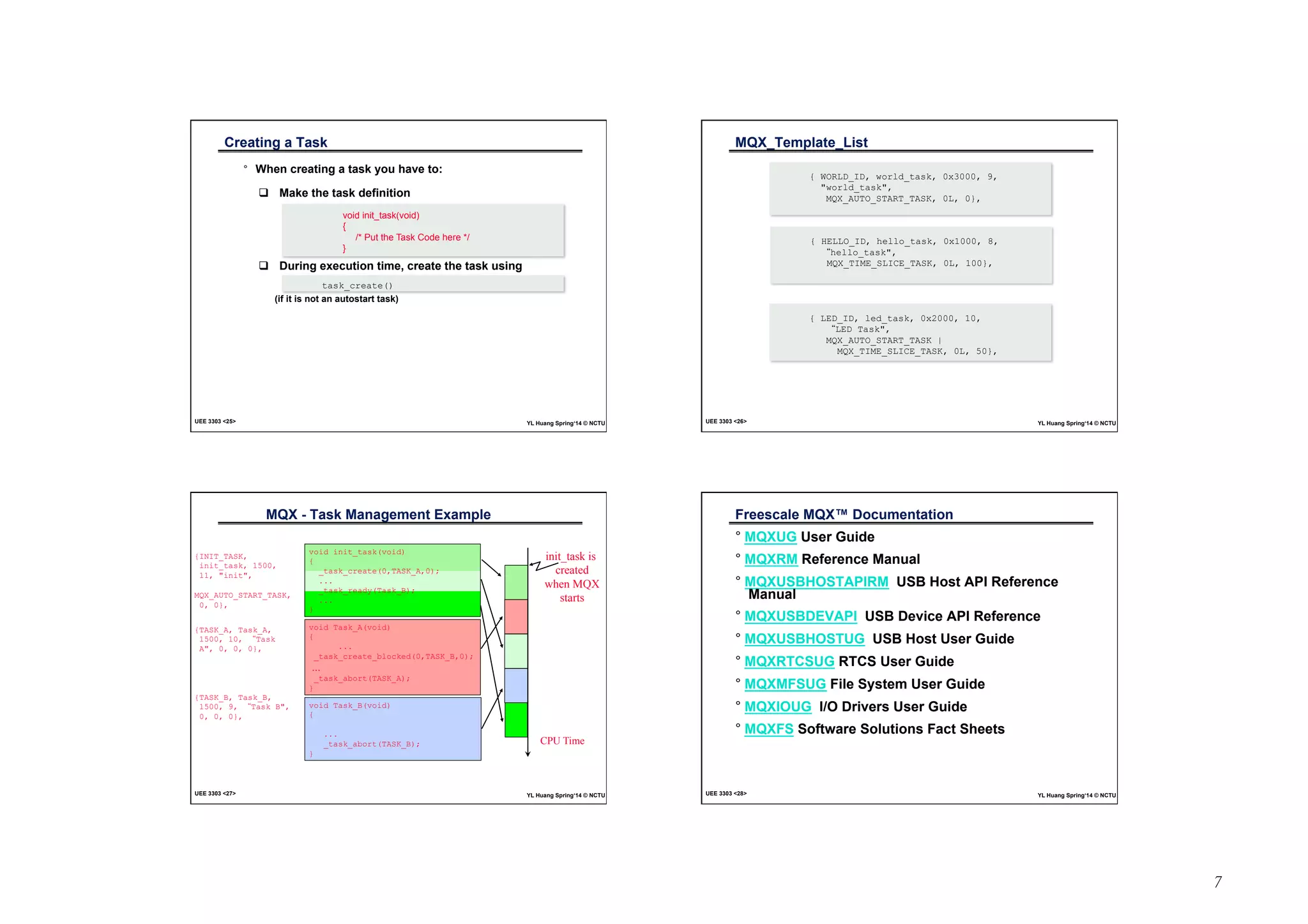
Creating a Task
° When creating a task you have to:
! Make the task prototype and index definition
#define INIT_TASK 5
extern void init_task(uint_32);
! Add the task in the Task Template List
TASK_TEMPLATE_STRUCT MQX_template_list[] =
{
{ TASK_INDEX, TASK, STACK, TASK_PRIORITY,
TASK_NAME, TASK_ATTRIBUTES, CREATION_PARAMETER,
TIME_SLICE}
}
Using the init_task example:
TASK_TEMPLATE_STRUCT MQX_template_list[] =
{
{INIT_TASK, init_task, 1500, 9, init,
MQX_AUTO_START_TASK, 0, 0},
}
UEE 3303 24 YL Huang Spring‘14 © NCTU](https://image.slidesharecdn.com/random-140905124409-phpapp02/75/slide-92-2048.jpg)

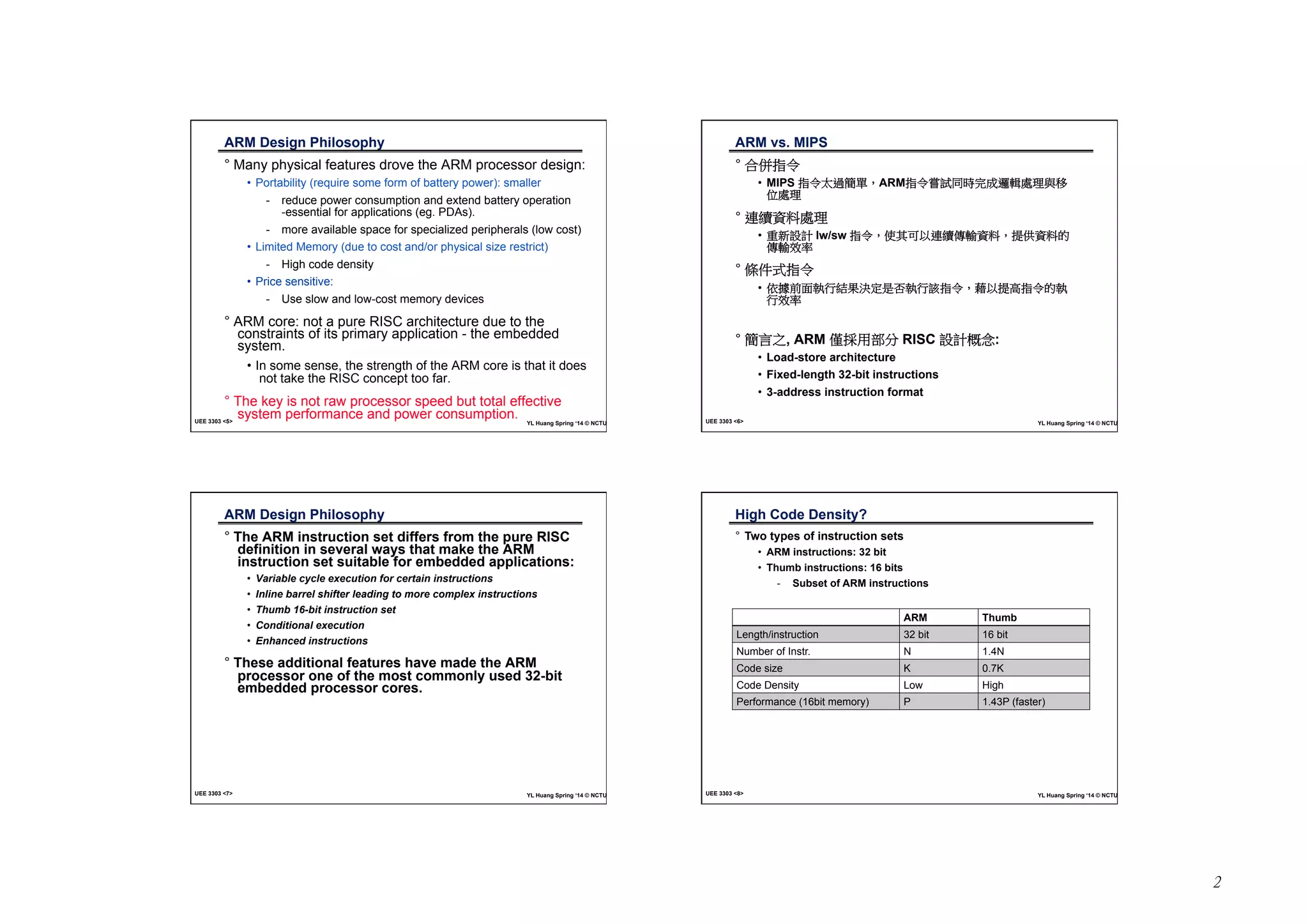
This document provides an overview of an introductory lecture on embedded systems and ARM processors. It discusses the ARM instruction set, versions of ARM including ARM7, and ARM's design philosophy which emphasizes portability, limited memory, and price sensitivity for embedded applications. The goal is high code density and total effective system performance while minimizing power consumption.