More Related Content

PDF
โลก ดาราศาสตร์ อวกาศ ม.4 เล่ม 2_บทที่ 6 แผนที่ภูมิประเทศและแผนที่ธรณีวิทยา 
PDF

PDF
การเทียบเสียงตัวอักษรภาษาอังกฤษกับไทย 
PDF
อนุกรมวิธาน+อาณาจักรสัตว์ 
PDF

PDF

PDF

PDF
What's hot

PDF
ปัจจัยที่ทำให้เกิดการเปลี่ยนแปลงแอลลีล 
PPTX

PDF
ชุดกิจกรรมการเรียนรู้ ทฤษฎีของแสงและอัตราเร็วแสง 
PDF

PDF

PPTX

PDF

PDF
Microsoft word ใบงาน การลำเลียงสารในร่างกายของสัตว์ 
PDF

PDF
วิทยาศาสตร์ ป.5 หน่วย2_สิ่งมีชีวิตกับสิ่งแวดล้อม.pdf 
PDF

PDF

PDF
การหางานจากพื้นที่ใต้กราฟ 
PPT

PPT

PPTX
สื่อการสอน เรื่อง งานประดิษฐ์ 
PDF
แบบฝึกทักษะวิชาฟิสิกส์ สำหรับนักเรียนชั้นมัธยมศึกษาปีที่ 4 เรื่องโมเมนตัมและก... 
PPTX
การตั้งสมมติฐานและการกำหนดตัวแปร 
PPTX

PDF
Similar to หุ่นยนต์ควบคุมด้วยมือ

PPT
บทที่ 9 หุ่นยนต์ขนาดเล็กควบคุมด้วยไมโครคอนดทรเลอร์ 
PPTX

PPT

PPTX

PDF

PPTX
การใช้งานหุ่นยนต์ IPST-MicroBOX SE (i-BOT) 
PPTX
การสร้าง optokinetic drum ด้วย Arduino 
PDF
Withiikaaraichngaanaelahlakkaarchudhunynt sphth radabklaang_suung 
PPTX
การใช้งานหุ่นยนต์รุ่น Robo-Circle 
PPTX

PPTX

PPTX

PPTX
I-Beam Robot From inex.co.th 
PPTX
Interactive C Robot with AX-11 Board 
PPTX
การใช้งานหุ่นยนต์ RQ-BOT จากชุด Robo-Creator XT 
PPS

PDF

PDF

PPT

PPT
More from ssuser5adb53

PPTX

PPTX

PPTX
ชนิดของการเคลื่อนไหวในโปรแกรมFlash 
PPTX
การสร้างงานแอนนิเมชั่น Ep.1 
PPTX
แนวการสร้างภาพแอนนิเมชั่น+การใช้โปรแกรมFlash 
PPTX
ประเภทของภาพกราฟิก และไฟล์ภาพ 
PPTX
หุ่นยนต์ควบคุมด้วยมือ
- 1.
- 2.
ส่วนประกอบของรถบังคับแบบใช้
สายก็ไม่มีอะไรมาก มีแค่ มอเตอร์
ฟันเฟืองทดรอบ แบตเตอรี่ ล้อ
ปุ่มกดสาหรับบังคับ เดินหน้า ถอย
หลัง เลี้ยวซ้าย เลี้ยวขวา ทั้งหมด
ประกอบเข้าด้วยกัน โดยอาศัย
หลักการทางไฟฟ้าอย่างง่าย ไม่
ซับซ้อน
รถบังคับทำงำนอย่ำงไร
เมื่อกดสวิตช์ตัวบน มอเตอร์ตัวบนจะหมุน เมื่อกดสวิตช์ตัวล่างมอเตอร์ตัวล่างจะหมุน ถ้ากดสวิตช์สองตัวพร้อมกันมอเตอร์ก็จะหมุนพร้อมกัน แต่หมุนในทิศทางที่
ตรงข้ามกัน ด้วยหลักการดังกล่าว เราก็สามารถสร้างรถบังคับแบบใช้สายอย่างง่ายได้แล้ว
- 3.
.
เปลี่ยนรถบังคับให้เป็ น
หุ่นยนต์
หุ่นยนต์ หรือโรบอท (robot) คือเครื่องจักรกลชนิดหนึ่ง มีลักษณะโครงสร้าง
และรูปร่างแตกต่างกัน หุ่นยนต์ในแต่ละประเภทจะมีหน้าที่การทางานในด้านต่าง ๆ ตาม
การควบคุมโดยตรงของมนุษย์ การควบคุมระบบต่างๆ ในการสั่งงานระหว่างหุ่นยนต์และ
มนุษย์ สามารถทาได้โดยมนุษย์เป็นผู้ควบคุมและทางานแบบอัตโนมัติ โดยทั่วไปหุ่นยนต์
ถูกสร้างขึ้นสาหรับงานที่มีความยากลาบากแทนมนุษย์ จากคานิยามเราสามารถกดสวิตช์
ให้รถเดินหน้า เลี้ยวซ้าย ขวา เพื่อให้ทางานอย่างใดอย่างหนึ่งตามที่เราต้องการได้เช่นกัน
ดังนั้นจากความหมายข้างต้น ถ้ากาหนดงานที่ชัดเจนให้กับรถบังคับ เราก็สามารถเรียกได้
ว่ารถบังคับก็ทาหน้าที่เป็นหุ่นยนต์ ประเภทหนึ่งได้เหมือนกัน
- 4.
- 5.
.
วงจรไฟฟ
้ ำ
วงจรไฟฟ้า หมายถึงทางเดินของกระแสไฟฟ้าซึ่งไหลมาจากแหล่งกาเนิดผ่านตัวนา และเครื่องใช้ไฟฟ้าหรือ
โหลด แล้วไหลกลับไปยังแหล่งกาเนิดเดิม
จากปรากฏการณ์ทางไฟฟ้าต่างๆ ที่เกิดขึ้น จะพบว่ามีสาเหตุมาจากการไหลของไฟฟ้า สายไฟทั่วไปทาด้วยลวด
ตัวนา คือ โลหะทองแดงและอะลูมิเนียม อะตอมของโลหะมีอิเล็กตรอนอิสระ ไม่ยึดแน่นกับอะตอม จึงเคลื่อนไหว
ได้อย่างอิสระ
ถ้ามีประจุลบเพิ่มขึ้นในสายไฟ อิเล็กตรอนอิสระ 1 ตัวจะถูกดึงเข้าหาประจุไฟฟ้าบวก แล้วรวมตัวกับประจุไฟฟ้า
บวกเพื่อเป็นกลาง
ดังนั้น อิเล็กตรอนจะเคลื่อนที่ เมื่อเกิดสภาพขาดอิเล็กตรอนจึงจ่ายประจุไฟฟ้าลบออกไปแทนที่ ทาให้เกิดการไหล
ของอิเล็กตรอนในสายไฟจนกว่าประจุไฟฟ้าบวกจะถูกทาให้เป็นกลางหมด การเคลื่อนที่ของอิเล็กตรอนหรือการ
ไหลของอิเล็กตรอนในสายไฟนี้เรียกว่า กระแสไฟฟ
้ ำ (Electric Current)
- 6.
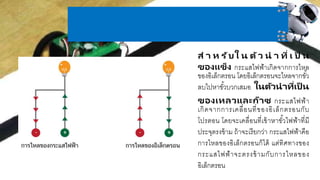
. ส ำห รับใ น ตัว น ำ ที่ เ ป็ น
ของแข็ง กระแสไฟฟ้าเกิดจากการไหล
ของอิเล็กตรอน โดยอิเล็กตรอนจะไหลจากขั้ว
ลบไปหาขั้วบวกเสมอ ในตัวนำที่เป็ น
ของเหลวและก๊ำซ กระแสไฟฟ้า
เกิดจากการเคลื่อนที่ของอิเล็กตรอนกับ
โปรตอน โดยจะเคลื่อนที่เข้าหาขั้วไฟฟ้าที่มี
ประจุตรงข้าม ถ้าจะเรียกว่า กระแสไฟฟ้าคือ
การไหลของอิเล็กตรอนก็ได้ แต่ทิศทางของ
กระแสไฟฟ้าจะตรงข้ามกับการไหลของ
อิเล็กตรอน
- 7.
- 8.
.
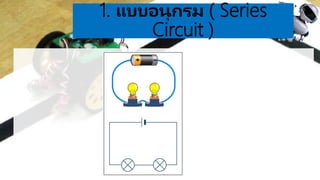
1. แบบอนุกรม (Series
Circuit )
เป็นการนาเอาเครื่องใช้ไฟฟ้าหรือโหลดหลายๆ อันมาต่อเรียงกันไปเหมือนลูกโซ่ กล่าวคือ ปลายของ
เครื่องใช้ไฟฟ้าตัวที่ 1 นาไปต่อกับต้นของเครื่องใช้ไฟฟ้าตัวที่ 2 และต่อเรียงกันไปเรื่อยๆ จนหมด แล้วนาไปต่อ
เข้ากับแหล่งกาเนิด
การต่อวงจรแบบอนุกรมจะมีทางเดินของกระแสไฟฟ้าได้ทางเดียวเท่านั้น ถ้าเกิดเครื่องใช้ไฟฟ้าตัวใดตัวหนึ่งเปิด
วงจรหรือขาด จะทาให้วงจรทั้งหมดไม่ทางาน
คุณสมบัติที่สำคัญของวงจรอนุกรม
1.1 กระแสไฟฟ้าจะไหลผ่านเท่ากันและมีทิศทางเดียวกันตลอดทั้งวงจร
1.2 ความต้านทานรวมของวงจรจะมีค่าเท่ากับผลรวมของความต้านทานแต่ละตัวในวงจรรวมกัน
1.3 แรงดันไฟฟ้าตกคร่อมส่วนต่างๆ ของวงจร เมื่อนามารวมกันแล้วจะเท่ากับแรงดันไฟฟ้าที่แหล่งกาเนิด
- 9.
- 10.
.
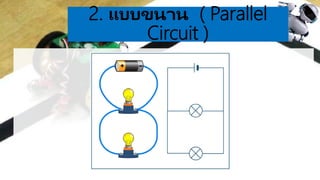
2. แบบขนำน (Parallel
Circuit )
เป็นการนาเอาต้นของเครื่องใช้ไฟฟ้าทุกๆ ตัวมาต่อรวมกัน และต่อเข้ากับแหล่งกาเนิดที่จุดหนึ่ง นาปลายสายของ
ทุกๆ ตัวมาต่อรวมกันและนาไปต่อกับแหล่งกาเนิดอีกจุดหนึ่งที่เหลือ
ซึ่งเมื่อเครื่องใช้ไฟฟ้าแต่ละอันต่อเรียบร้อยแล้วจะกลายเป็นวงจรย่อย กระแสไฟฟ้าที่ไหลจะสามารถไหลได้หลาย
ทางขึ้นอยู่กับตัวของเครื่องใช้ไฟฟ้าที่นามาต่อขนานกัน ถ้าเกิดในวงจรมีเครื่องใช้ไฟฟ้าตัวหนึ่งขาดหรือเปิดวงจร
เครื่องใช้ไฟฟ้าที่เหลือก็ยังสามารถทางานได้ ในบ้านเรือนที่อยู่อาศัยปัจจุบันจะเป็นการต่อวงจรแบบนี้ทั้งสิ้น
คุณสมบัติที่สำคัญของวงจรขนำน
2.1 กระแสไฟฟ้ารวมของวงจรขนาน จะมีค่าเท่ากับกระแสไฟฟ้าย่อยที่ไหลในแต่ละสาขาของวงจรรวมกัน
2.2 แรงดันไฟฟ้าตกคร่อมส่วนต่างๆ ของวงจร จะเท่ากับแรงดันไฟฟ้าที่แหล่งกาเนิด
2.3 ความต้านทานรวมของวงจร จะมีค่าน้อยกว่าความต้านทานตัวที่น้อยที่สุดที่ต่ออยู่ในวงจร
- 11.
- 12.
.
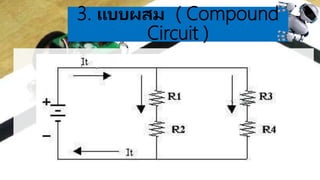
3. แบบผสม (Compound
Circuit )
การต่อวงจรทั้งแบบอนกรมและแบบขนานเข้าไปในวงจรเดียว การต่อแบบนี้โดยทั่วไปไม่นิยมใช้กัน
เพราะเกิดความยุ่งยาก จะใช้กันแต่ในทางด้านอิเล็กทรอนิกส์เป็นส่วนใหญ่ เช่น ตัวต้านทานตัวหนึ่งต่อ
อนุกรมกับตัวต้านทานอีกตัวหนึ่ง แล้วนาตัวต้านทานทั้งสองไปต่อตัวต้านทานอีกชุดหนึ่ง
จะสังเกตเห็นได้ว่าการต่อวงจรแบบผสมนี้เป็นการนาเอาวงจรอนุกรมกับขนานมารวมกัน และสามารถ
ประยุกต์เป็นรูปแบบอื่นๆได้ ข้นอยู่กับการนาไปใช้ให้เหมาะสม เพราะการต่อแบบผสมนี้ไม่ม่ กฏเกณฑ์
ตายตัว เป็นการต่อเพื่อนาค่าที่ได้ไปใช้กับงานอย่างใดอย่างหนึ่ง เช่น ในวงจรอิเล็กทรอิกส์ เป็นต้น
- 13.
- 14.
.
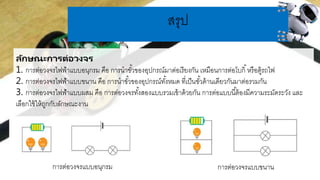
สรุป
ลักษณะกำรต่อวงจร
1. การต่อวงจรไฟฟ้าแบบอนุกรม คือการนาขั้วของอุปกรณ์มาต่อเรียงกัน เหมือนการต่อโบกิ้หรือตู้รถไฟ
2. การต่อวงจรไฟฟ้าแบบขนาน คือ การนาขั้วของอุปกรณ์ทั้งหมด ที่เป็นขั้วด้านเดียวกันมาต่อรวมกัน
3. การต่อวงจรไฟฟ้าแบบผสม คือ การต่อวงจรทั้งสองแบบรวมเข้าด้วยกัน การต่อแบบนี้ต้องมีความระมัดระวัง และ
เลือกใช้ให้ถูกกับลักษณะงาน
การต่อวงจรแบบอนุกรม การต่อวงจรแบบขนาน
- 15.