This document provides an overview of Queensgate, a company that develops nanopositioning systems. Some key points:
- Queensgate was spun off from Imperial College London in 1978 and manufactures precision positioning systems.
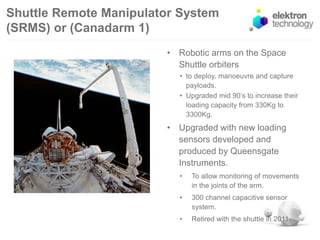
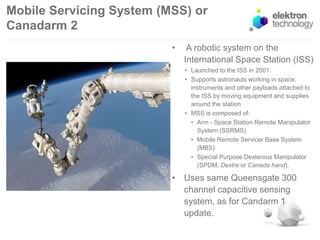
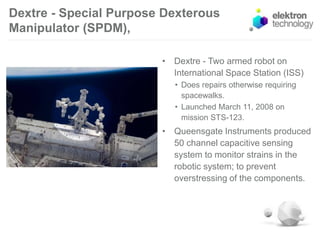
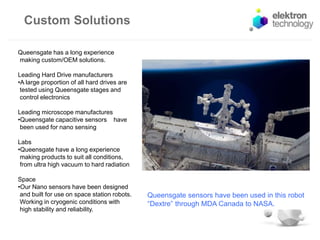
- They have worked on numerous space projects including providing sensors for the Canadarm robotic arms on the Space Shuttle and International Space Station.
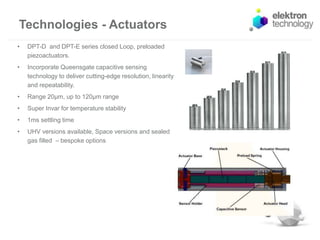
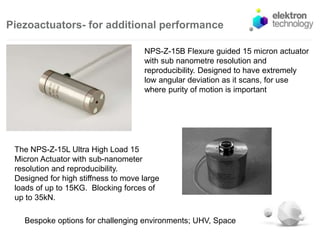
- Their technologies include high-precision tip/tilt mirrors, piezo actuators, and capacitive sensors designed for applications in space, vacuum environments, and cryogenic conditions.
- Queensgate offers customized solutions and has experience designing products that meet the stringent requirements of applications in labs, manufacturing, and space exploration.