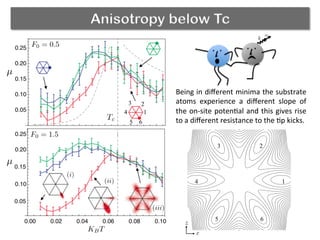
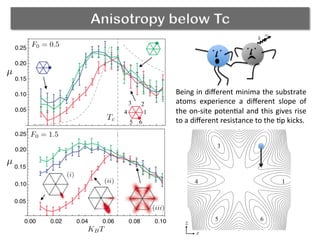
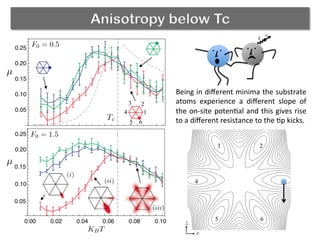
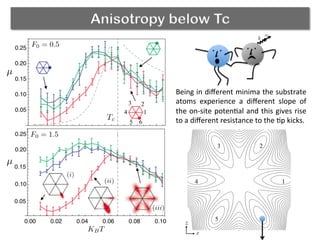
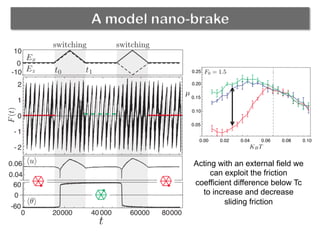
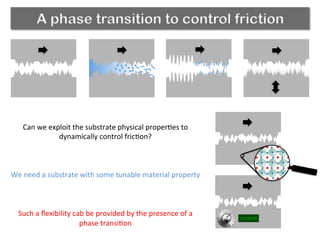
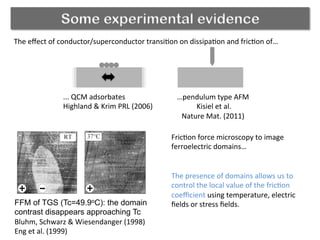
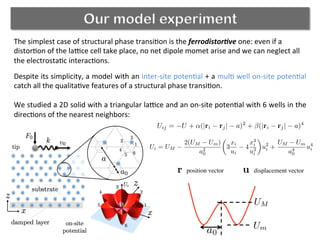
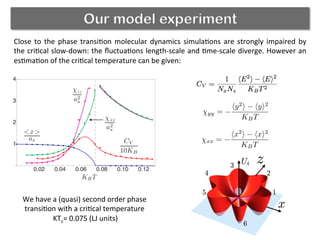
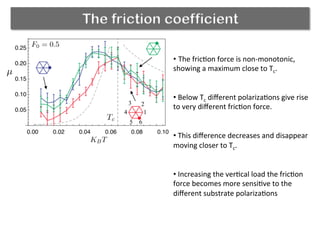
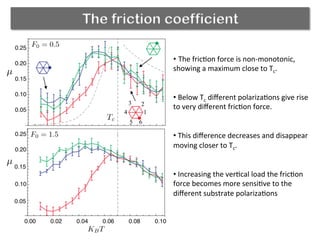
The document discusses using a phase transition in a substrate material to dynamically control friction. A molecular dynamics simulation models a 2D solid with a structural phase transition. It finds that the friction coefficient is non-monotonic near the critical temperature Tc, peaking at Tc. Below Tc, different substrate polarizations result in different friction forces, but this difference disappears near Tc. Increasing load makes friction more sensitive to polarization. The peak in friction at Tc occurs because thermal activation helps the tip kick atoms out of potential wells, aiding dissipation. Near Tc, substrate property correlations diverge, increasing damping and friction.

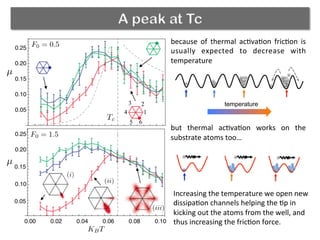
![A peak at Tc
Within
the
linear
response
theory
(Ying
et
al.
1990-‐92),
the
damping
coefficient
relates
to
the
microscopic
proper(es
of
the
substrate:
close
to
a
structural
phase
transi(on,
the
correla(on
func(ons
diverges,
the
viscous
damping
too
and
goes
to
zero.
ri
r
γ =
1
KBT
ij
Si,jU(r − r0
i )U(r − r0
j )
Sij = Ft[ ri(t)rj(t
) ]](https://image.slidesharecdn.com/sliding-170105143713/85/Sliding-over-a-phase-transition-11-320.jpg)