Download to read offline






![B. color detection
Color plays an important role in image
processing.
Each image is composed of an array of M*N pixels
with M rows and N columns of pixels [9].
Each pixel contains a certain value for red, green
and blue.
Based on the threshold values RGB colors can be
differentiated. In color detection process the
required color can be detected from an image.](https://image.slidesharecdn.com/guruprasadak-200220115119/85/SIXTH-SENCE-TECHNOLOGY-8-320.jpg)

![D. Arduino
order to control the robotic vehicle according to the input gestures given by
the user arduino uno board is used [14].
Serial communication between arduino and matlab is established wirelessly
through zigbee](https://image.slidesharecdn.com/guruprasadak-200220115119/85/SIXTH-SENCE-TECHNOLOGY-10-320.jpg)

![A. Acquiring Image
The real time video is given by the user.
The video is sliced into images at a particular frame
rate [16].
In order to obtain the intensity information, the
acquired image is converted into grayscale image.](https://image.slidesharecdn.com/guruprasadak-200220115119/85/SIXTH-SENCE-TECHNOLOGY-12-320.jpg)

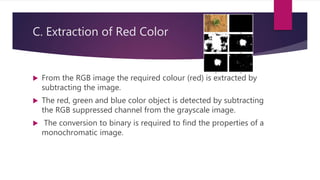








This document presents a report on controlling a robotic vehicle using 6th sense technology and gesture recognition. Gestures captured by a webcam are used to detect colored markers on the user's hands and transmit wireless commands to control the robot. The process involves acquiring the video stream, extracting the red color, converting it to binary, finding the centroid coordinates and using those coordinates for serial communication to send commands to an Arduino and control the robotic vehicle's movements.


































































