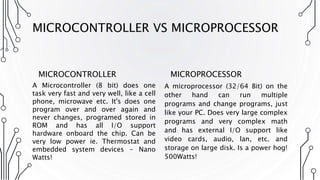
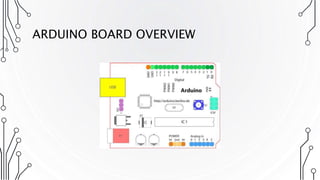
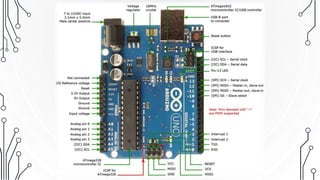
This document provides an overview of robotics and related concepts. It defines a robot and discusses the origins of the word "robot." It describes robotics as the study of designing and building robots. The document outlines the history of robotics from ancient times to modern motor-driven robots. It also covers types of robots based on function and control, the basic components of a robot, microcontrollers versus microprocessors, Arduino boards and programming, and common sensors and modules used in robotics projects.



































































![Getting Started with Apache Spark: Big Data Made Simple [Free Meetup]](https://cdn.slidesharecdn.com/ss_thumbnails/apachesparkgettingstarted-260203175547-8361bcc3-thumbnail.jpg?width=640&height=640&fit=bounds)










