This document summarizes and compares three battery simulation models of increasing complexity: a model with only state of charge (SOC) as a state, a combined model that estimates voltage as a function of SOC and current, and a zero-state hysteresis model. The zero-state hysteresis model accounts for hysteresis effects and has the lowest error compared to the test data, making it the best model. All models are fitted using a least squares estimation technique and their outputs for charge and discharge cycles are analyzed and compared.

![Models with only SOC as a state:
The first three model investigated have state vector xk = zk . That is, the only state in the state
equation is SOC. These models can estimate cell terminal voltage in a limited way, and are
improved upon later using multiple states.
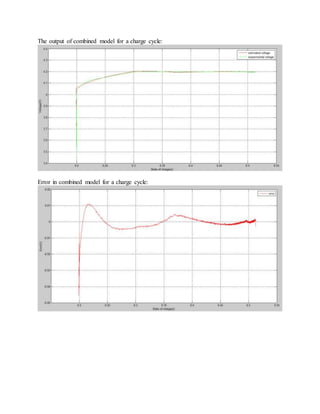
The combined model:
With SOC available as a part of the model state, terminal voltage may be predicted in a number
of different ways.
The state equations describing this model:
zk+1 = zk -
𝑛∗∆𝑡
𝐶
∗ik,
yk = K0 - Rik -
𝐾1
𝑧𝑘
- K2zk + K3ln(zk) + K4ln(1-zk).
The unknown quantities in the combined model may be estimated using a system identification
procedure. This model has the advantage of being “linear in the parameters”; that is, the
unknowns occur linearly in output equation. In order to solve the equations we proceed as
follows:
Y = [y1, y2,….., yN]T
H = [h1, h2, … , hN]T
The rows of H are
hj
T
= [1, ij
+
, ij
-
,
1
𝑧𝑗
, zj, ln(zj), ln(1-zj)] ,
Where ij
+ is equal to ij if ij > 0, ij
- is equal to ij if ij < 0, else ij
+ and ij
- are zero. Then we see that Y
= HƟ where ƟT = [K0, R+, R-, K1, K2, K3, K4] is the vector of unknown parameters. Using the
result from least square estimation technique, Ɵ comes out to be:
Ɵ=(HT
H)-1
HT
Y](https://image.slidesharecdn.com/cfda59b2-6f86-4d44-b152-a9d22a074fd3-160414052445/85/reportbattery-3-320.jpg)
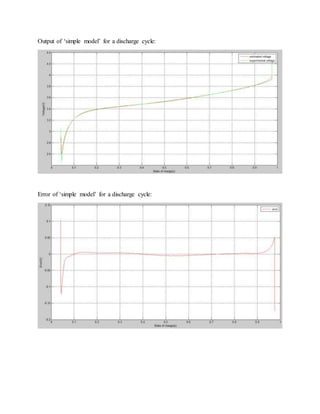
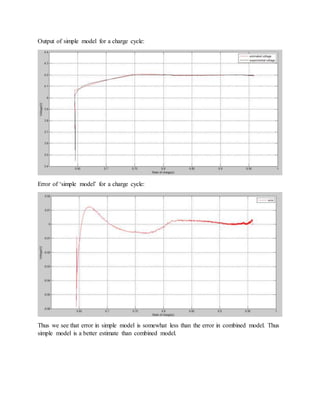
![The simple model:
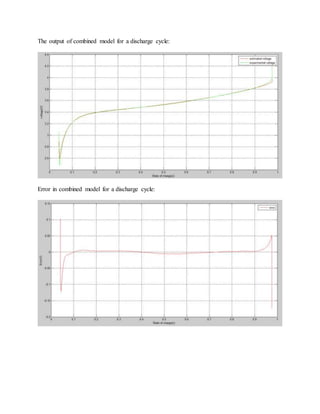
With parameter values fit to the “combined model”, we can evaluate its component terms for
further insight. The model output equation may be divided into two additive parts: one part
depending only on SOC and the other depending only on ik:
yk = {K0 -
𝐾1
𝑧𝑘
– K2zk + K3ln(zk) + K4ln(1-zk)} – {Rik}
fn(zk) fn(ik)
We see that the part of yk that is a function of SOC is attempting to fit the OCV(zk) curve. So, an
easier and more accurate implementation of the combined model is:
zk+1 = zk -
𝑛∗∆𝑡
𝐶
*ik
yk = OCV(zk) - Rik
This model type is also linear in parameters. Offline system identification is done as follows:
Y = [y1 -OCV(z1), y2 - OCV(z2), . . . , yn - OCV(zn)]T
,
H = [h1, h2, . . . , hn]T
.
The rows of H are
hj
T
= [ij
+
, ij
-
].
Again, we see that Y = Hθ, where θT = [R+, R-] is the vector of unknown parameters. We solve
for the parameters θ using the known matrices Y and H as θ = (HTH)-1HTY.](https://image.slidesharecdn.com/cfda59b2-6f86-4d44-b152-a9d22a074fd3-160414052445/85/reportbattery-6-320.jpg)
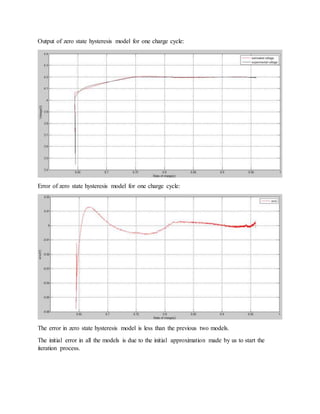
![The zero-state hysteresis model:
Examination of the previous results exposes some flaws in the models. One subtle effect, which
has serious consequences when predicting SOC, may be seen during rest periods. Following a
discharge, the cell voltage always relaxes to a value less than the true OCV for that SOC, and
following a charge, the cell voltage always relaxes to a value greater than the true OCV. This is
explained by a hysteresis effect occurring in the cell that is not modeled in the combined or
simple models.
A basic model of hysteresis simply adds a term to the output equation:
zk+1 = zk -
𝑛∗∆𝑡
𝐶
*ik
yk = OCV(zk) – skM(zk) - Rik
Where sk represents the sign of the current (with memory during a rest period). For some ƞ
sufficiently small and positive,
1, ik > ƞ
sk = -1, ik< ƞ
sk-1, |ik |<= ƞ
M(zk) is half the difference between the two legs of charge/discharge curve, minus the Rik loss.
This model type is also linear in the parameters. Off-line system identification is done as follows:
Y = [y1 −OCV(z1), y2 − OCV(z2), . . . , yn − OCV(zn)]T
,
and the matrix
H = [h1, h2, . . . , hn]T
.
The rows of H are
hj
T
= [ij
+
, ij
-
, sj].](https://image.slidesharecdn.com/cfda59b2-6f86-4d44-b152-a9d22a074fd3-160414052445/85/reportbattery-9-320.jpg)
![Again, we see that Y = Hθ, where θT = [R+, R-, M] is the vector of unknown parameters. We
solve for the parameters θ using the known matrices Y and H as θ = (HTH)-1HTY.
Output of zero state hysteresis model for a discharge cycle:
Error of zero state hysteresis model for one charge cycle:](https://image.slidesharecdn.com/cfda59b2-6f86-4d44-b152-a9d22a074fd3-160414052445/85/reportbattery-10-320.jpg)




























![REAL_TIME_ESTIMATION_OF_SOC_AND_SOH[1].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/realtimeestimationofsocandsoh1-241216082315-d72b8b6e-thumbnail.jpg?width=640&height=640&fit=bounds)