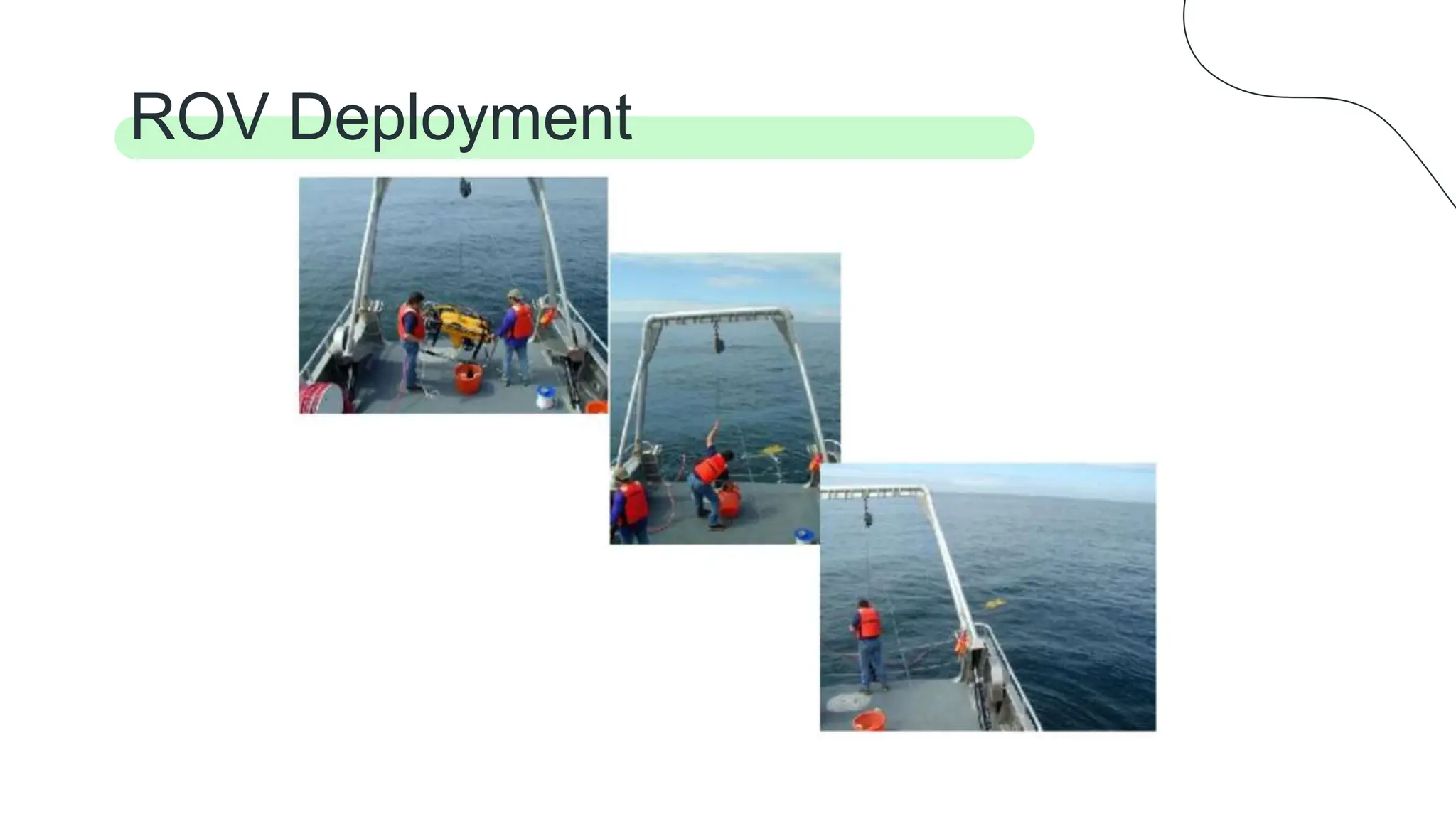
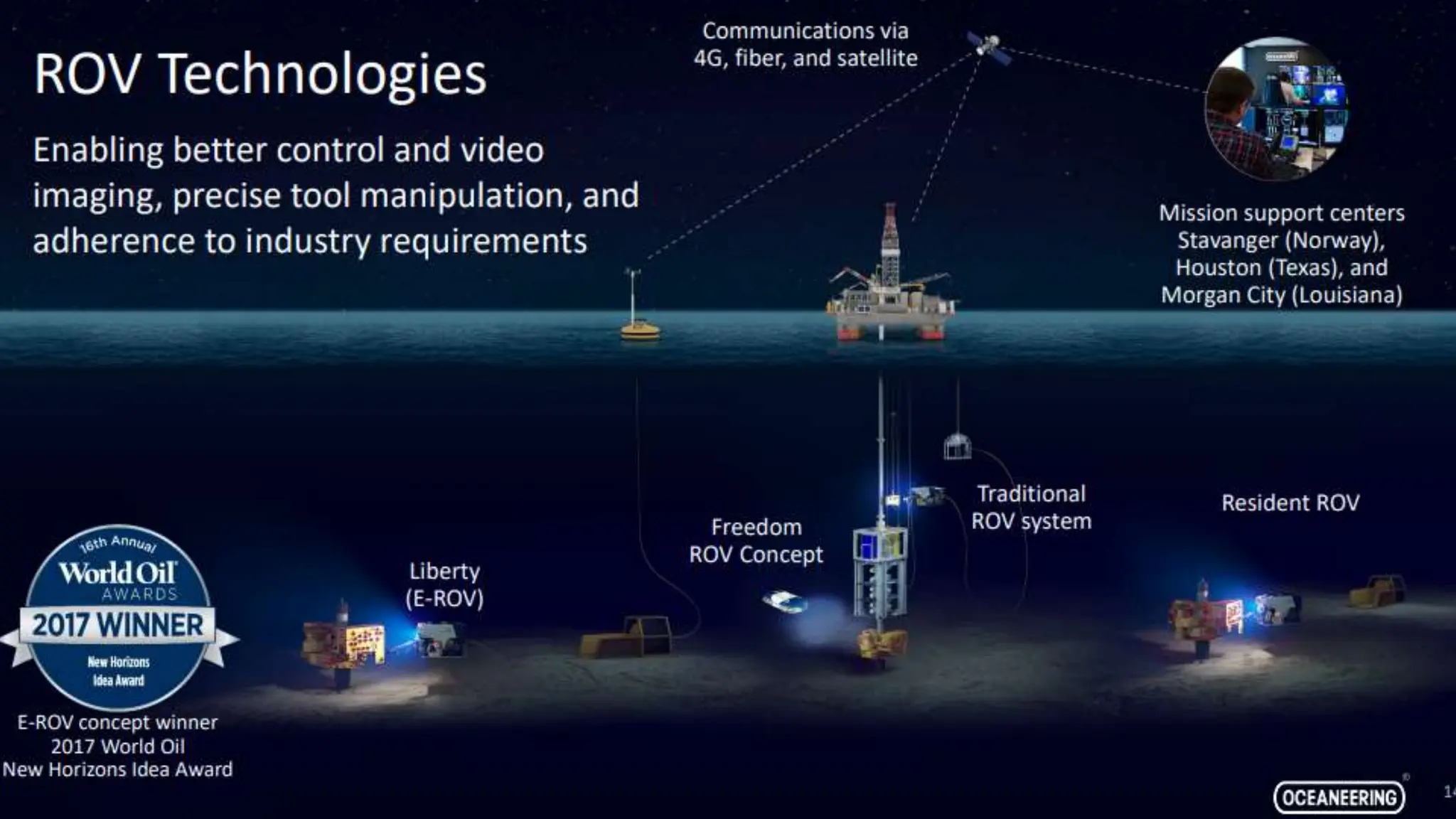
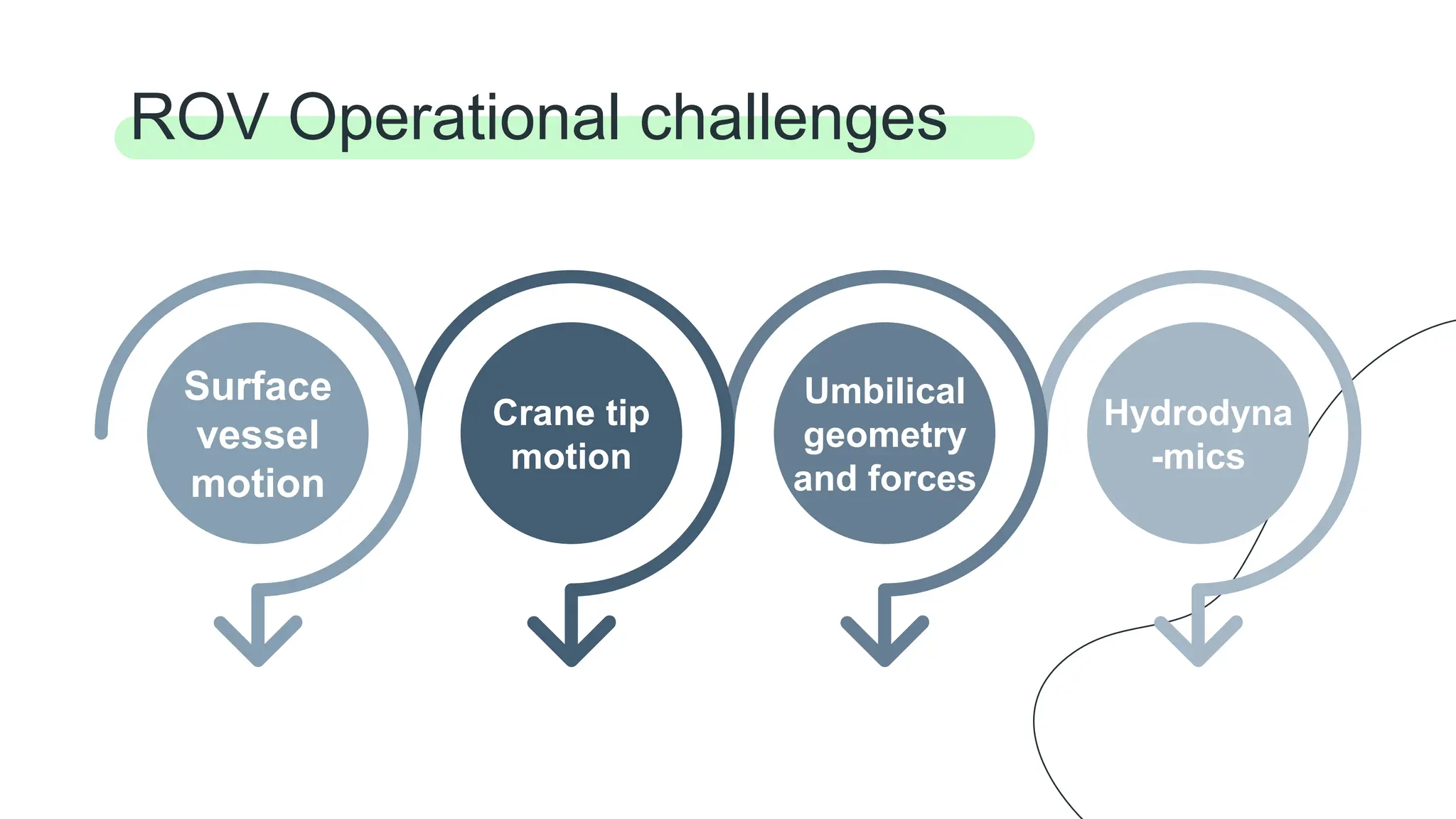
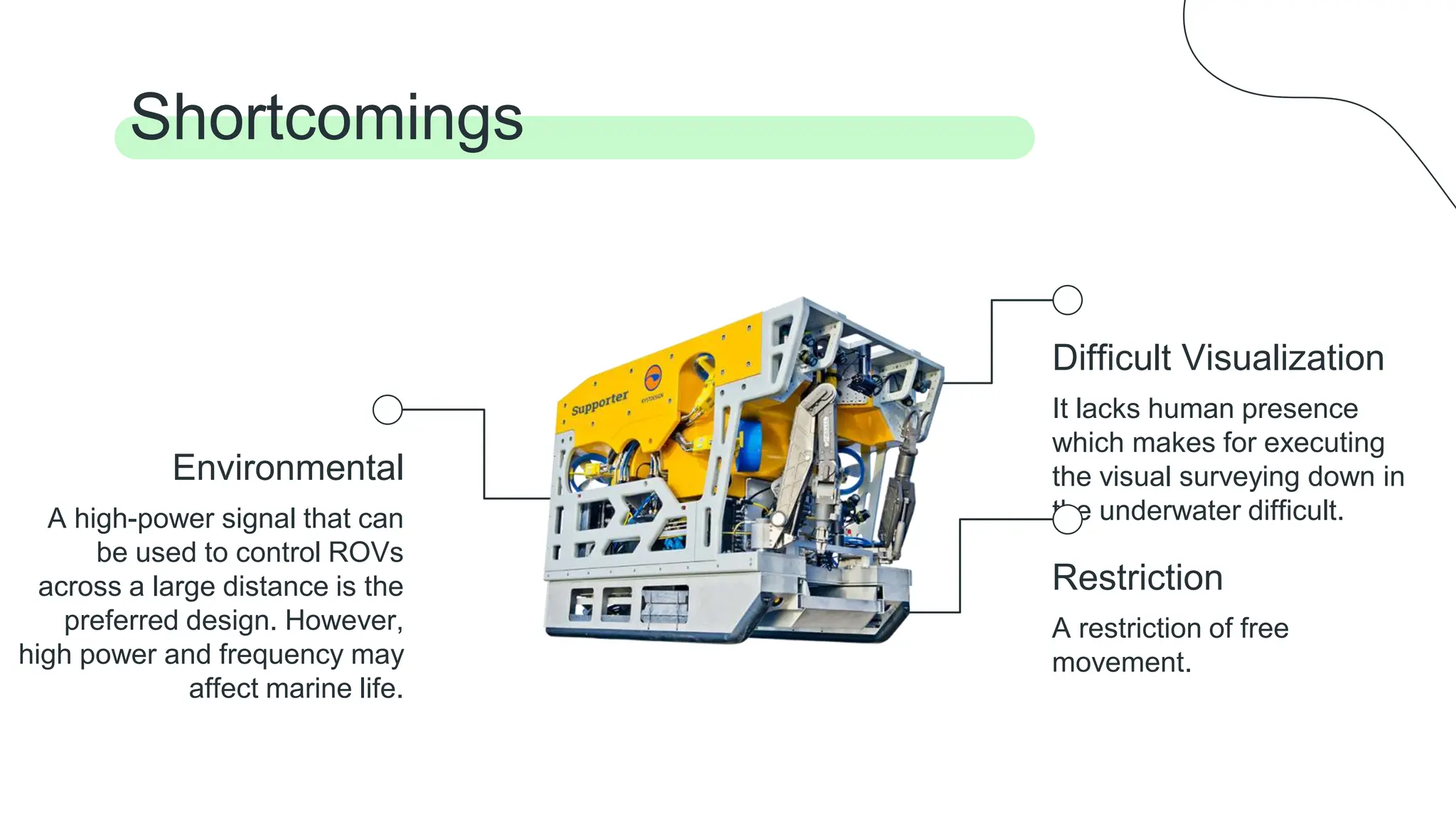
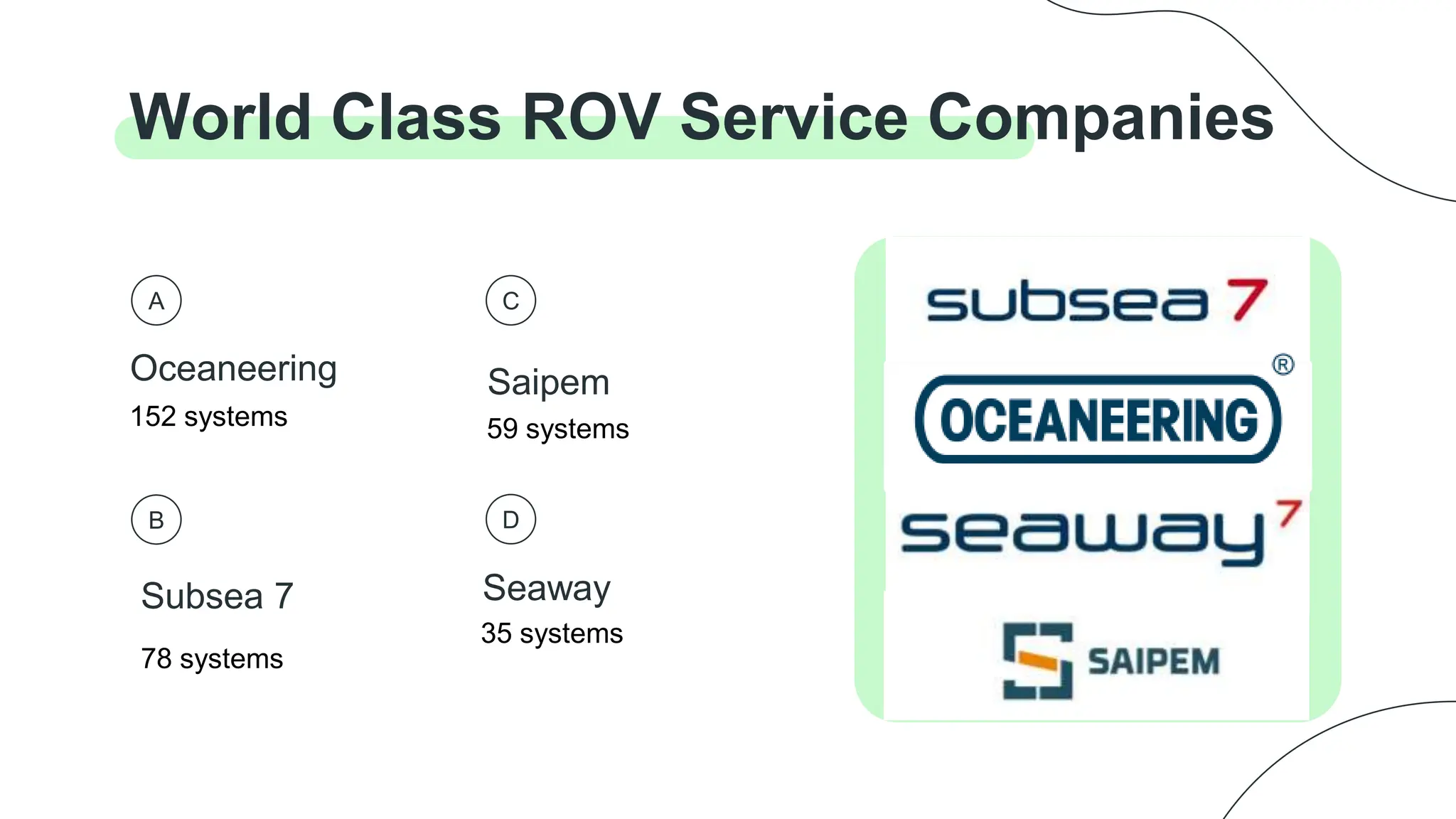
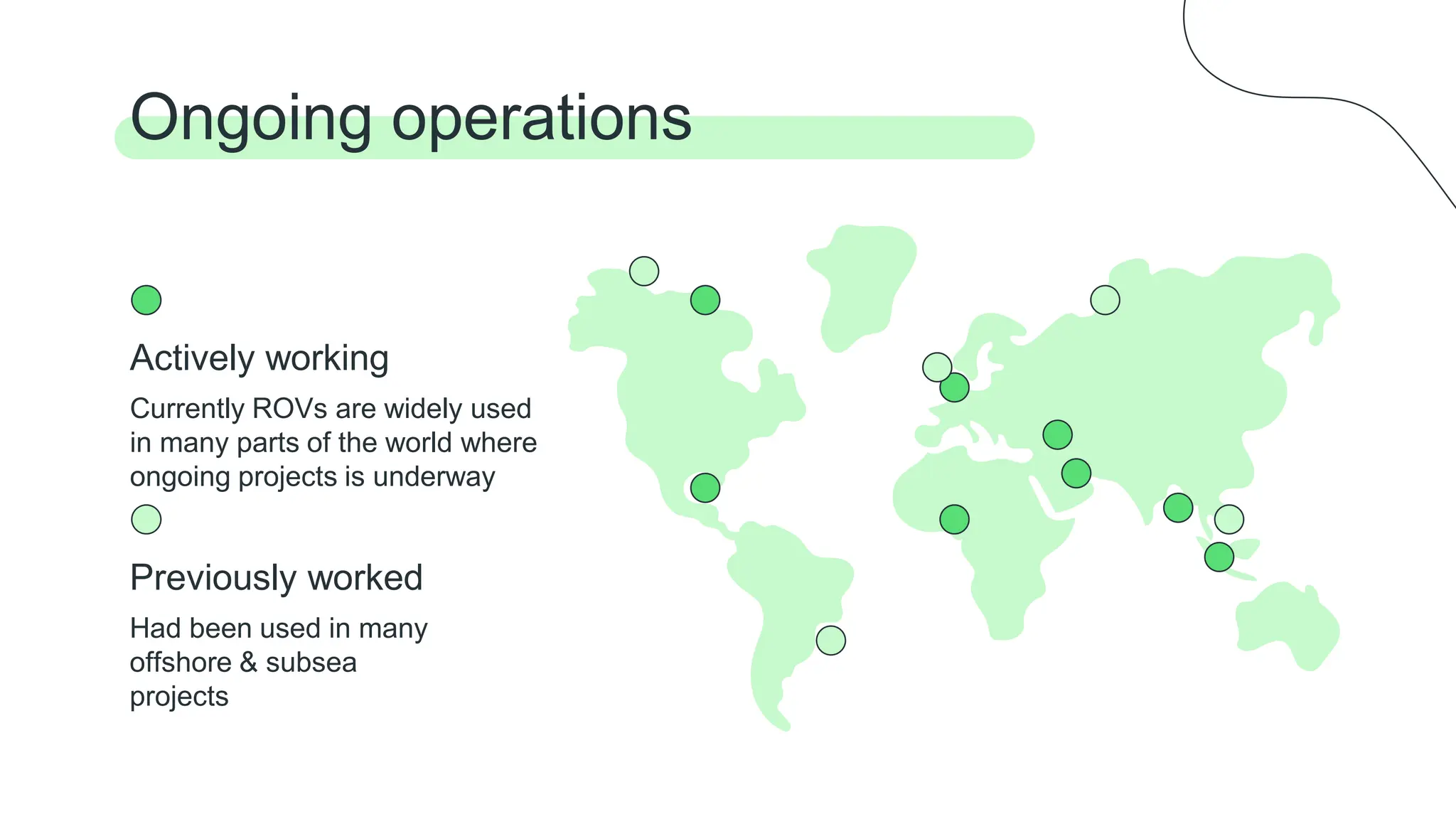
An ROV is an unmanned underwater vehicle that is tethered and operated remotely, using sensors and tools to collect data, powered through an umbilical cable connecting it to the operator. ROVs come in different classes based on their tasks and capabilities, and are used widely for inspection, sampling, testing and mechanical work but face challenges from restrictions of movement and visualization as well as potential environmental impacts. Major ROV service companies operate large fleets of ROVs across the world on ongoing offshore and subsea projects.