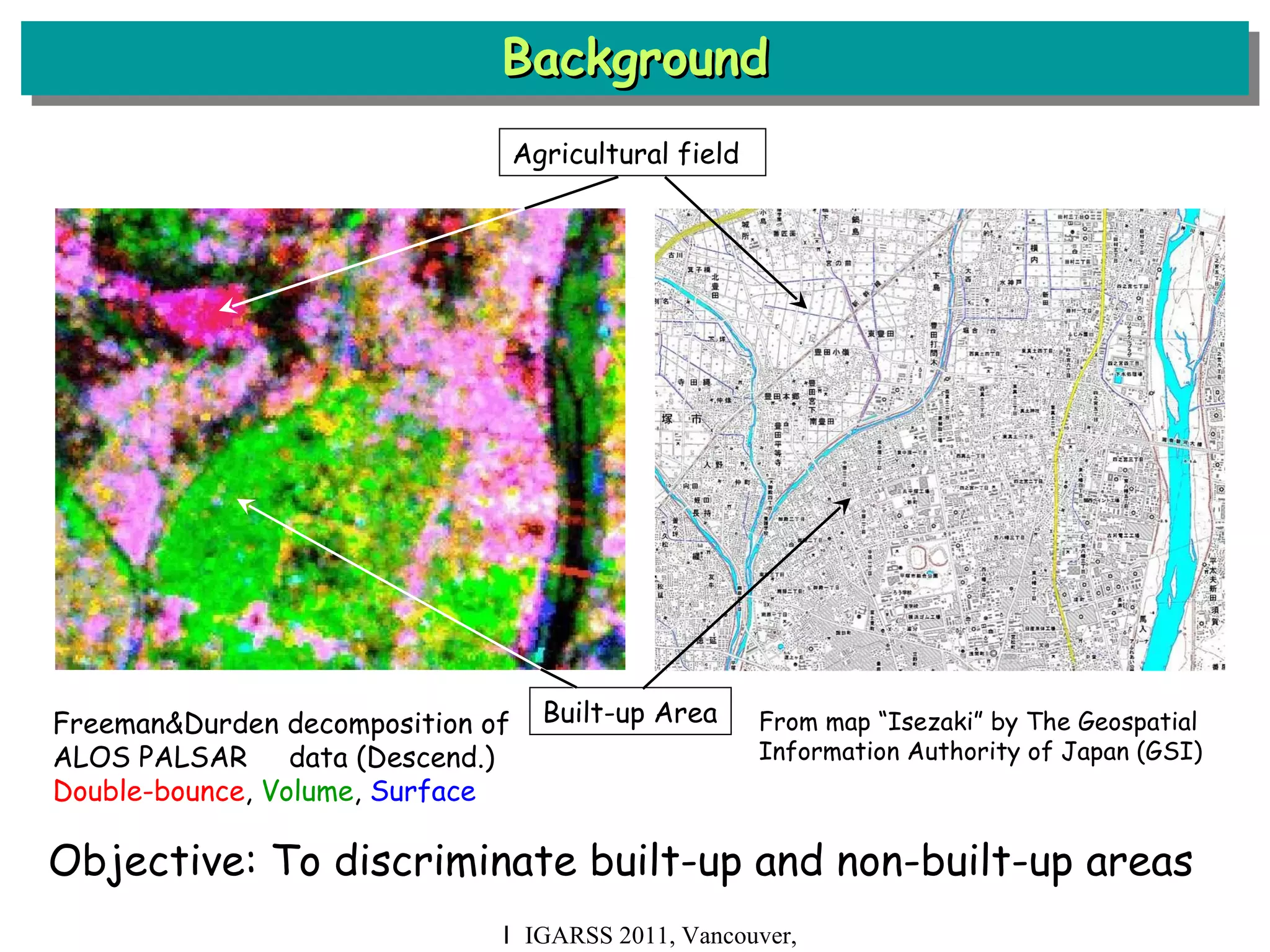
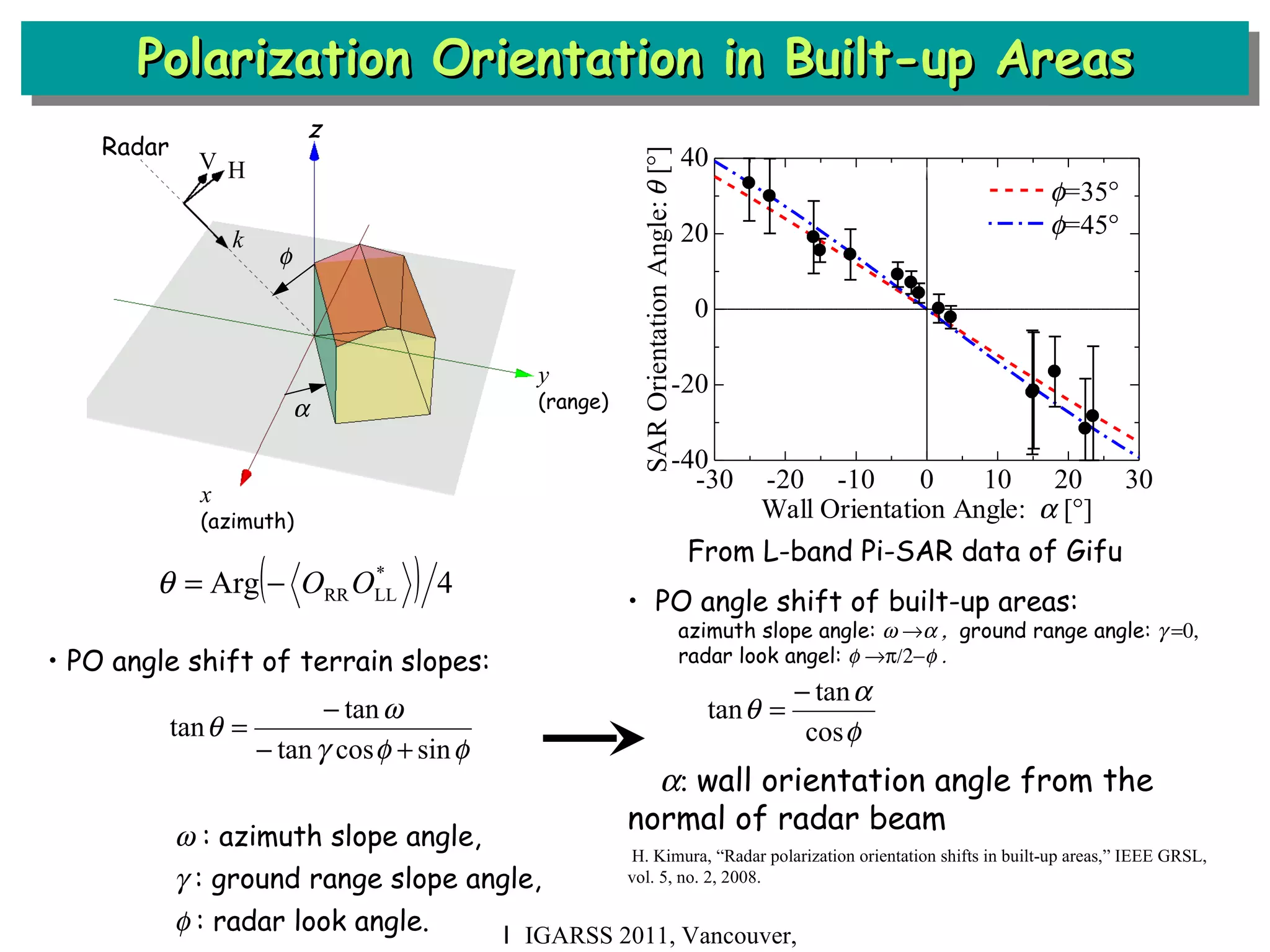
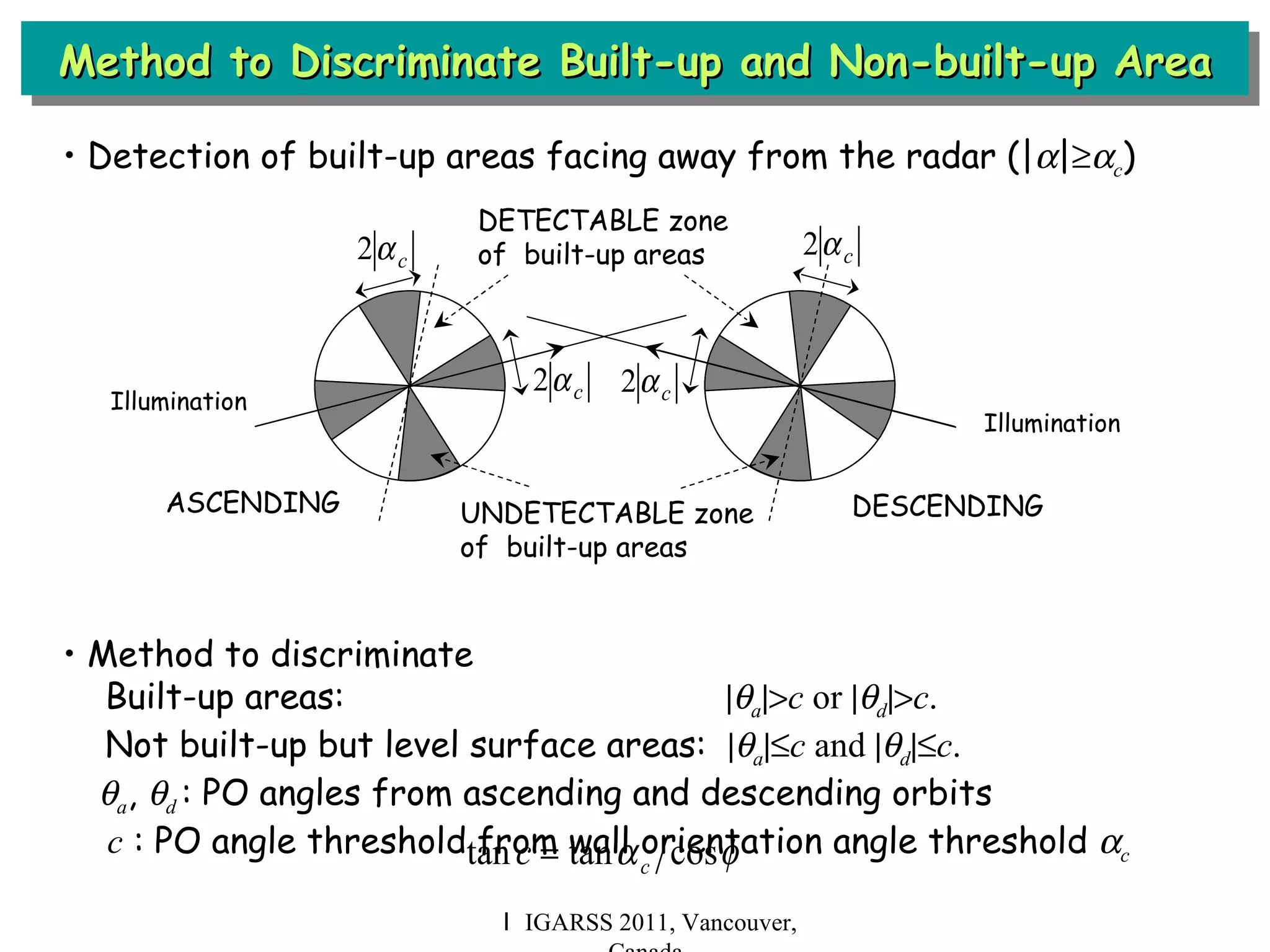
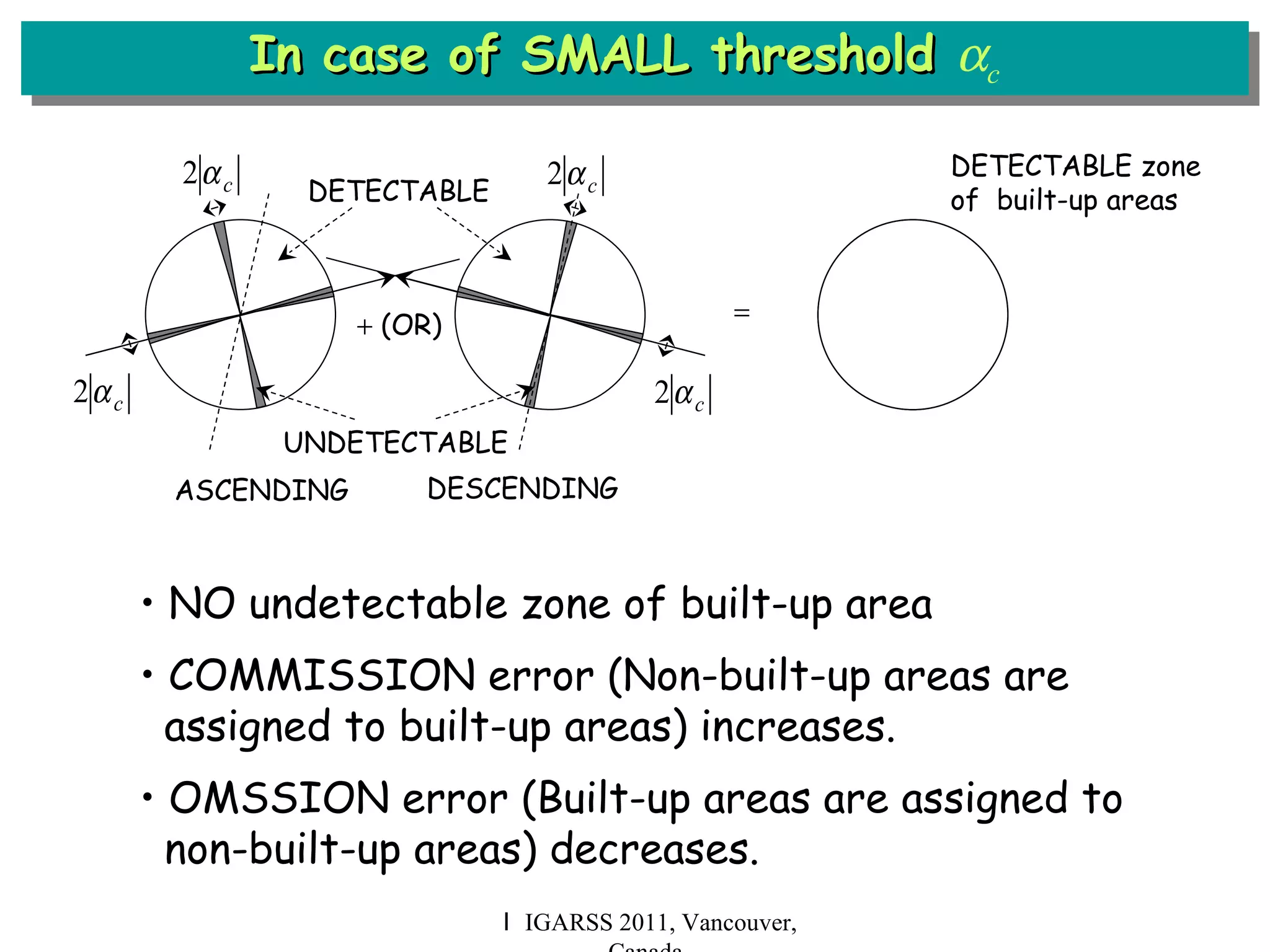
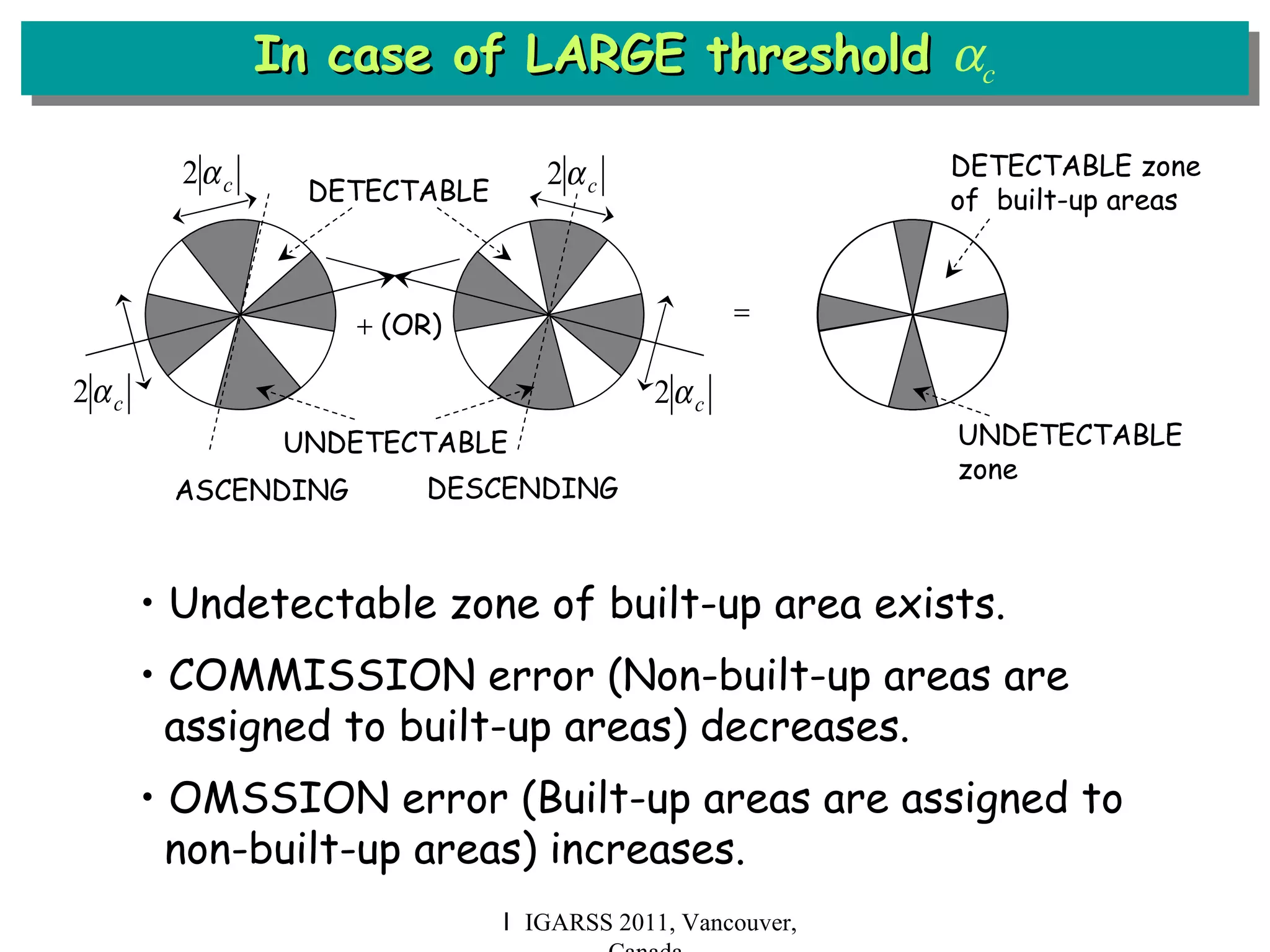
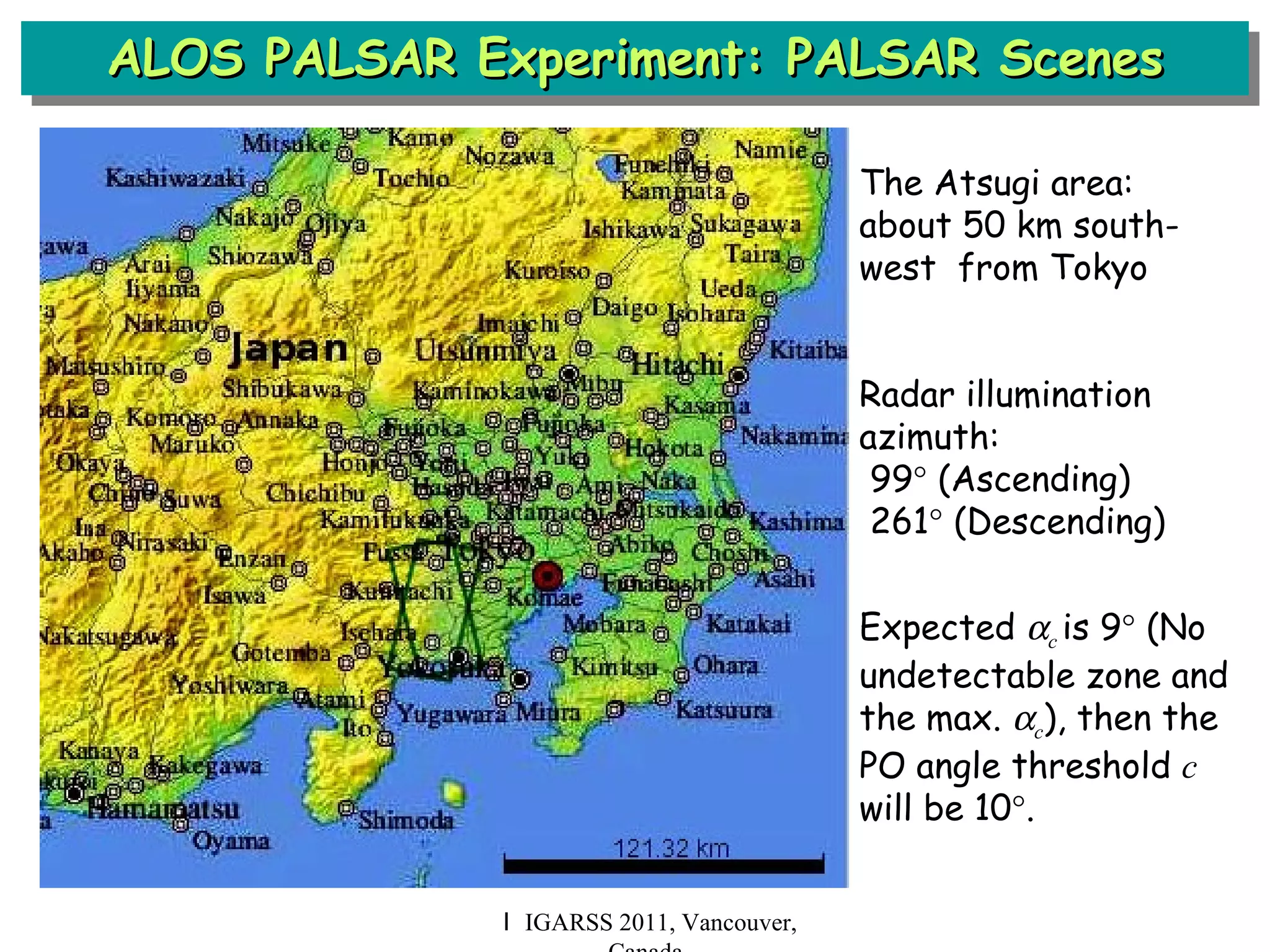
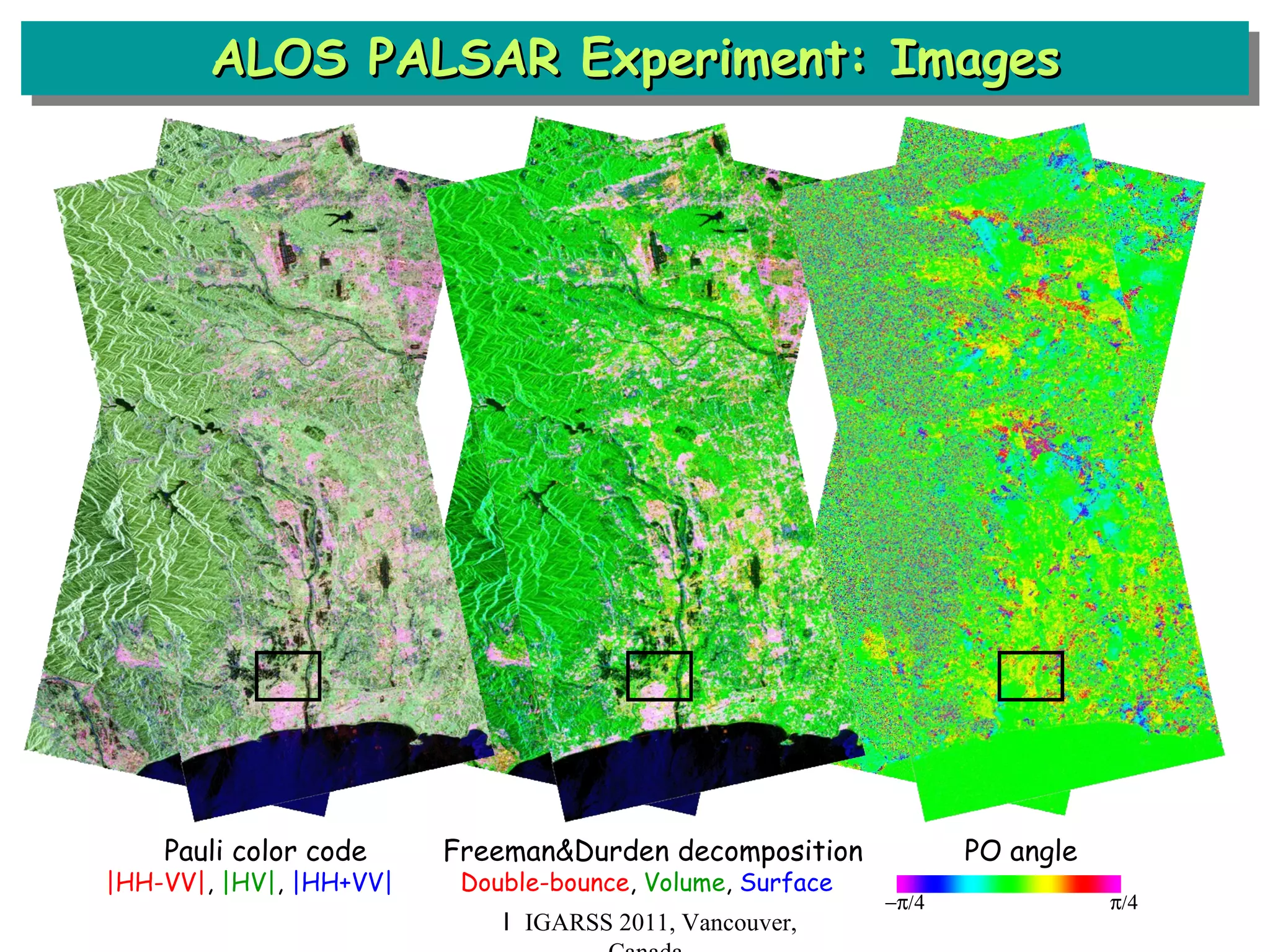
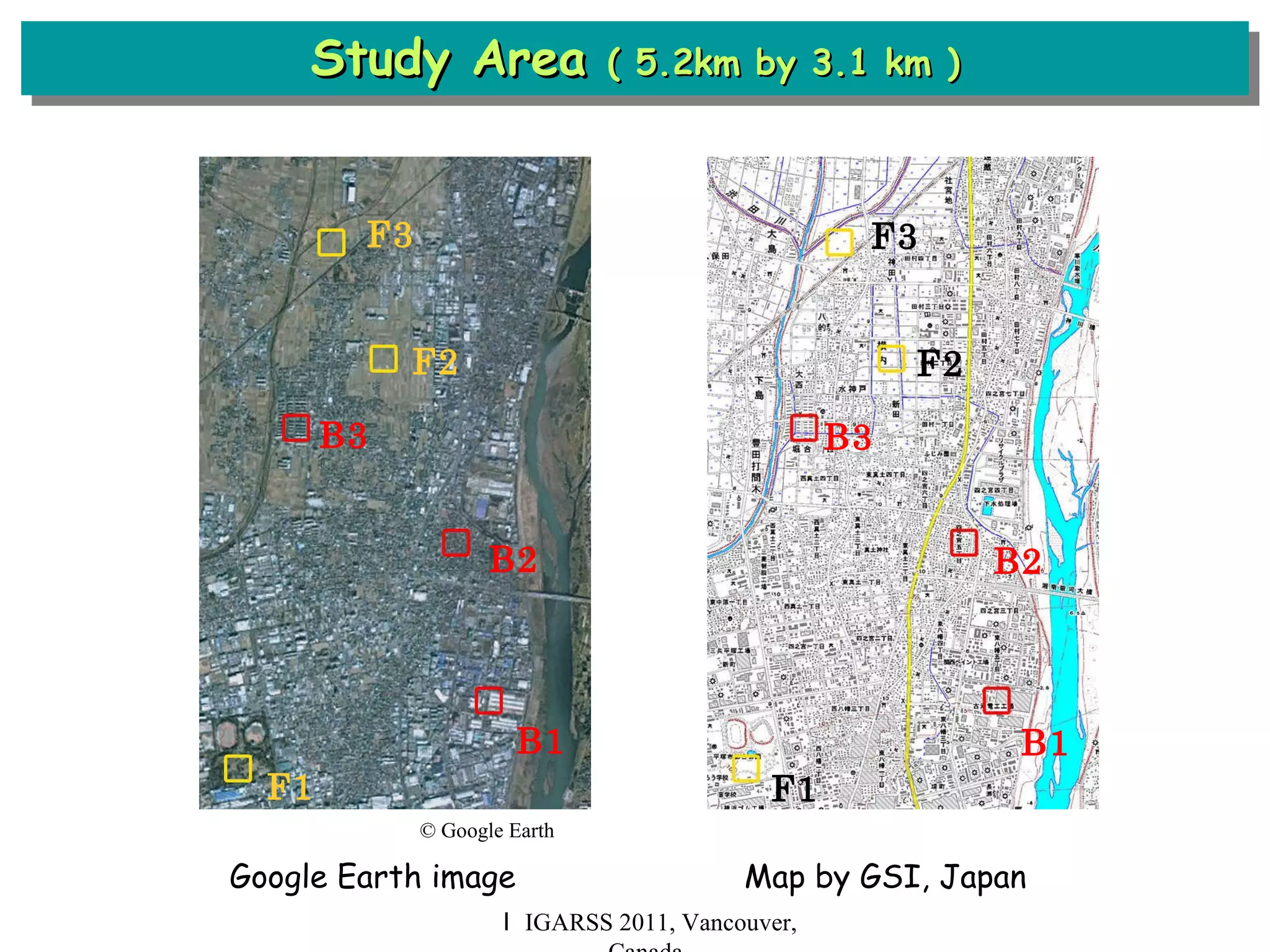
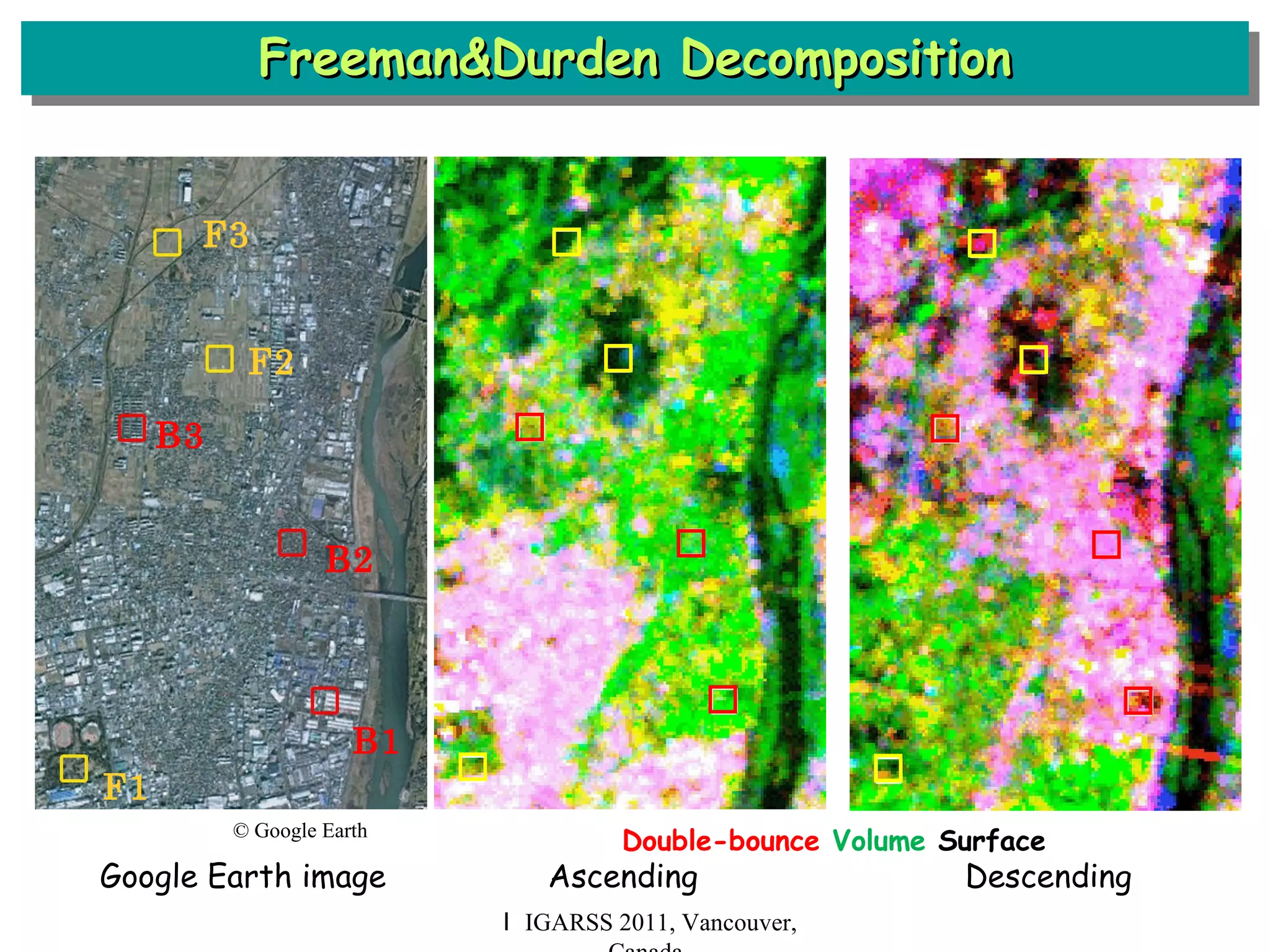
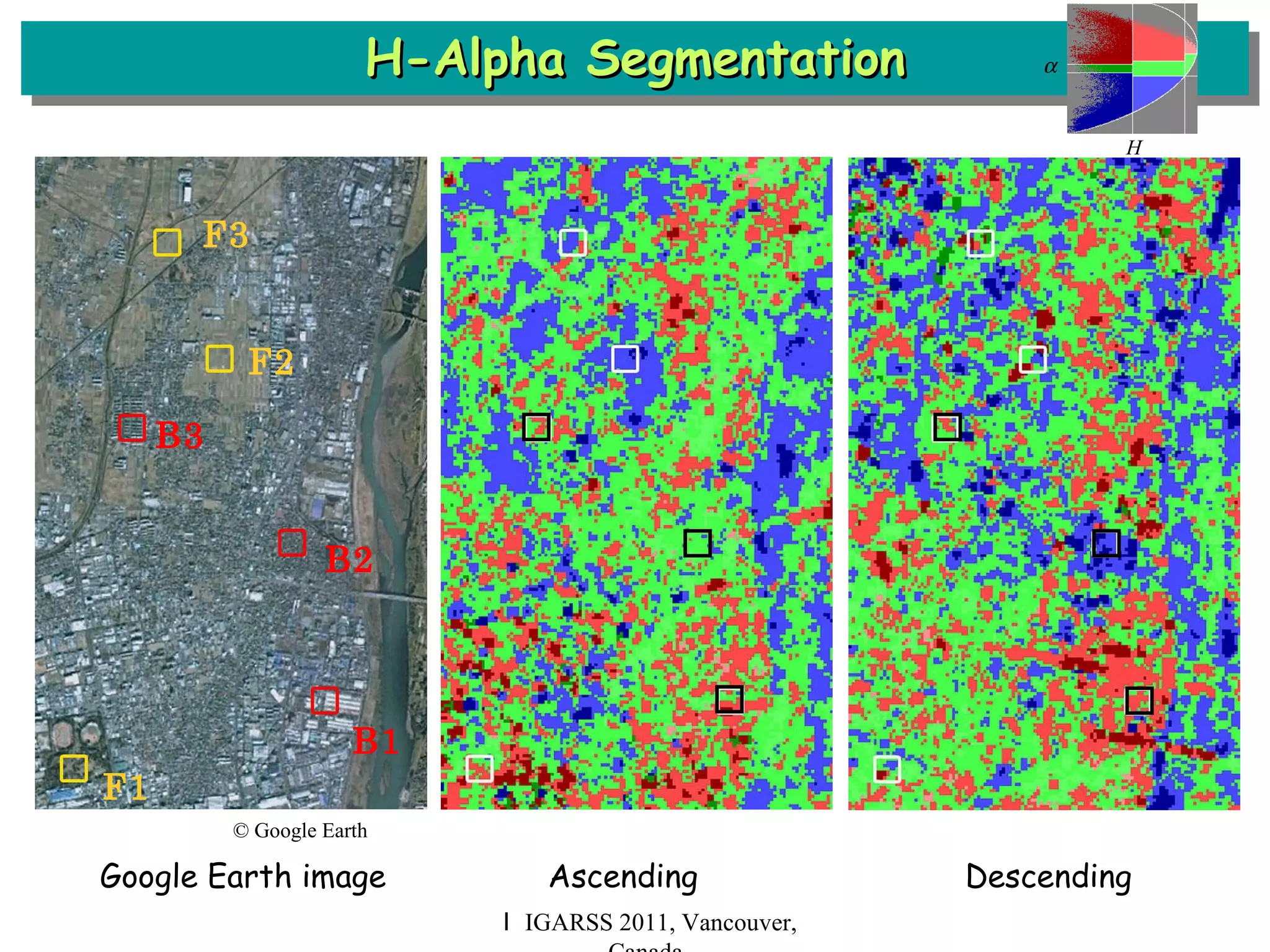
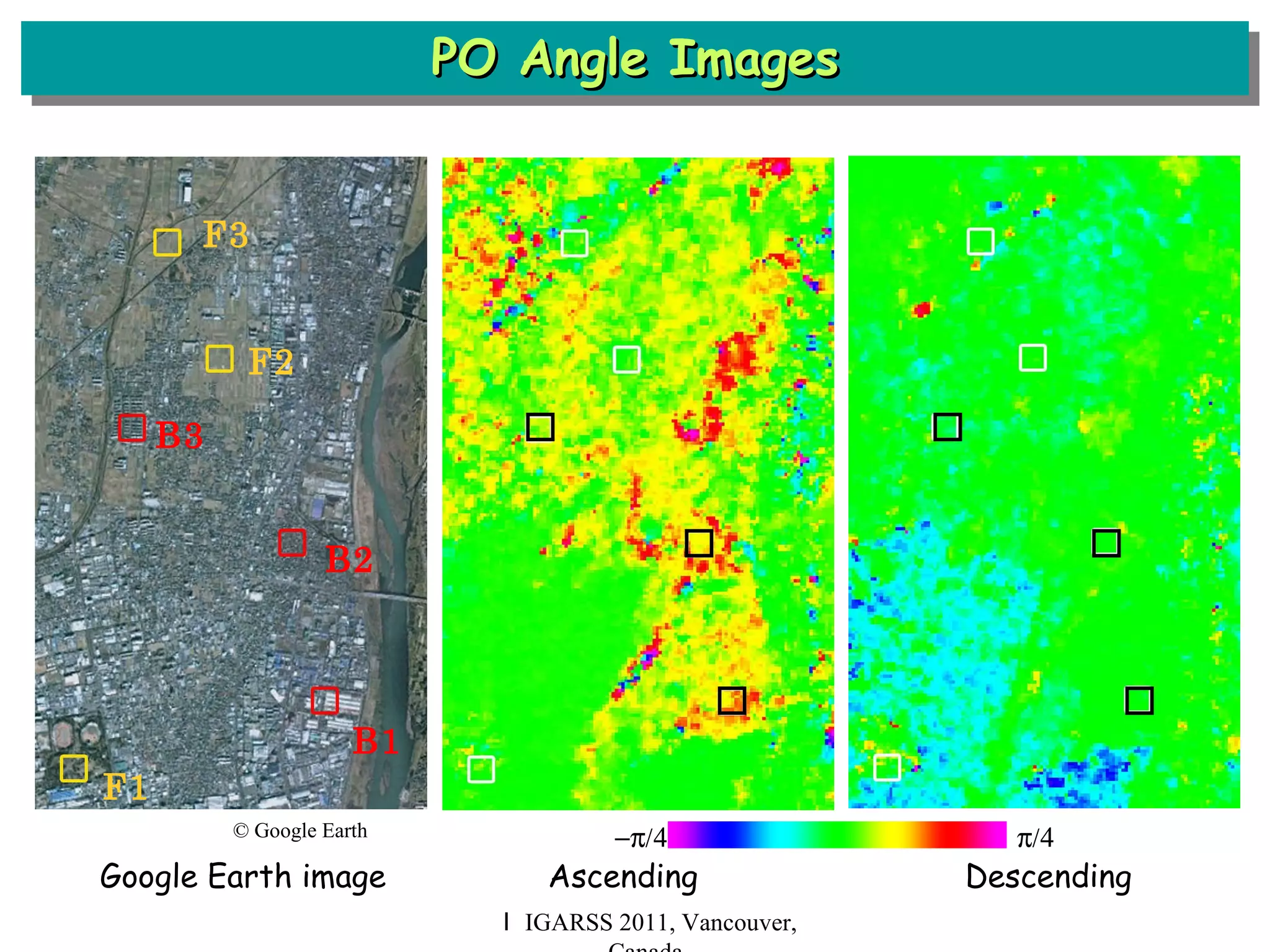
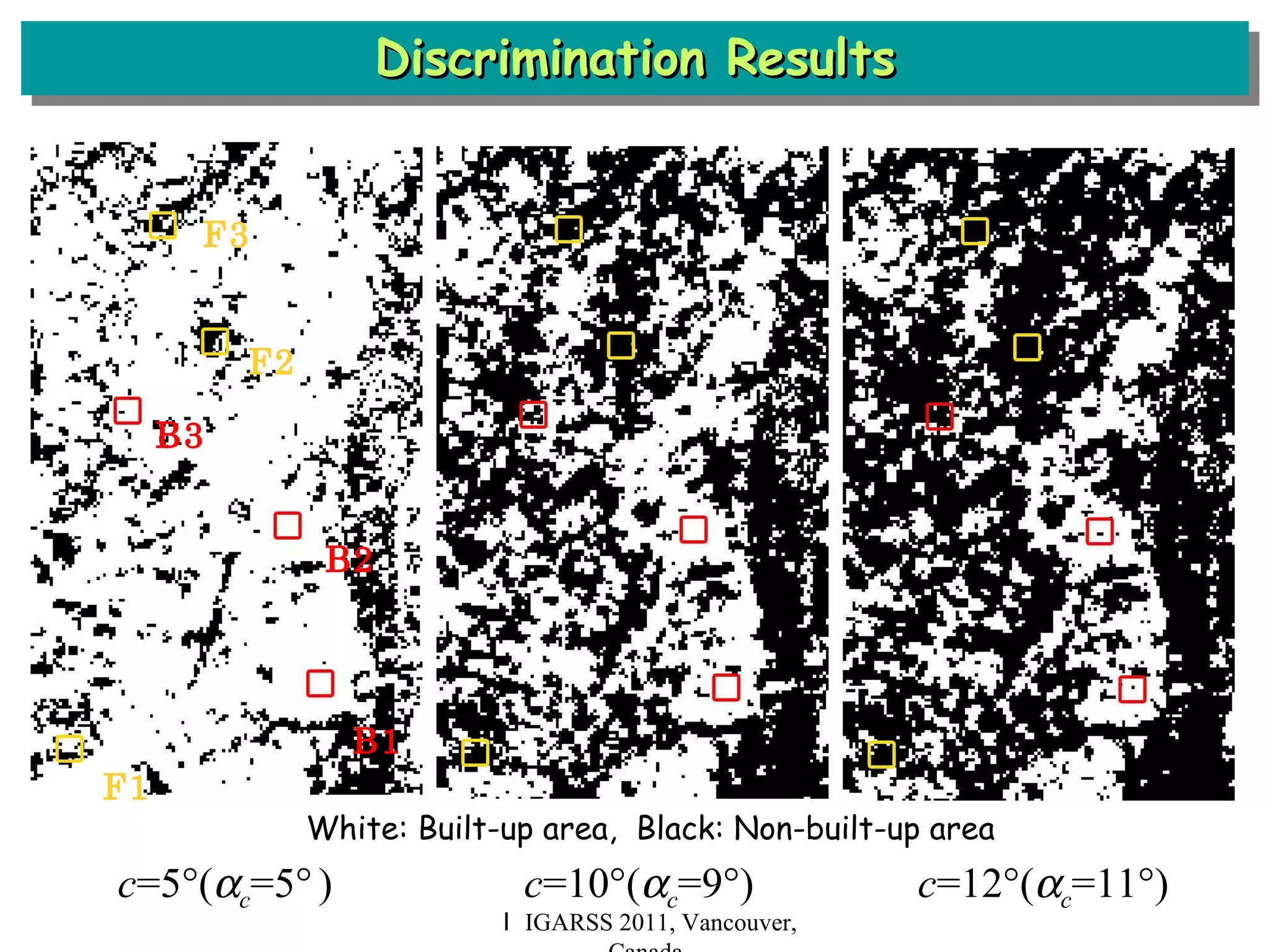
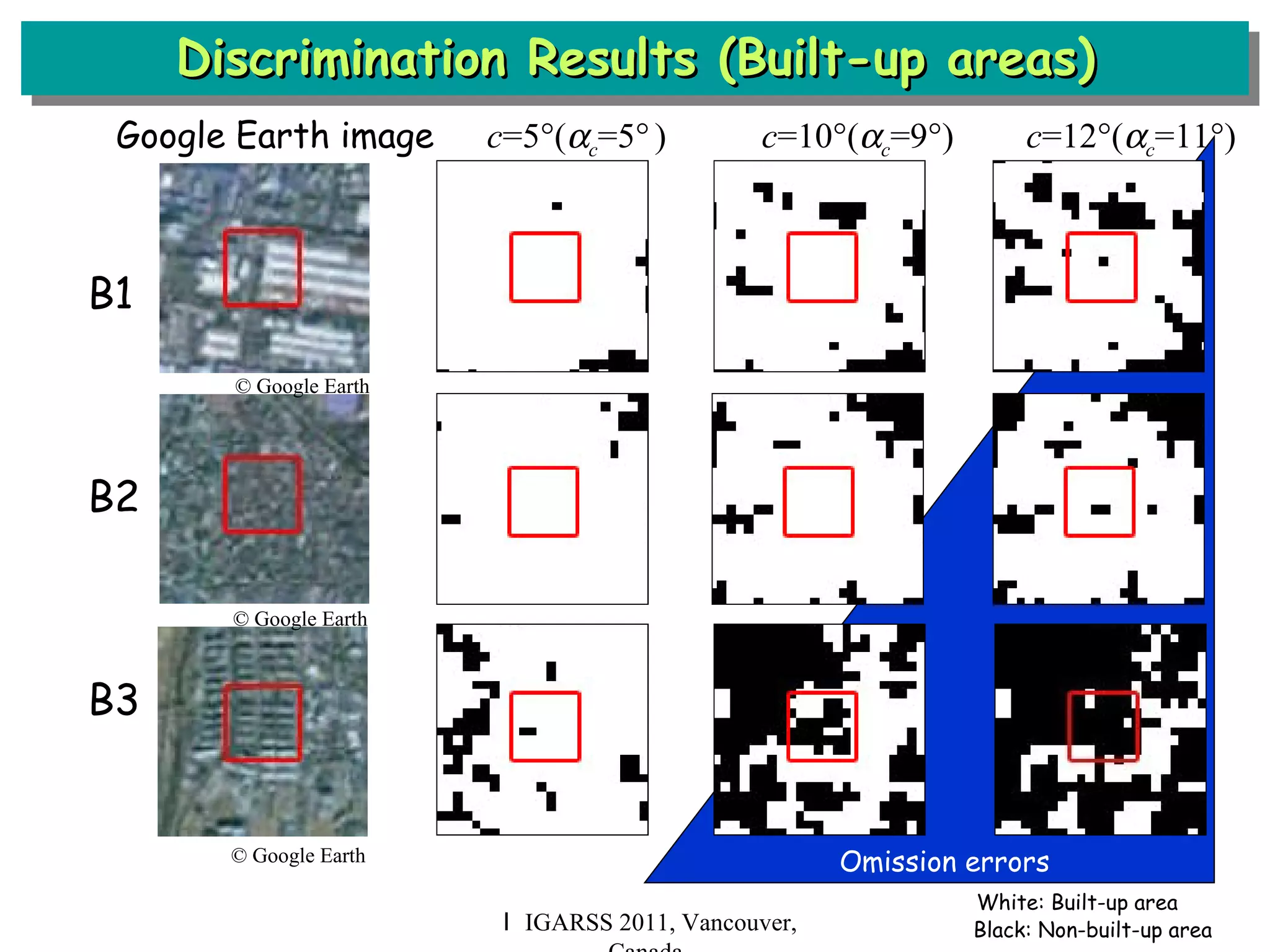
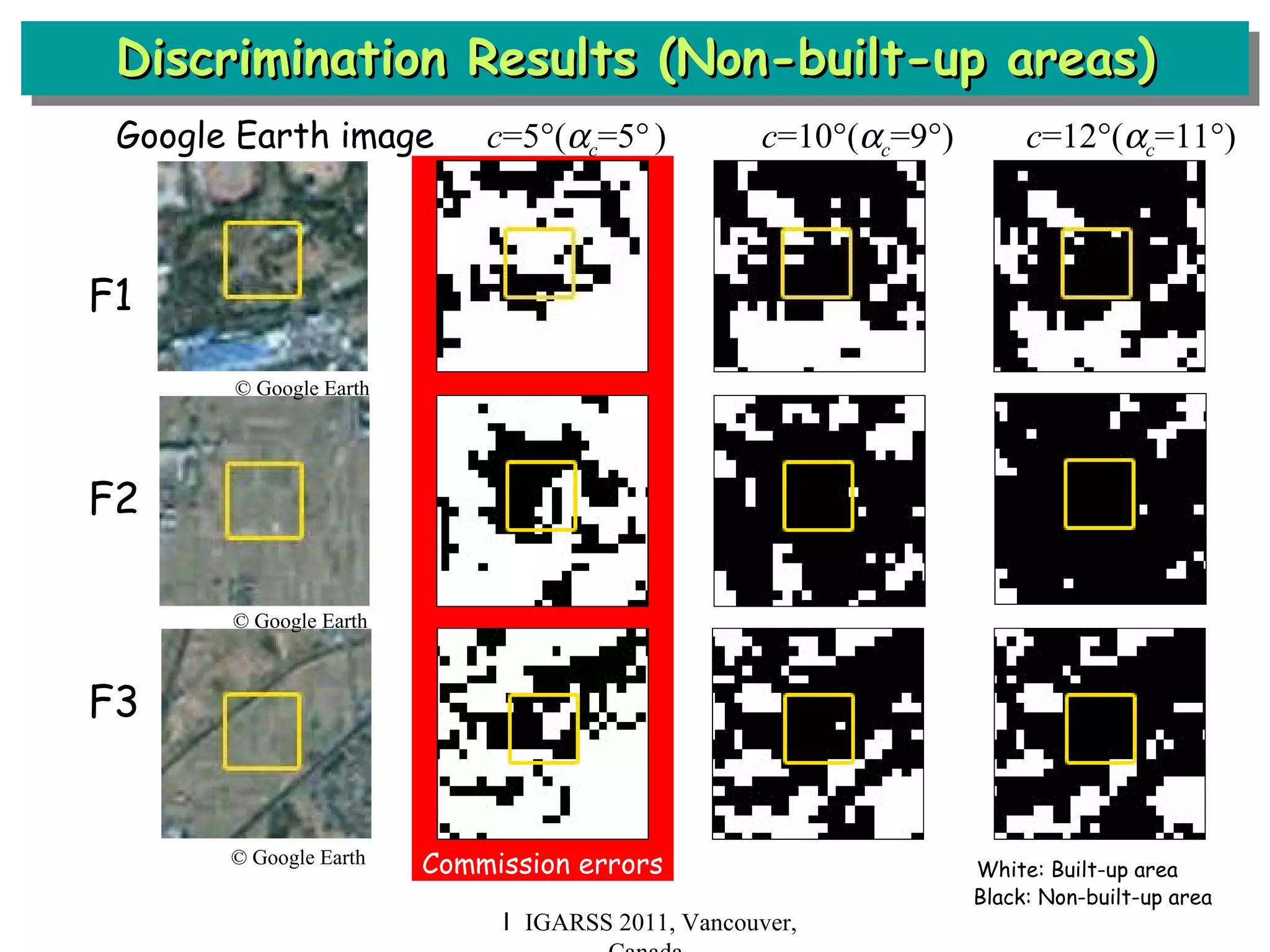
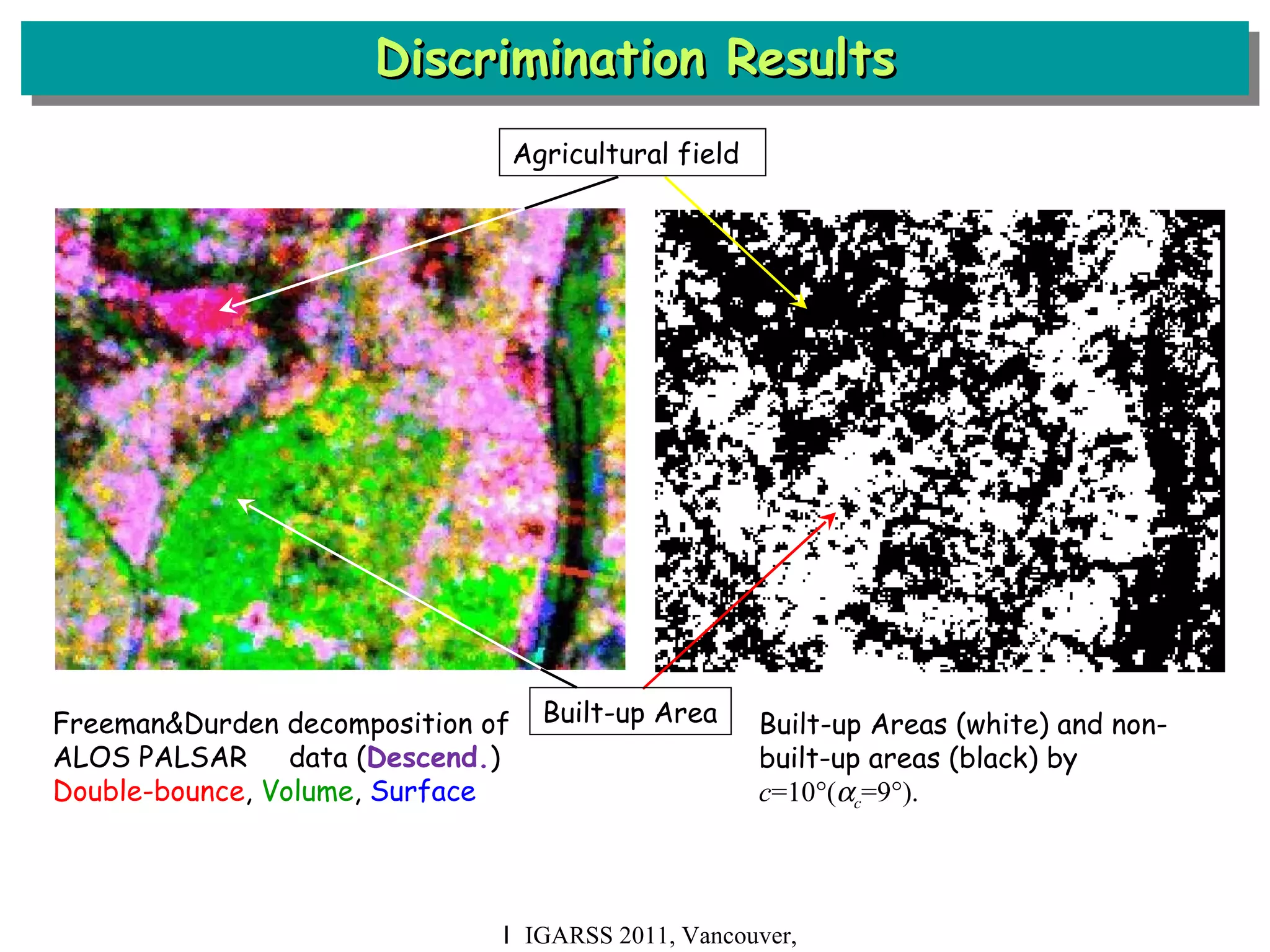
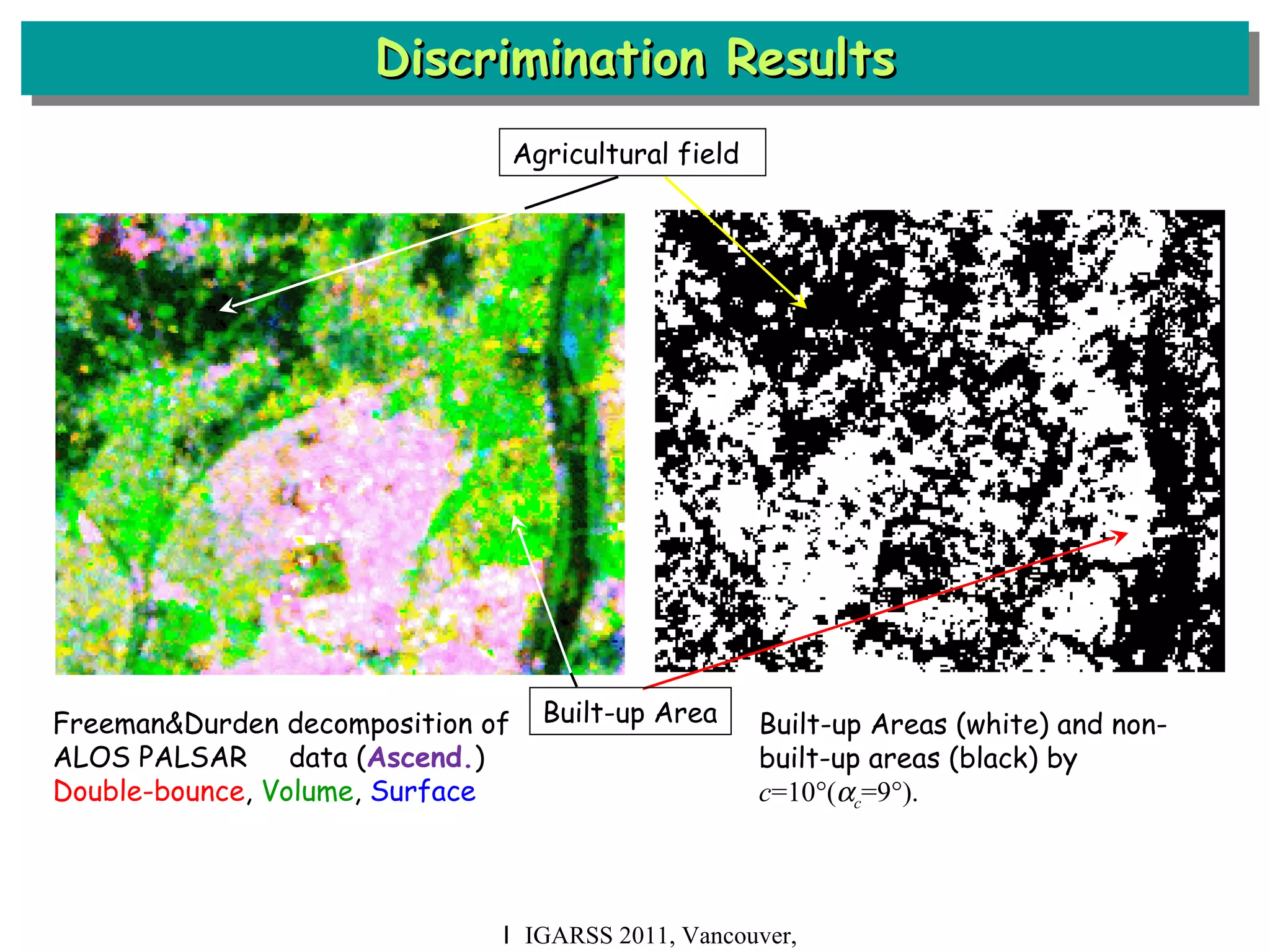
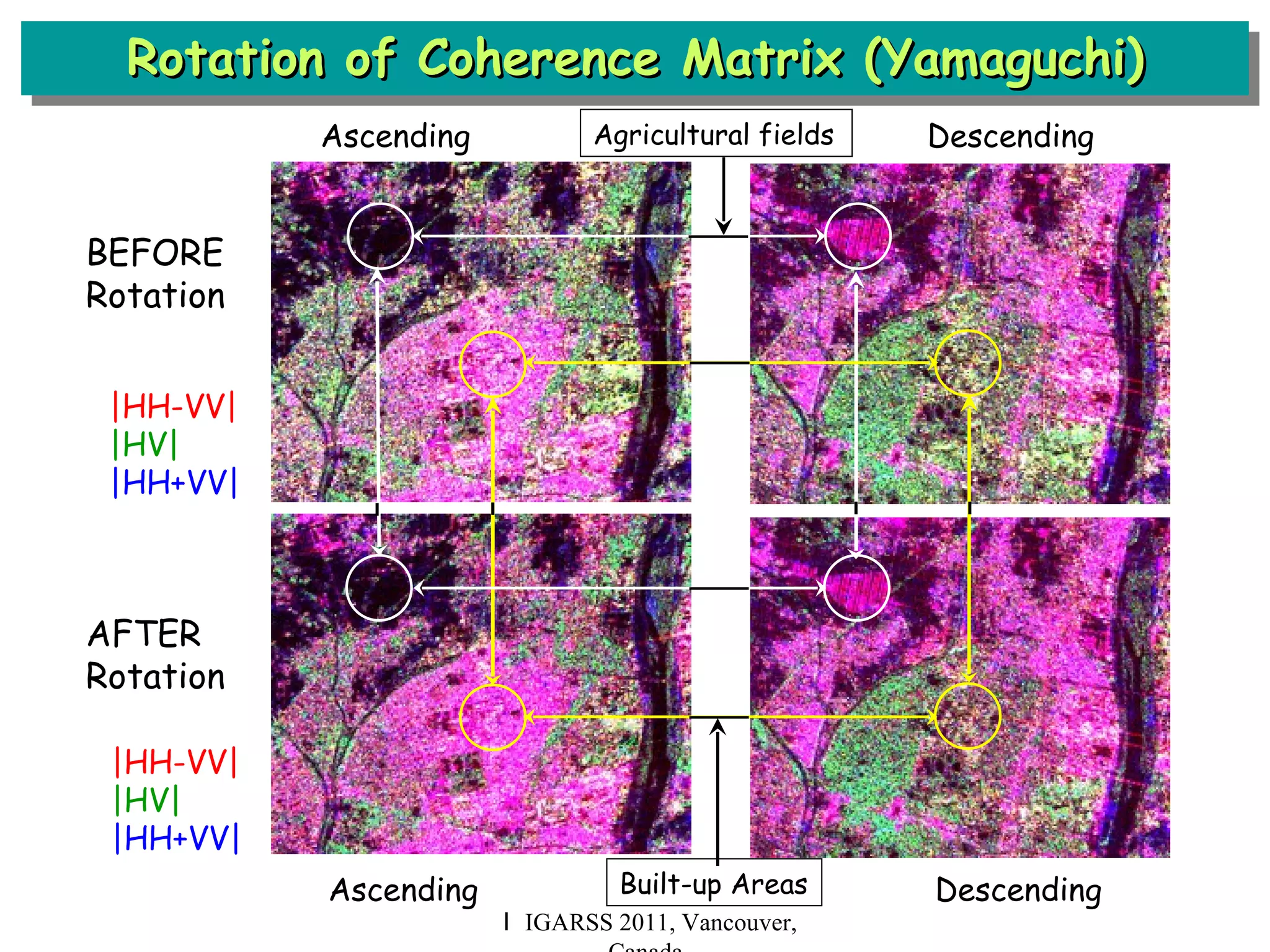
The document discusses using polarimetric orientation (PO) for polarimetric synthetic aperture radar (POLSAR) classification and decomposition to discriminate between built-up and non-built-up areas. It presents a method that uses the PO angles from ascending and descending orbits to identify built-up areas facing away from the radar based on a PO angle threshold. An experiment using ALOS PALSAR data demonstrates the method and shows that it prevents misleading interpretations from POLSAR decomposition and classification by accounting for the influence of radar illumination direction.