This document discusses solutions to the reader-writer problem using different synchronization approaches:
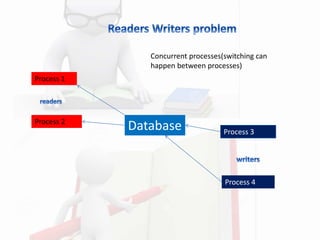
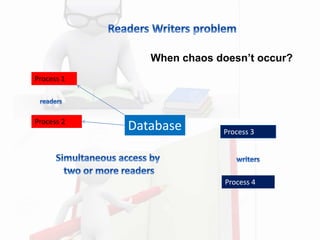
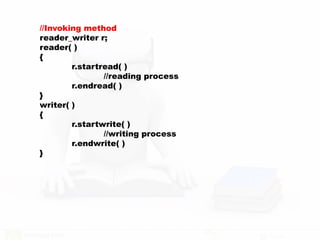
1. The reader-writer problem involves synchronizing access to a shared database between concurrent reading and writing processes.
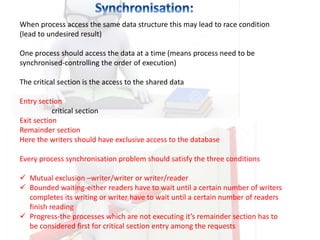
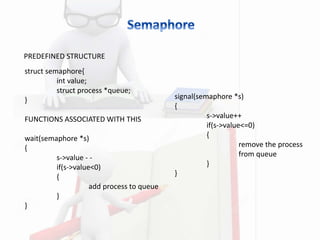
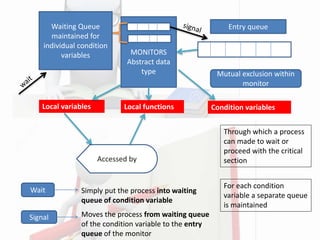
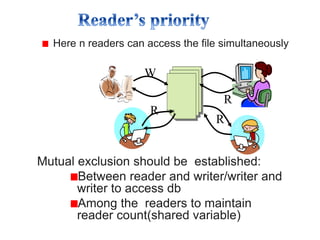
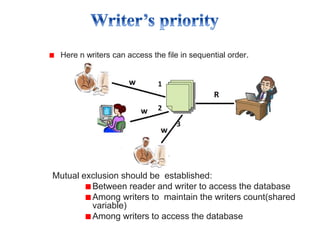
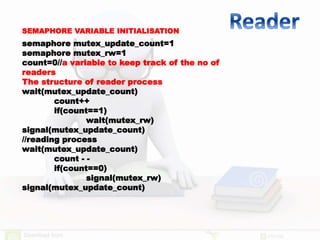
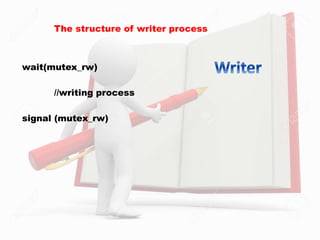
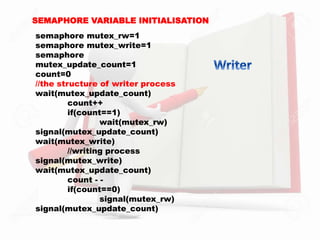
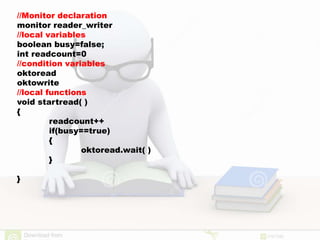
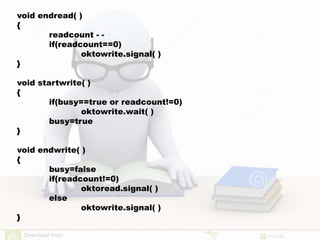
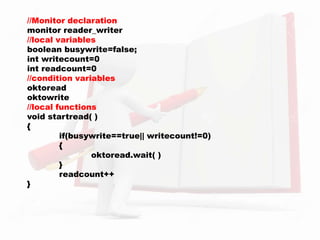
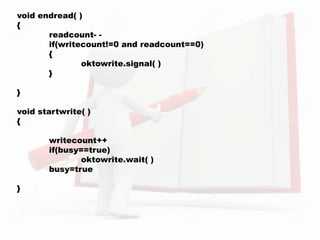
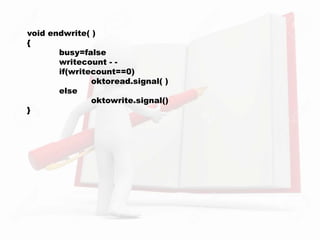
2. Solutions are presented using semaphores and monitors to enforce mutual exclusion and ensure bounded waiting and progress.
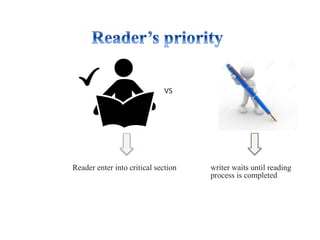
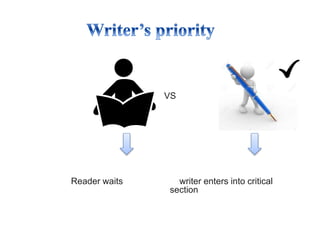
3. Specifically, algorithms are provided that give either reader priority or writer priority access to the database using semaphores and monitors.