Download to read offline

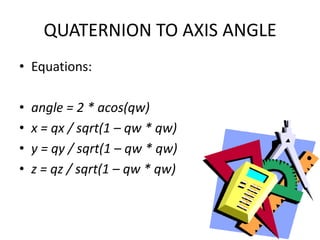
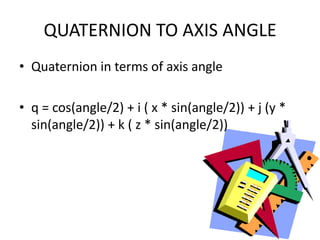
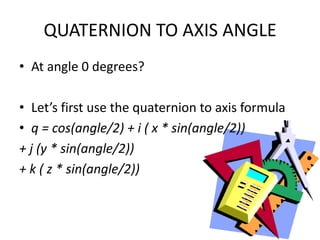
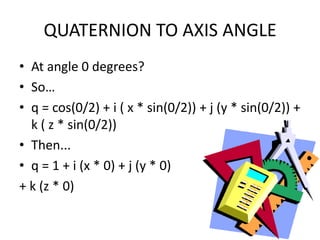

The document discusses converting between quaternions and axis-angle representations of rotation. A quaternion contains 4 variables (qw, qx, qy, qz) that define a rotation. An axis-angle representation uses an axis vector (ax, ay, az) and a rotation angle. The document provides equations to convert between the two representations and works through examples, such as a 90 degree rotation around the x-axis yielding the quaternion (0.7071, 0.7071, 0, 0). It also derives the axis-angle to quaternion conversion equations from trigonometric identities.