Modelimi dhe simulimii procesve
industriale me ndihmën e qarqeve
elektrike
Diplomanti: Udhëheqësi:
Fatjon DASHHANA Dr.Thomaq KOBLARA
2.
Hapat e punës
Procesetindstriale.
Modelimi i proceseve industriale.
Modeli matematik i procesit industrial.
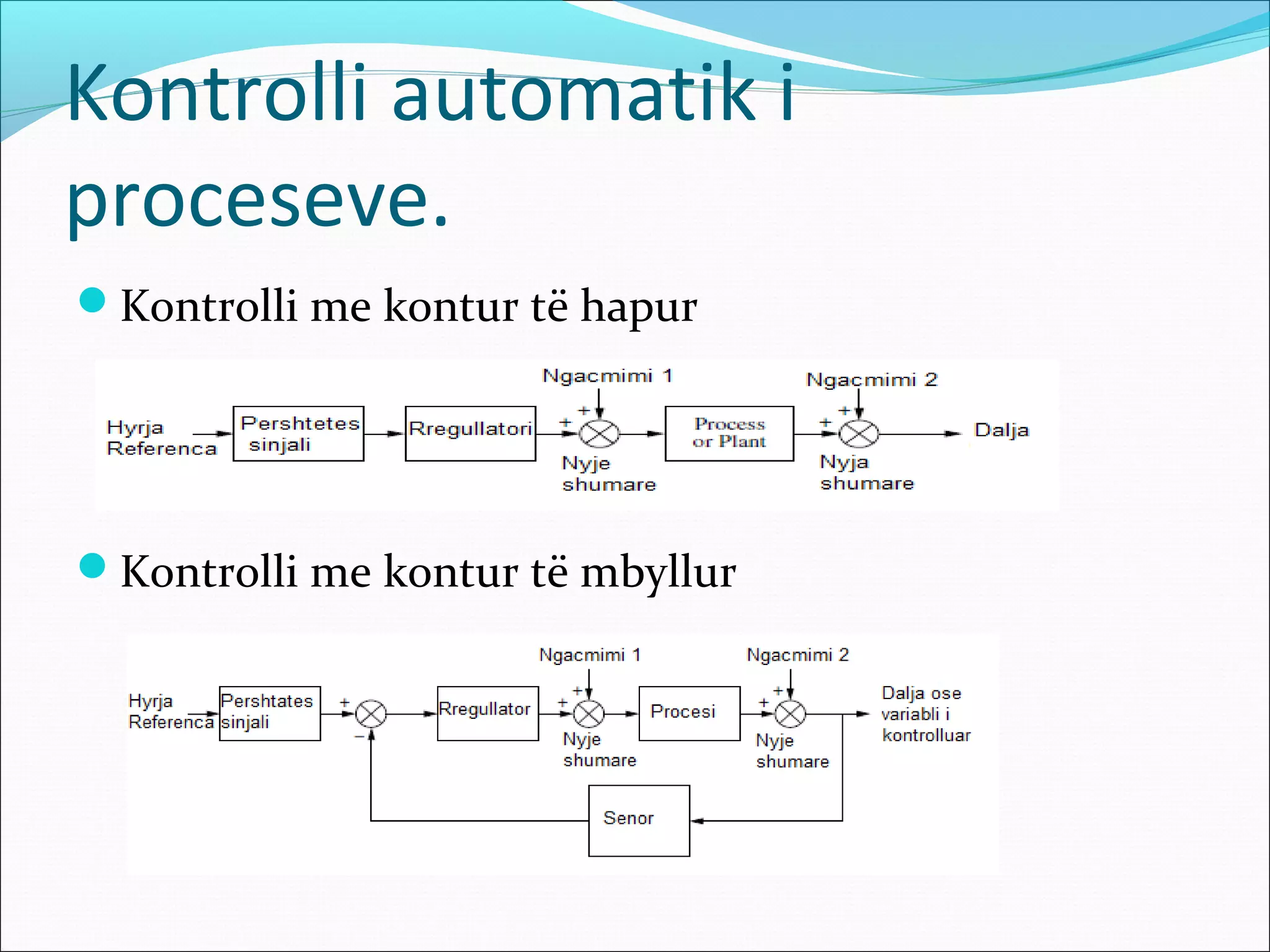
Kontrolli automatik i proceseve.
Pjesa eksperimentale:
Procesi industrial (mekanizëm).
Modeli matematik i mekanizmit.
Qarku ekuivalent elektrik i mekanizmit.
3.
Proceset industriale
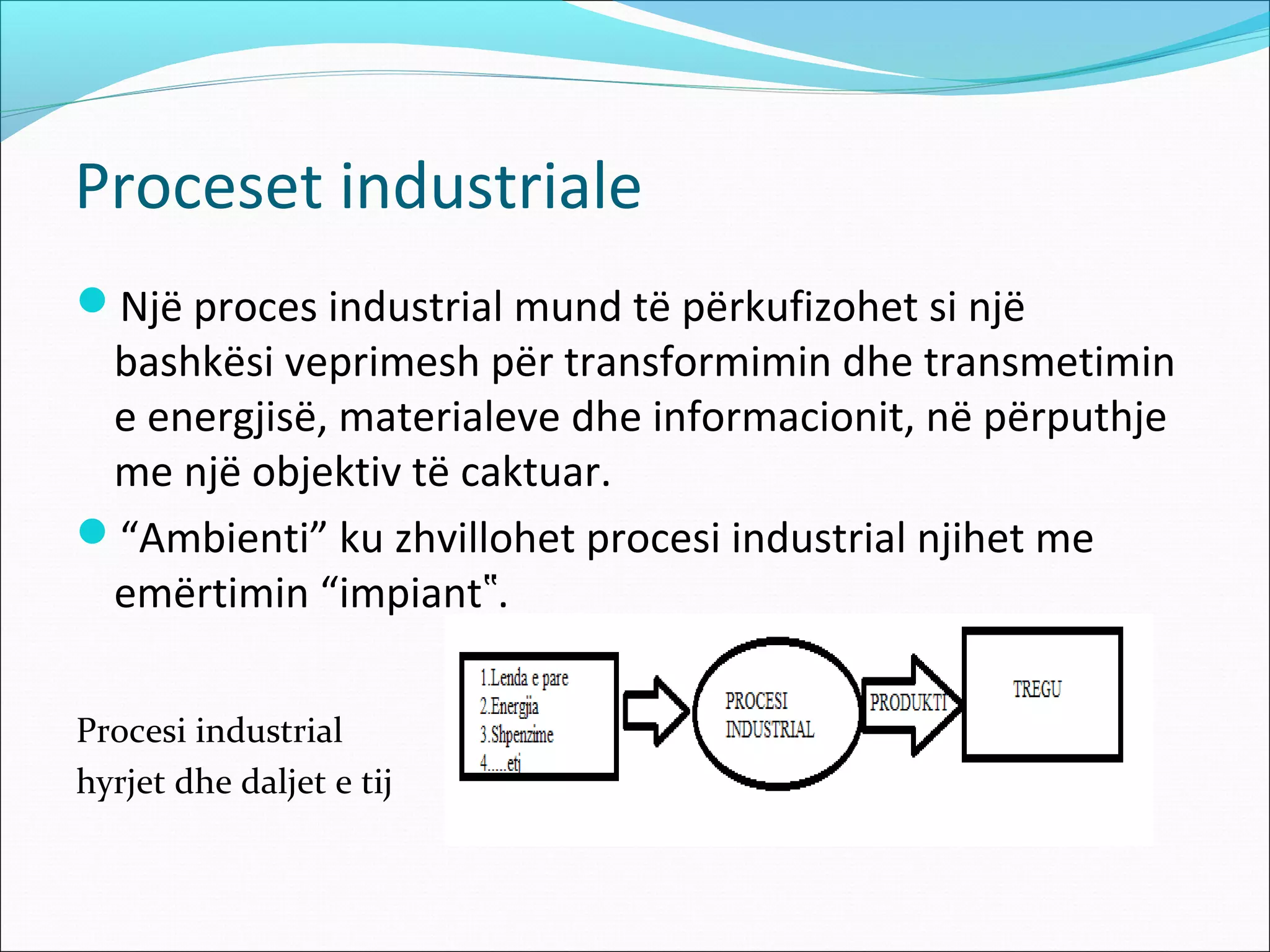
Një procesindustrial mund të përkufizohet si një
bashkësi veprimesh për transformimin dhe transmetimin
e energjisë, materialeve dhe informacionit, në përputhje
me një objektiv të caktuar.
“Ambienti” ku zhvillohet procesi industrial njihet me
emërtimin “impiant‟.
Procesi industrial
hyrjet dhe daljet e tij
4.
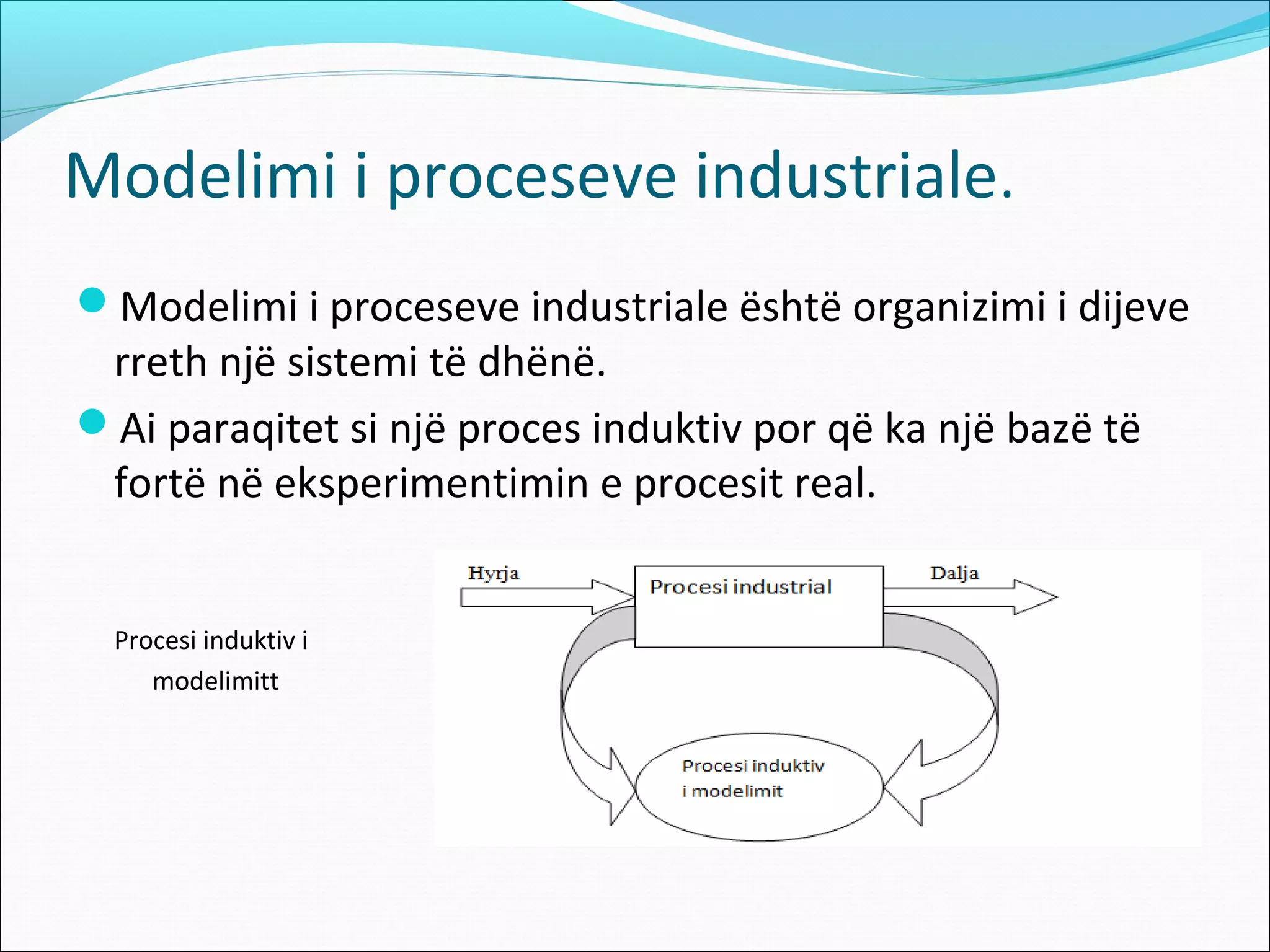
Modelimi i proceseveindustriale.
Modelimi i proceseve industriale është organizimi i dijeve
rreth një sistemi të dhënë.
Ai paraqitet si një proces induktiv por që ka një bazë të
fortë në eksperimentimin e procesit real.
Procesi induktiv i
modelimitt
5.
Modelet e proceseve.
Disanga modelet qe perdoren per te modeluar procesin
jane:
Modele fizike te procesit real te cilat paraqesin
procesin real te ndertuar ne baze te nje shkalle
ndryshimi.
Modelet mendore te cilat jane modeleintuitive dhe
ekzistojne vetem ne mendim.
Modelet matematike ,te cilat paraqesin marredheniet
midis variablave te ndryshem te procesit,ne baze te
nje strukture matematikore te pranuar.
6.
Modelet matematike teproceseve:
Janë të kuptueshme nga të gjithë dhe mund të
arsyetohet lehtë mbi sjelljen e procesit.
Ndihmon të kuptosh proceset reale.
Ndihmojnë në projektim.
Perfaqëson procesin real dhe duke i simuluar mund të
shmangim dëmtimet që mund të ketë sistemi real kur
ai vendoset ne punë.
Jane te tipeve te ndryshme :
(lineare apo jolineare,diskrete apo te vazhduar etj.).
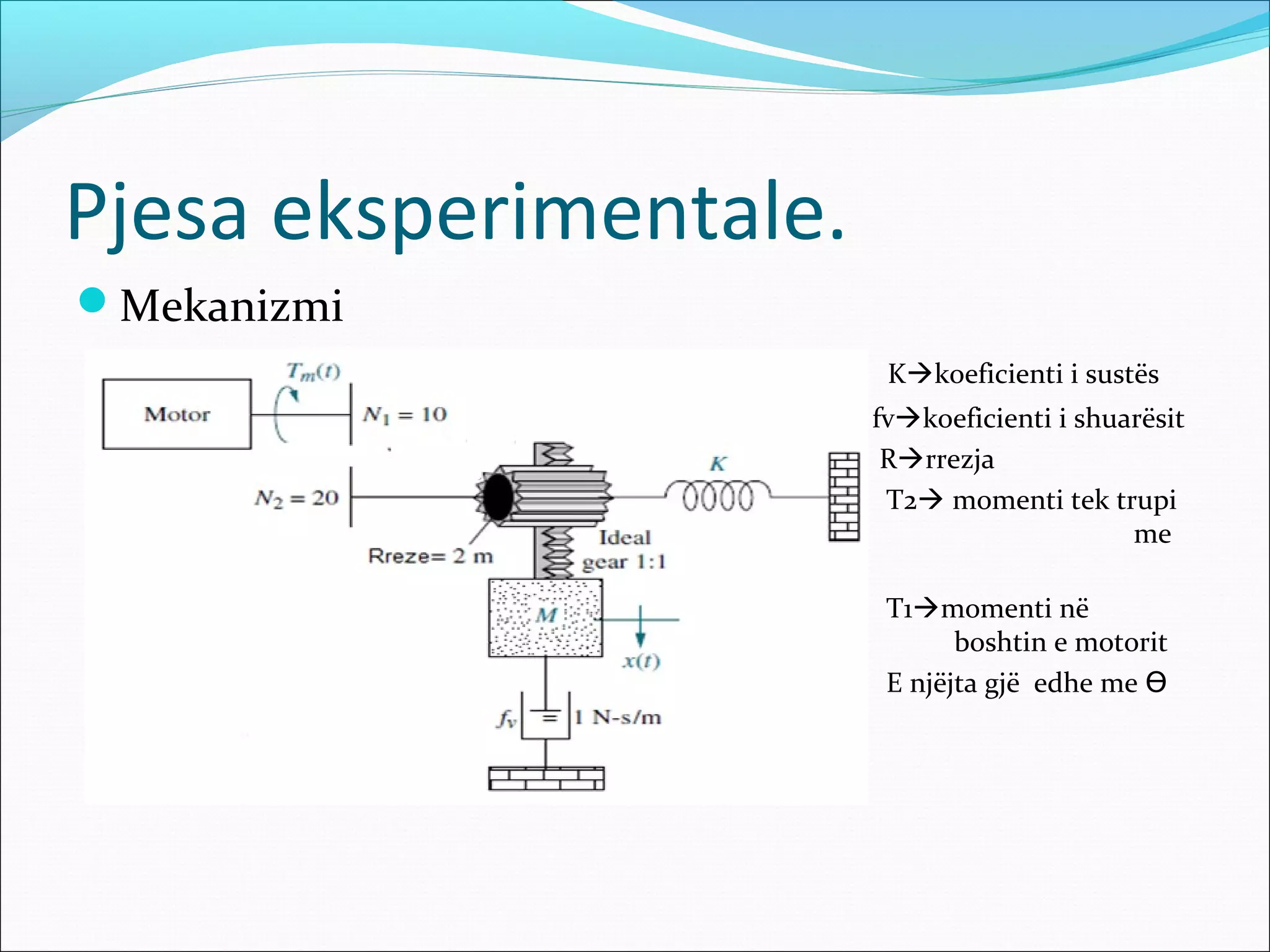
Pjesa eksperimentale.
Mekanizmi
Kkoeficienti i sustës
fvkoeficienti i shuarësit
Rrrezja
T2 momenti tek trupi
e me
rreze 2m
T1momenti në
b boshtin e motorit
E njëjta gjë edhe me ϴ
9.
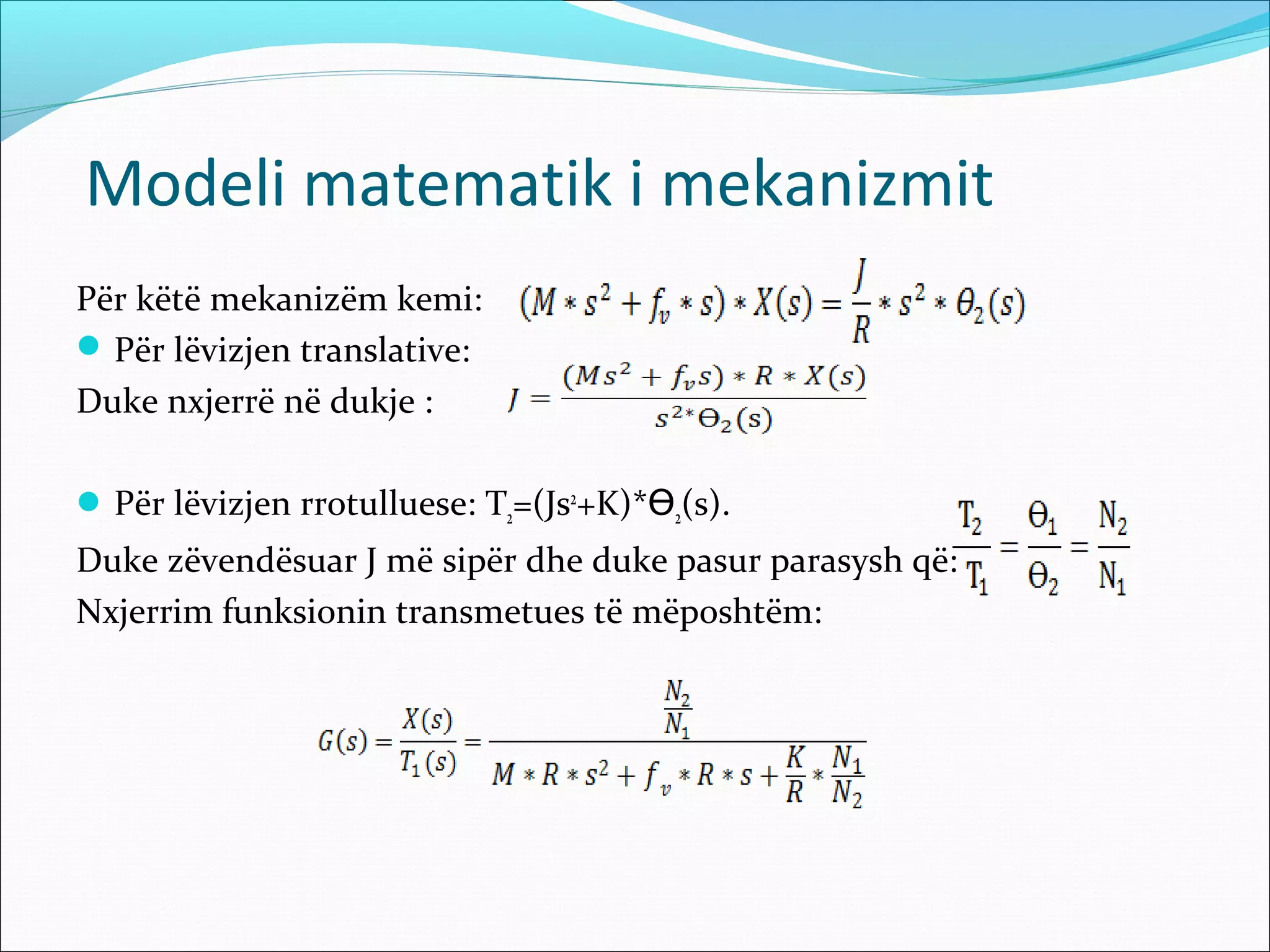
Modeli matematik imekanizmit
Për këtë mekanizëm kemi:
Për lëvizjen translative:
Duke nxjerrë në dukje :
Për lëvizjen rrotulluese: T2=(Js2+K)*ϴ2(s).
Duke zëvendësuar J më sipër dhe duke pasur parasysh që:
Nxjerrim funksionin transmetues të mëposhtëm:
10.
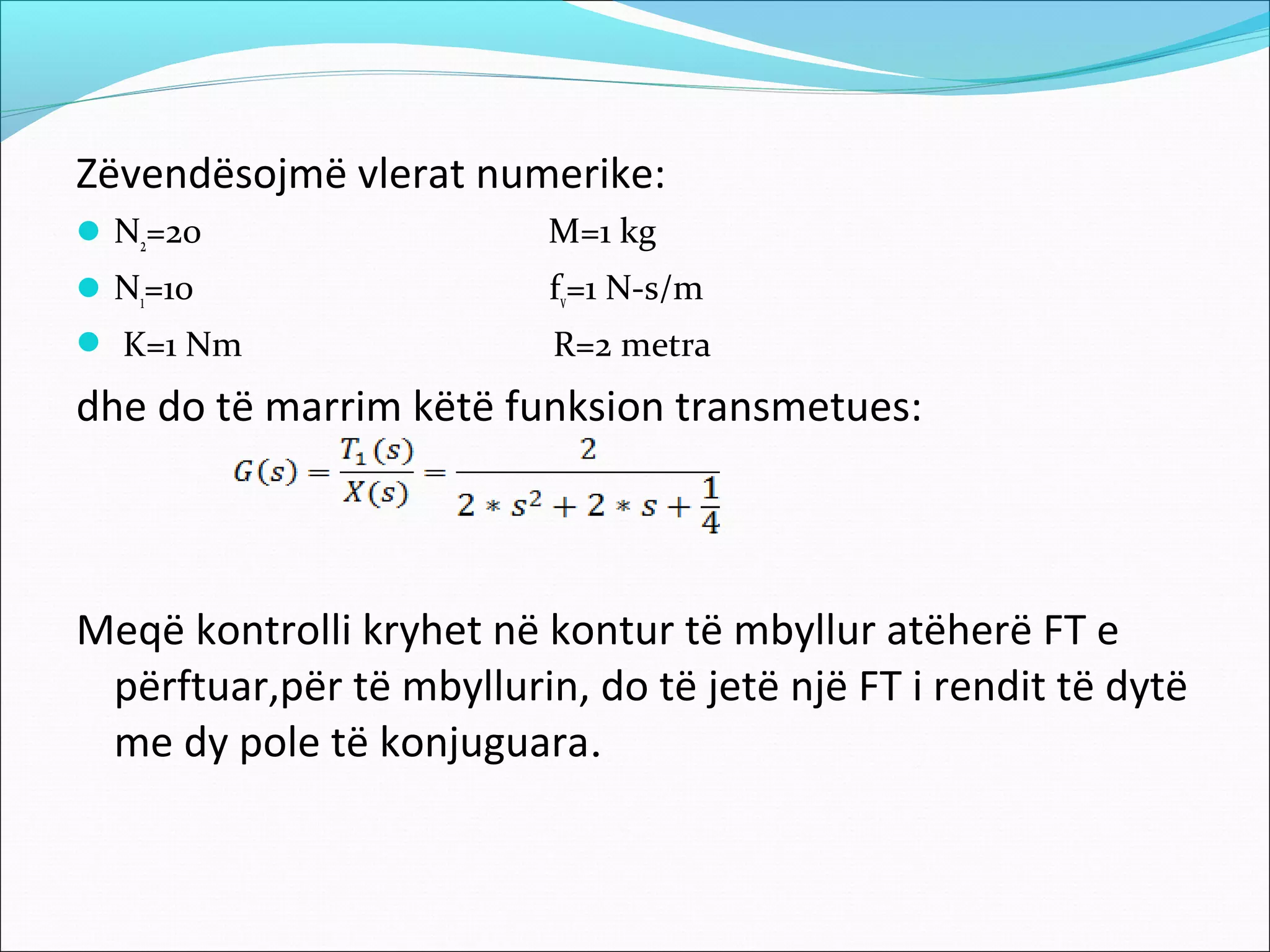
Zëvendësojmë vlerat numerike:
N2=20 M=1 kg
N1=10 fv=1 N-s/m
K=1 Nm R=2 metra
dhe do të marrim këtë funksion transmetues:
Meqë kontrolli kryhet në kontur të mbyllur atëherë FT e
përftuar,për të mbyllurin, do të jetë një FT i rendit të dytë
me dy pole të konjuguara.
11.
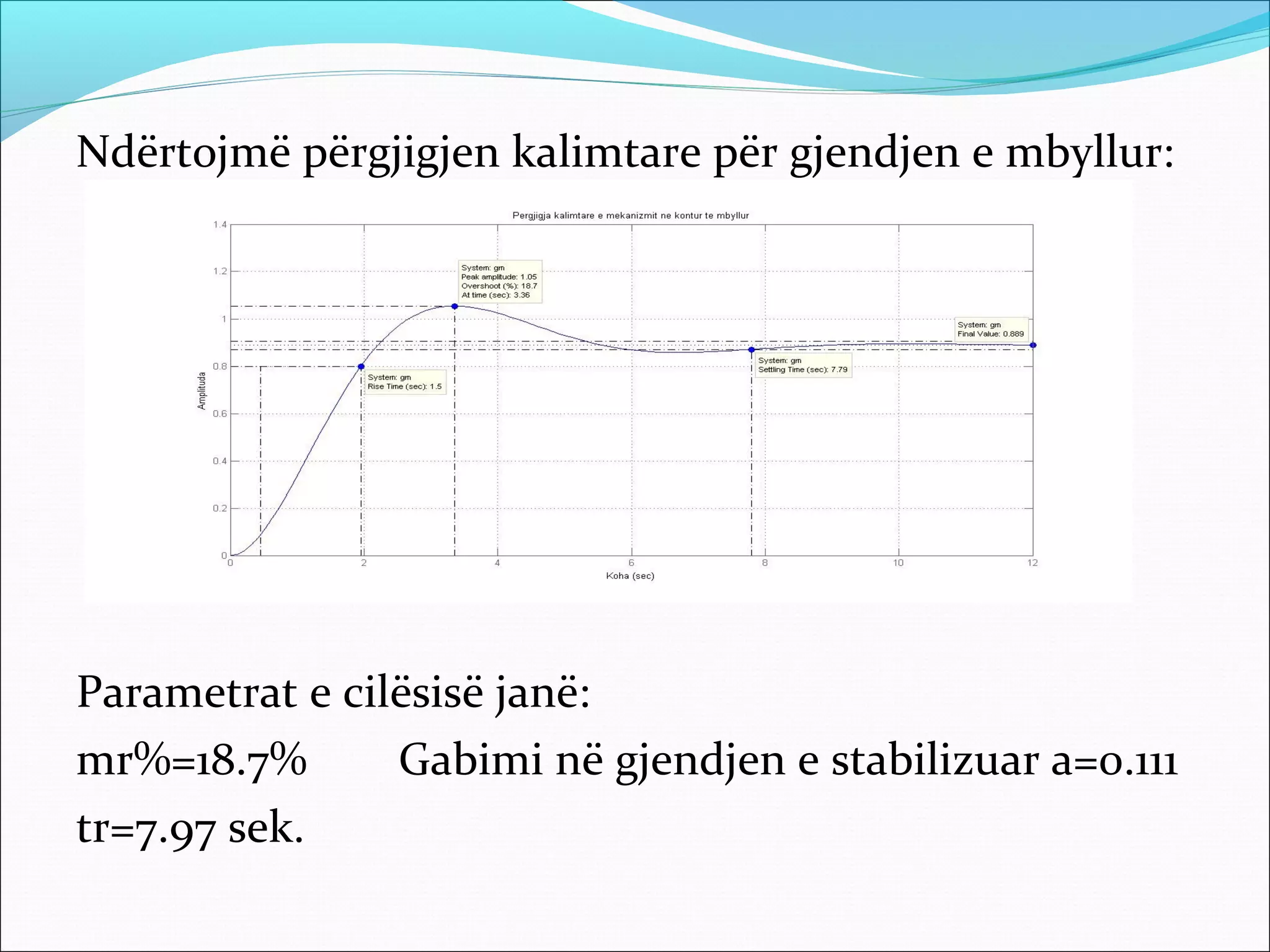
Ndërtojmë përgjigjen kalimtarepër gjendjen e mbyllur:
Parametrat e cilësisë janë:
mr%=18.7% Gabimi në gjendjen e stabilizuar a=0.111
tr=7.97 sek.
12.
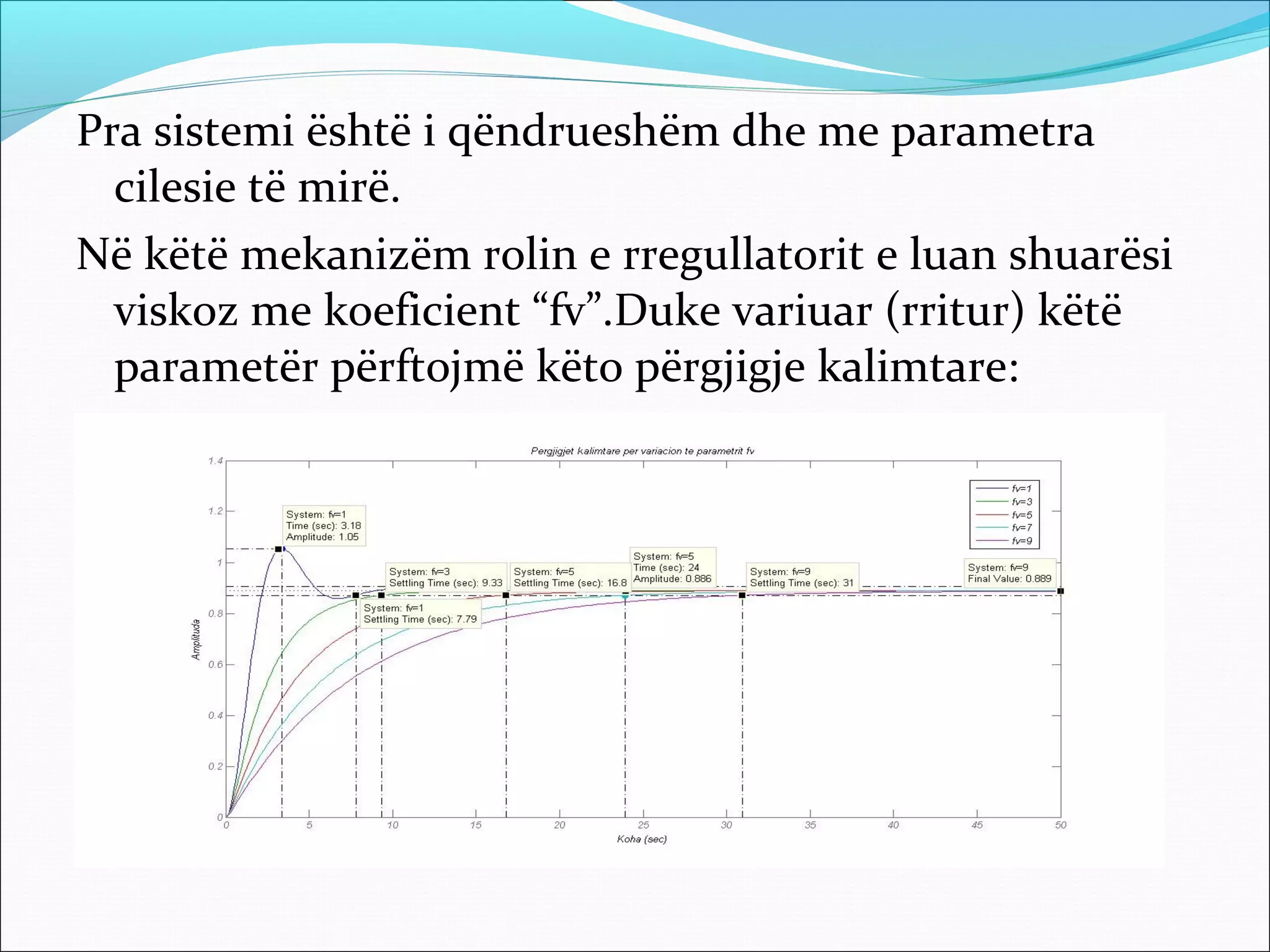
Pra sistemi ështëi qëndrueshëm dhe me parametra
cilesie të mirë.
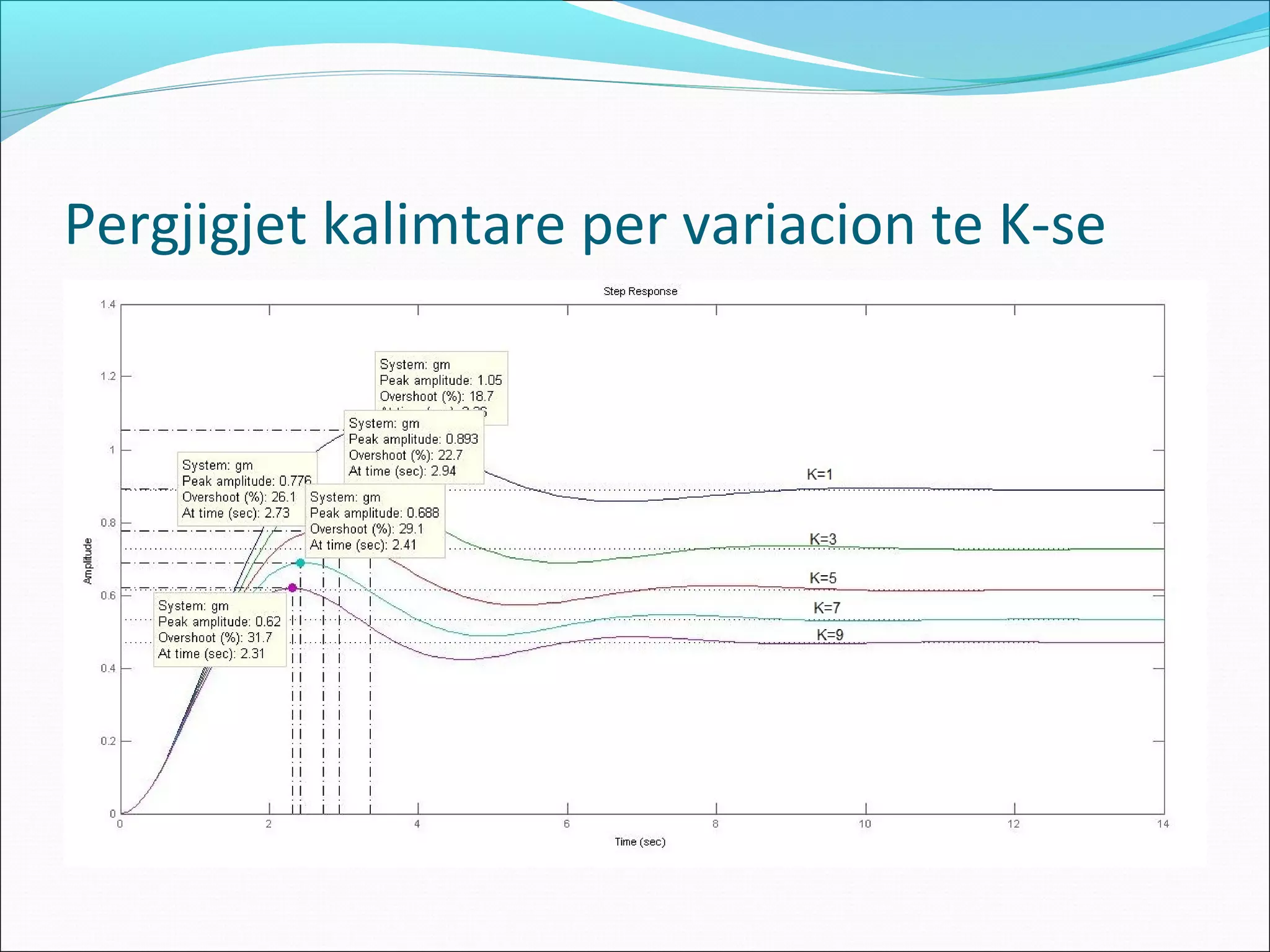
Në këtë mekanizëm rolin e rregullatorit e luan shuarësi
viskoz me koeficient “fv”.Duke variuar (rritur) këtë
parametër përftojmë këto përgjigje kalimtare:
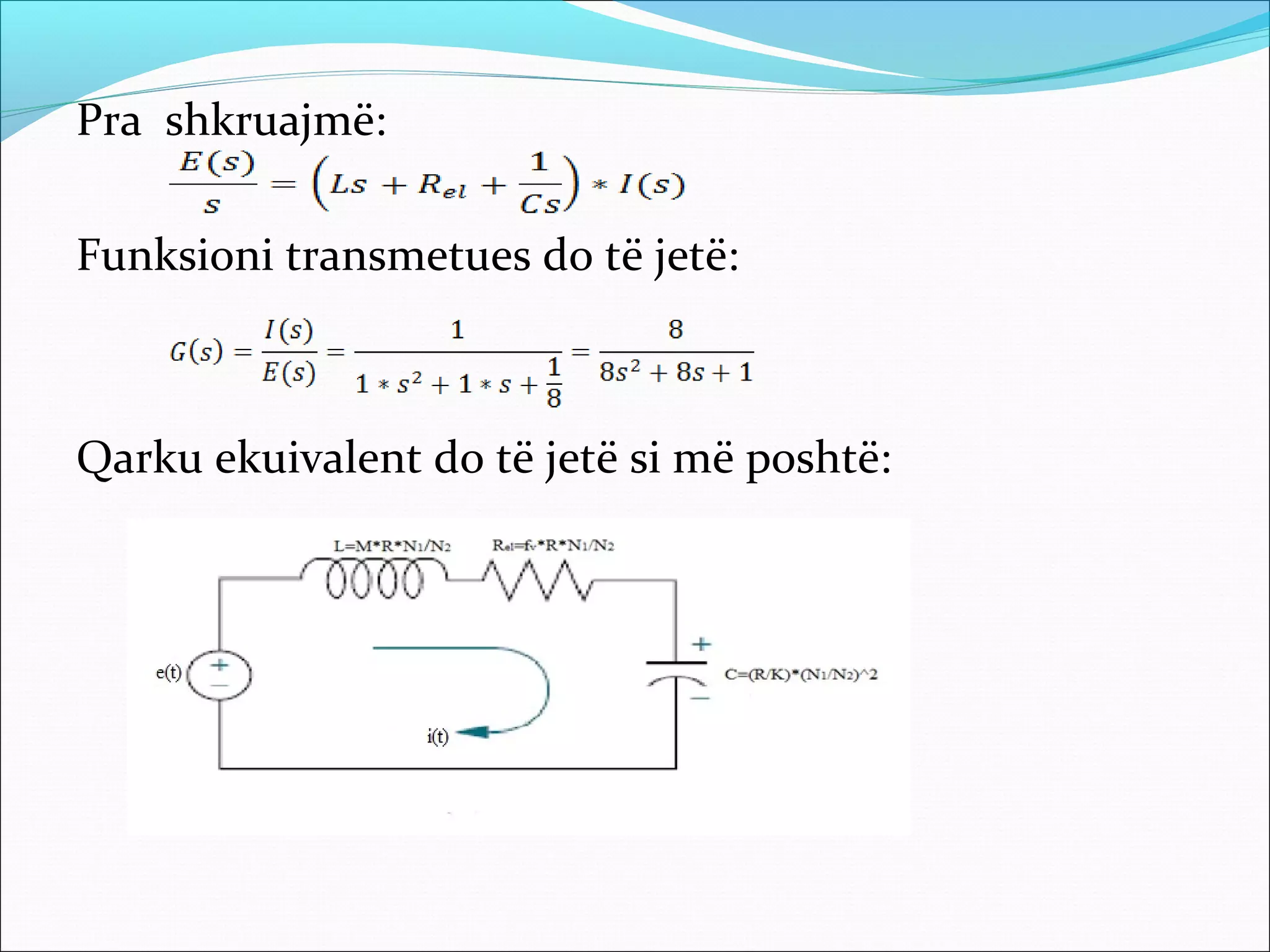
Ndertimi i qarkutelektrik ekuivalent
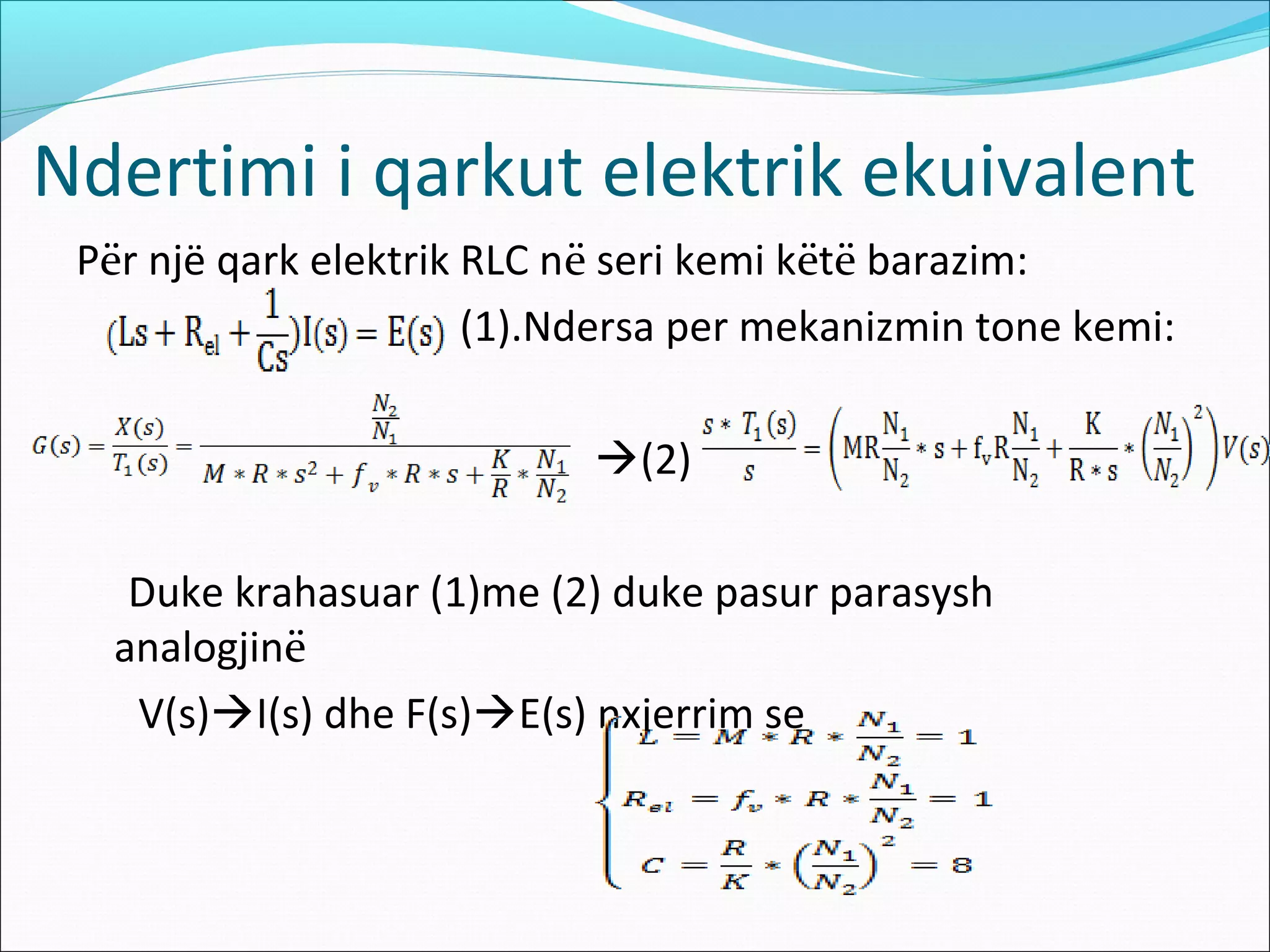
Për një qark elektrik RLC në seri kemi këtë barazim:
(1).Ndersa per mekanizmin tone kemi:
(2)
Duke krahasuar (1)me (2) duke pasur parasysh
analogjinë
V(s)I(s) dhe F(s)E(s) nxjerrim se
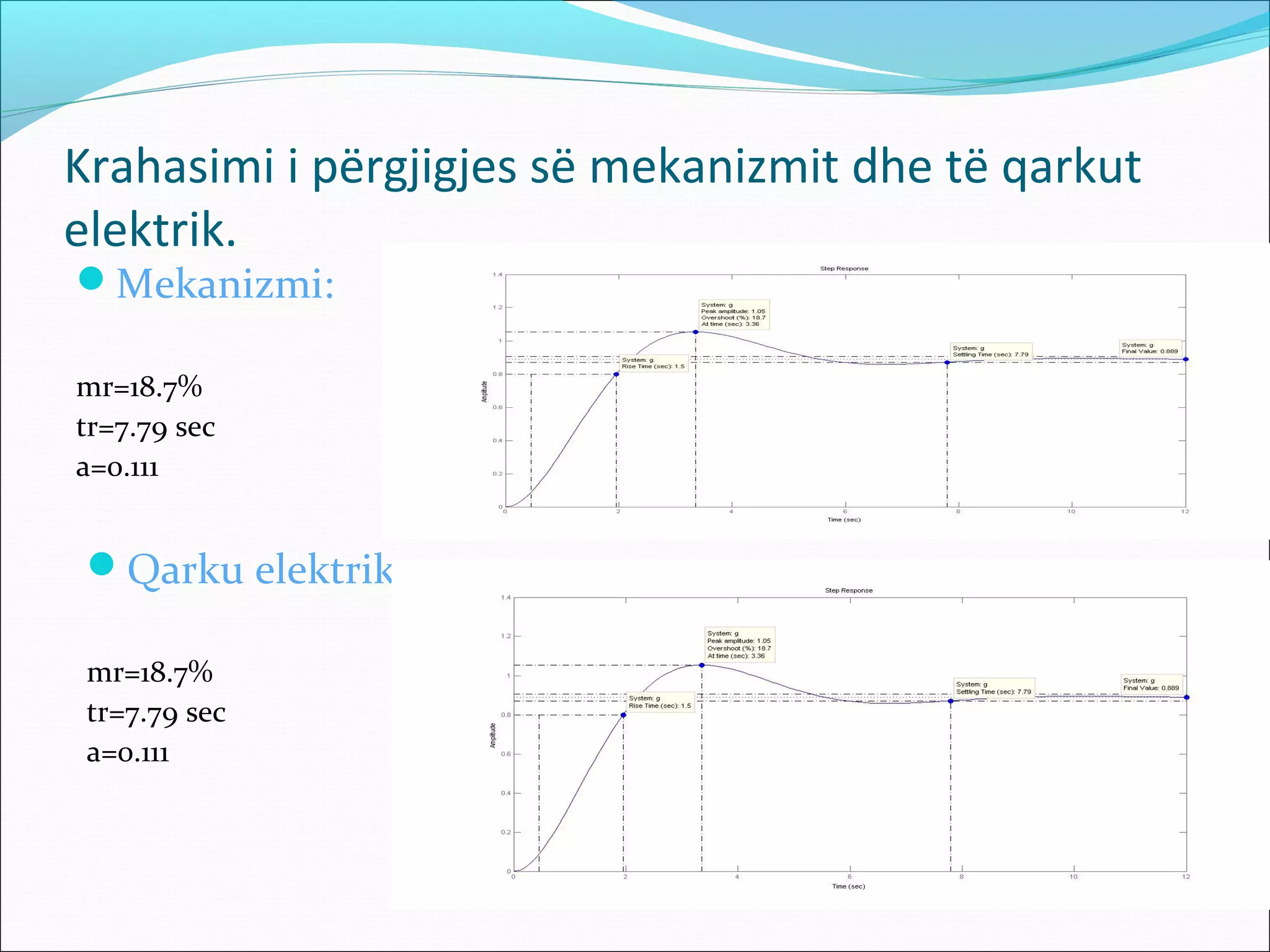
Krahasimi i përgjigjessë mekanizmit dhe të qarkut
elektrik.
Mekanizmi:
mr=18.7%
tr=7.79 sec
a=0.111
Qarku elektrik
mr=18.7%
tr=7.79 sec
a=0.111
17.
Konkluzione:
1. Modelimi injë procesi është një procedurë e cila kërkon
njohuri nga fusha të ndryshme.
2. Modelet matematike janë modelet më të përdorura pasi
në bazë të tyre mund të arsyetosh mbi sjelljen e procesit
3. Proceset mund të modelohen me anë të qarqeve
elektrike dhe sjellja e procesit mund të pasqyrohet më së
miri ne qarkun elektrik.
4. Pasi modelohen me qark elektrik atëherë mund të
eksperimentohet mbi të dhe të nxirren përfundime mbi
procesin real.













































![Permisimi i koeficientit te fuqise [compatibility mode]](https://cdn.slidesharecdn.com/ss_thumbnails/permisimiikoeficientittefuqisecompatibilitymode-170422105244-thumbnail.jpg?width=640&height=640&fit=bounds)



















