Përmbajtja
Përshkrimi injë trupi në hapesirë.
Pozicioni i një pike të trupit në hapësirë.
Orientimi i trupit në hapësirë.
Sistemet relative ndaj njëri-tjetrit.
Matrica rrotulluese.
Shembull i përdorimit në robotë.
Këndet Euler.
Këndet e fiksuara.
3.
Përshkrimi i njëtrupi në hapësirë.
Që të përshkruhet një trup në hapësirën 3-D, duhet të
jepet:
1. Pozicioni i nje pike të trupit,referuar një sistemi të
palëvizshëm
2. Orientimi i trupit referuar pikës se cilës i njohim
koordinatat referuar sistemit bazë.
4.
Vendndodhja e njepike ne hapesire.
Nje pike ne hapesire,referuar ne sistemi te
fiksuar,pershkruhet:
Me ane te koordinatave karteziane (x,y,z).
Me ane te koordinatave sferike (ρ=cte,φ,ѳ).
Me ane te koordinatave cilindrike (r,β,α,).
Ne do te merremi vetem me rastin e pare.
5.
Orientimi i trupitne hapesire.
Per te bere orientimin e trupit na hapesire,kundrejt nje
sistemi baze,nevojitet nje sistem tjeter,i fiksuar ne trup
dhe qe eshte relativ kundrejt sistemit te pare.
Keshtu studimi i levizjeve
te robotit kthehet ne nje
studim te sistemeve
koordinative kundrejt
njeri-tjetrit
6.
Sistemet relative ndajnjeri tjetrit.
Sistemet relative mund te levizin ne dy menyra kundrejt
sistemit baze:
1. Zhvendosje paralele e sistemit relativ.
Kjo levizje realizohet tek robotet nga ciftues
prizmatike te nyjeve perberese te robotit
1. Rrotullim i sistemit relativ kundrejt atij baze.
Kjo levizje tek robotet realizohet ne saje te ciftuesve
sferike te cilat kane nje perdorim te madh tek robotet
me artikulacione te shumta.
7.
Matematikisht kalimi ngasistemi ne levizje ne sistemin
baze realizohet nga matrica rrotullues.
Kjo matrice ka disa karakteristika:
1. Ben kalimin nga nje sistem cfardo ne nje sistem baze
dhe anasjelltas.
2. Shenohet me ku Asistemi baze i referimit dhe
Bsistemi relativ kundrejt A-se.
3. Eshte i vertete barazimi
8.
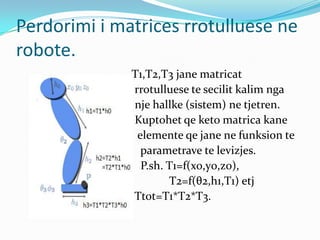
Perdorimi i matricesrrotulluese ne
robote.
T1,T2,T3 jane matricat
rrotulluese te secilit kalim nga
nje hallke (sistem) ne tjetren.
Kuptohet qe keto matrica kane
elemente qe jane ne funksion te
parametrave te levizjes.
P.sh. T1=f(x0,y0,z0),
T2=f(θ2,h1,T1) etj
Ttot=T1*T2*T3.
9.
Kendet Euler
Per tepershkruar orientimin e sistemit relativ,
rrotullojme sistemin relativ fillimisht sipas aksi ox me
nje kend α,pastaj sipas oy me kend β dhe ne fund
sipas oz me kend γ,derisa te perputhim boshtet e
sistemit relativ me boshtet e sistemit te njohur cfaredo.
Kendet e mesiperme quhen kendet e Eulerit.
Keto kende jane te rendesishme pasi bejne te mundur
barasvlersimin e dy sistemeve duke pasur si variabel
vetem tri kende. Matrica e rrotullimit qe formohet
eshte me tri te panjohura (kendet e Eulerit).
10.
Kendet e fiksuara
Perte pershkruar orientimin e sistemit relativ,
rrotullojme sistemin relativ fillimisht sipas aksi ox me
nje kend α,pastaj sipas oy me kend β dhe ne fund
sipas oz me kend γ,derisa te perputhim boshtet e
sistemit relativ me boshtet e sistemit baze.
Thame qe keto kende sherbejne per te paraqitur dhe per
te thjeshtuar matricen rrotulluese (transformuese).