Hyrje
Deri tani jemifokusuar në kinematikën e manipulatorit
e cila ishte një fushe e ndarë në dy pjesë:
Kinematika direkte që përbën procesin e analizës të
kontrollit automatik te manipulatorit.
Kinematika inverse e cila përbën procesin e sintezës të
kontrollit automatik.
Më poshtë do të trajtojmë dinamikën e manipulatorit si
një ndër elementet më të rëndësishëm në projektimin e
lëvizjes së manipulatorit.
4.
Dinamika
Dinamika :Studionlidhjen midis forcës/momentit me
lëvizjen e manipulatorit,zhvendosje lineare/këndore.
Matematikisht kjo marrëdhënie shprehet me anë të
një sistemi ekuacionesh diferenciale .
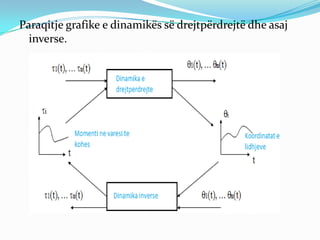
Do të dallojmë dy probleme të dinamikës:
Jepen pikat e trajektoreve dhe të gjendet
forca/momenti në lidhjet e manipulatorit(dinamika e
drejtpërdrejt)e cila përbën procesit e analizës së
dinamikës së manipulatorit.
5.
Problemi i dytë është problemi i anasjelltë,pra jepet
vektori i forcave/momenteve dhe të gjendet se si do
të lëvizë manipulatori nën veprimin e këtyre
forcave/momenteve ( ndryshe dinamika inverse).
Ky stad arsyetimi përbën fazën e sintezës së
dinamikës së një manipulatori.
Përdoret për të bërë simulimin dhe me pas
konstruktimin e manipulatori.
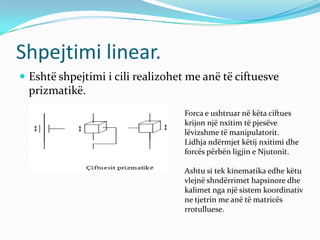
Shpejtimi linear.
Eshtëshpejtimi i cili realizohet me anë të ciftuesve
prizmatikë.
Forca e ushtruar në këta ciftues
krijon një nxitim të pjesëve
lëvizshme të manipulatorit.
Lidhja ndërmjet këtij nxitimi dhe
forcës përbën ligjin e Njutonit.
Ashtu si tek kinematika edhe këtu
vlejnë shndërrimet hapsinore dhe
kalimet nga një sistem koordinativ
ne tjetrin me anë të matricës
rrotulluese.
8.
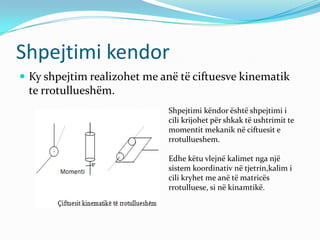
Shpejtimi kendor
Kyshpejtim realizohet me anë të ciftuesve kinematik
te rrotullueshëm.
Shpejtimi këndor është shpejtimi i
cili krijohet për shkak të ushtrimit te
momentit mekanik në ciftuesit e
rrotullueshem.
Edhe këtu vlejnë kalimet nga një
sistem koordinativ në tjetrin,kalim i
cili kryhet me anë të matricës
rrotulluese, si në kinamtikë.