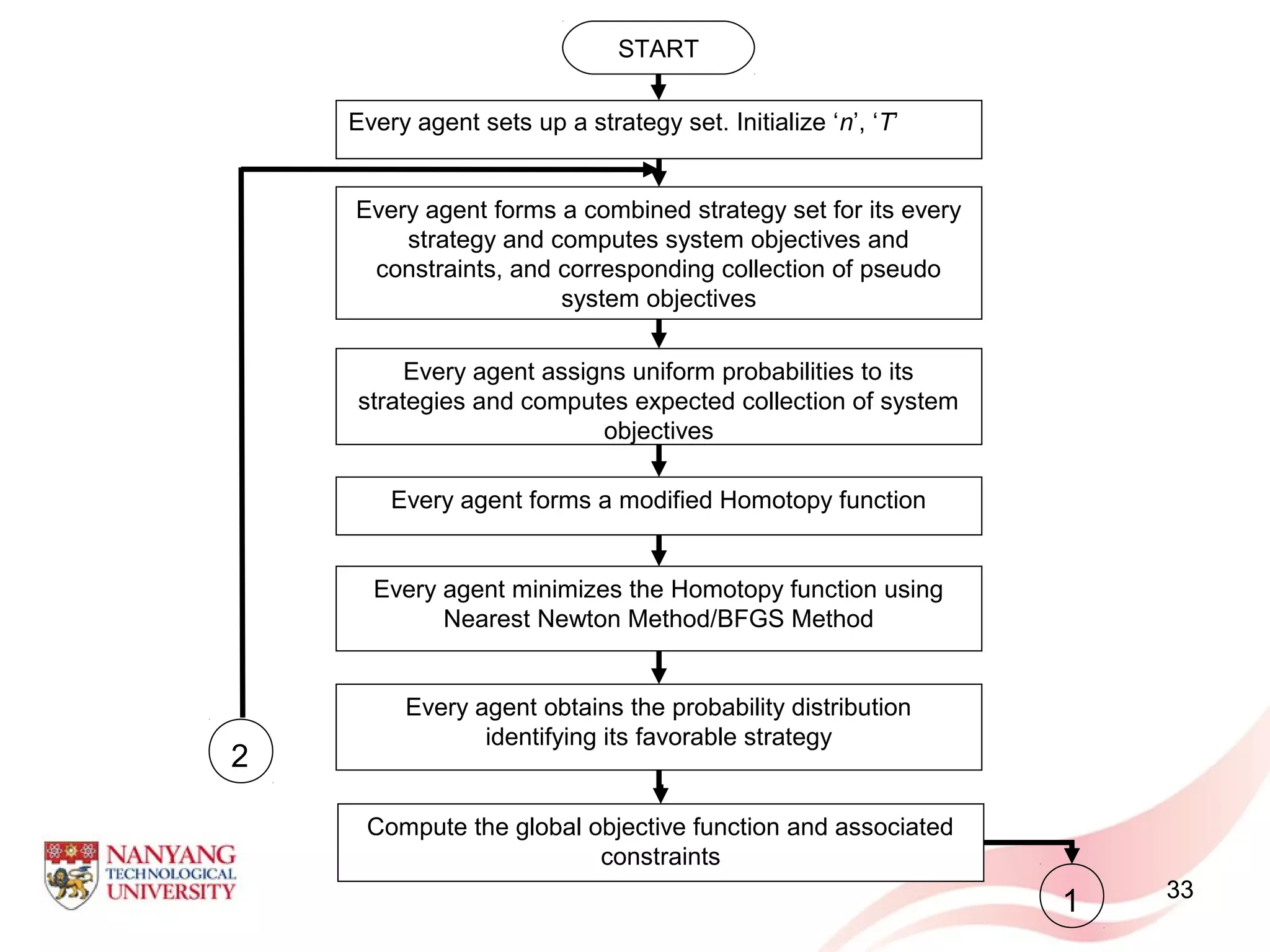
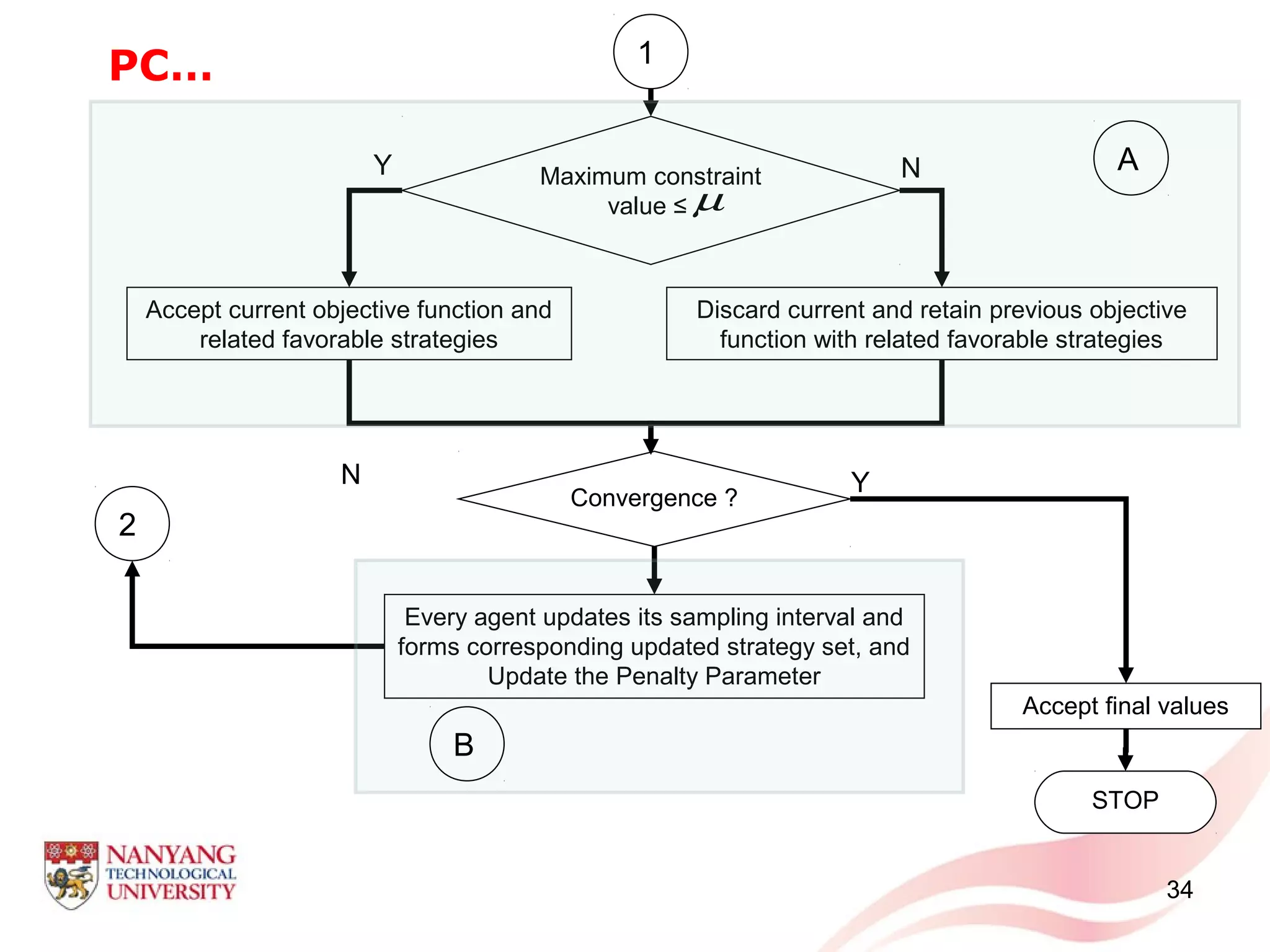
The document presents an overview of probability collectives (PC), a distributed optimization approach for solving complex multi-agent systems. PC formulates the problem as agents (variables) that iteratively sample strategies and update their probability distributions to minimize a global objective function in a cooperative manner. The key characteristics of PC include exploiting concepts from game theory, statistical physics, and optimization. PC can handle continuous, discrete, and mixed variable problems in a scalable way and is robust to agent failures. Constraint handling techniques are developed to apply PC to constrained optimization problems.

![Formulation of Unconstrained PC
• Consider a general unconstrained problem (in minimization sense)
comprising variables
• Variables Agents/Players of a game being played iteratively.
• Initially, every agents is given a sampling interval/space
• Every agent randomly samples strategies from within the
corresponding sampling interval .
12
( ) ( )1 2 1
, ,..., ,..., ,i N N
G f X X X X X−
=X
,lower upper
i i i
Ψ ∈ Ψ Ψ
N
[ ][1] [2] [ ]
{ , ,..., ,..., } , 1,2,...,imr
i i i i iX X X X i N and= =X
1 2 1... ...i N Nm m m m m−= = = = = =
i im
iΨ](https://image.slidesharecdn.com/thesispresentationjan-12-2012-151104082441-lva1-app6891/75/Probability-Collectives-12-2048.jpg)
![13
Formulation of Unconstrained PC
{ }[1] [?] [?] [1] [?] [?]
1 2 1, ,..., ,..., ,i i N NX X X X X−=Y
Agent selects its first strategy and samples randomly from other
agents’ strategies as well.
( )[1]
iG Y
1 [ ] [ ][ ][1] [2] [1] [2] [1] [2]
1 1 1 1{ , ,..., } ,..., { , ,..., } ,..., { , ,..., }i Nm mm
i i i i N N N NX X X X X X X X X= = =X X X
{ } ( )
{ } ( )
{ } ( )
{ } ( )
[2] [?] [?] [2] [?] [2]
1 2
[3] [?] [?] [3] [?] [3]
1 2
[ ] [?] [?] [ ] [?] [ ]
1 2
[ ] [ ] [ ][?] [?] [?]
1 2
, ,..., ,...,
, ,..., ,...,
, ,..., ,...,
, ,..., ,...,i i i
i i N i
i i N i
r r r
i i N i
m m m
i i N i
X X X X G
X X X X G
X X X X G
X X X X G
= ⇒
= ⇒
= ⇒
= ⇒
Y Y
Y Y
Y Y
Y Y
M
M
( )[ ]
1
im
r
i
r
G
=
⇒ ∑ Y
i](https://image.slidesharecdn.com/thesispresentationjan-12-2012-151104082441-lva1-app6891/75/Probability-Collectives-13-2048.jpg)
![Formulation of Unconstrained PC
14
• The ultimate goal of every agent is to identify its strategy value
which contributes the most towards the minimization of the sum
(collection) of these system objectives i.e. .
• Possibly many local minima
• Directly minimizing may require excessive computational efforts
• Homotopy Method: modify the function by converting it into
another topological space by constructing a related and easier
function . This forms the Homotopy function:
( )[ ]
1
im
r
i
r
G
=
∑ Y
i
( )( ) ( ) [ )[ ]
1
, ( ) , 0,
im
r
i i i i
r
J q T G T f T
=
= − ∈ ∞∑X Y X
( )if X](https://image.slidesharecdn.com/thesispresentationjan-12-2012-151104082441-lva1-app6891/75/Probability-Collectives-14-2048.jpg)
![Formulation of Unconstrained PC
• Analogy to Helmholtz free energy
One of the ways to achieve the thermal equilibrium and hence minimize
the energy to do work is actually minimizing the internal energy
through an annealing schedule, i.e. stepwise drop the temperature of
the system from to achieving the equilibrium
in every step.
15
( )( ) ( ) [ )[ ]
1
, ( ) , 0,
im
r
i i i i
r
J q T G T f T
=
= − ∈ ∞∑X Y X
L D T S= −
Energy available to do work Internal energy Spontaneous (Random) energy
initialT T= 0 finalT or T T→ →](https://image.slidesharecdn.com/thesispresentationjan-12-2012-151104082441-lva1-app6891/75/Probability-Collectives-15-2048.jpg)
![Formulation of Unconstrained PC
Deterministic Annealing
• It suggests conversion of the variables into random real valued
probabilities which converts the into .
16
( )( ) ( ) [ )[ ] [ ] [ ]
2
1 1
, ( ) ( )log ( ) , 0,
i im m
r r r
i i i i i
r r
J q T E G T q X q X T
= =
= − − ∈ ∞ ÷
∑ ∑X Y
[ ]
1
( )
im
r
i
r
G
=
∑ Y ( )[ ]
1
( )
im
r
i
r
E G
=
∑ Y
( )( ) ( ) [ )[ ]
1
, ( ) , 0,
im
r
i i i i
r
J q T G T f T
=
= − ∈ ∞∑X Y X
( )( ) ( ) [ )[ ]
1
, ( ) , 0,
im
r
i i i i
r
J q T E G T S T
=
= − ∈ ∞∑X Y](https://image.slidesharecdn.com/thesispresentationjan-12-2012-151104082441-lva1-app6891/75/Probability-Collectives-16-2048.jpg)
![Formulation of Unconstrained PC
17
0
0.05
0.1
0.15
1 2 3 4 5 6 7 8 9 10
0
0.05
0.1
0.15
1 2 3 4 5 6 7 8 9 10
[ ]
( ) [ ]
( )1
1 1 1... 1/im
q X q X m= = = [ ]
( ) [ ]
( )1
... 1/im
N N Nq X q X m= = =
L
0
0.05
0.1
0.15
1 2 3 4 5 6 7 8 9 10
L
[ ]
( ) [ ]
( )1
... 1/im
i i iq X q X m= = =
Agent 1 Agent i Agent N
{ }
{ }
{ }
[1] [?] [1] [?]
1
[ ] [?] [ ] [?]
1
[ ] [ ][?] [?]
1
,..., ,...,
,..., ,...,
,..., ,...,i i
i i N
r r
i i N
m m
i i N
X X X
X X X
X X X
=
=
=
Y
Y
Y
M
M
( )( )[ ]
1
im
r
i
r
E G
=
∑ Y
( ) ( ) ( ){ } [ ]
( ) [ ]
( ) ( )
[ ]
( )( )
( )( )
( ) ( ) ( ){ } [ ]
( ) [ ]
( ) ( )
[ ]
( )( )
( )( )
( ) ( ) ( ){ } [ ]
( ) [ ]
( ) ( )
[ ]
( )( )
( )( )
1 1 ?[?] [1] [?] [1]
1
?[?] [ ] [?] [ ]
1
?[ ] [ ][?] [?]
1
,..., ,..., Y
,..., ,..., Y
,..., ,..., Y i ii i
i N i i ii
i
r rr r
i N i i ii
i
m mm m
i N i i ii
i
q X q X q X G q X q X E G
q X q X q X G q X q X E G
q X q X q X G q X q X E G
⇒ =
⇒ =
⇒ =
∏
∏
∏
Y
Y
Y
M
M
Strategies Strategies Strategies](https://image.slidesharecdn.com/thesispresentationjan-12-2012-151104082441-lva1-app6891/75/Probability-Collectives-17-2048.jpg)
![Formulation of Unconstrained PC
• The minimization of the Homotopy function can be carried out using
a suitable second order optimization approach such Nearest
Newton Descent Scheme as well as Broyden-Fletcher-Goldfarb-
Shanno (BFGS) scheme.
18
0
0.05
0.1
0.15
1 2 3 4 5 6 7 8 9 10
0
0.05
0.1
0.15
1 2 3 4 5 6 7 8 9 10
0
0.05
0.1
0.15
1 2 3 4 5 6 7 8 9 10
0
0.2
0.4
0.6
0.8
1
1 2 3 4 5 6 7 8 9 10
0
0.2
0.4
0.6
0.8
1
1 2 3 4 5 6 7 8 9 10
0
0.2
0.4
0.6
0.8
1 2 3 4 5 6 7 8 9 10
[ ] [ ] [ ] [ ] [ ] [ ]
{ } [ ]
( )1 2 1, ,..., ,..., ,fav fav fav fav fav fav fav
i N NX X X X X G−= ⇒Y Y
Favorable Strategy Favorable Strategy Favorable Strategy
Agent 1 Agent i Agent N](https://image.slidesharecdn.com/thesispresentationjan-12-2012-151104082441-lva1-app6891/75/Probability-Collectives-18-2048.jpg)
![Formulation of Unconstrained PC
• Updating of the Sampling Interval (Neighboring Method)
• Convergence and Final Solution
If
If there is no significant change in the system objectives for
successive considerable number of iterations
19
[ ]
( ) [ ]
( ), , 0 1
fav favupper lower upper lower
i i down i i i down i i downX Xλ λ λ Ψ ∈ − Ψ − Ψ + Ψ − Ψ < ≤
[ ] [ ] [ ] [ ] [ ]
{ } [ ], , , , , ,
1 2 1, ,..., , ( )
fav final fav final fav final fav final fav final fav final
N NX X X X G−= ⇒Y Y
0finalT T or T= →
[ ] [ ], , 1
( ) ( )
fav n fav n
G G ε−
− ≤Y Y](https://image.slidesharecdn.com/thesispresentationjan-12-2012-151104082441-lva1-app6891/75/Probability-Collectives-19-2048.jpg)
![20
Nash Equilibrium (Necessary Properties):
Rationality: Select the best possible strategy by guessing other agents’
strategies
Convergence: Same class policy of selecting the best possible strategy and
guessing other agents’ strategies (guaranteed: policy does not change)
Nash Equilibrium in PC
: by guessing other agents’ strategies
and : is communicated to every other agent
Formulation of Unconstrained PC
[ ]fav
iX
[ ]fav
iX [ ]
( )
fav
G Y](https://image.slidesharecdn.com/thesispresentationjan-12-2012-151104082441-lva1-app6891/75/Probability-Collectives-20-2048.jpg)
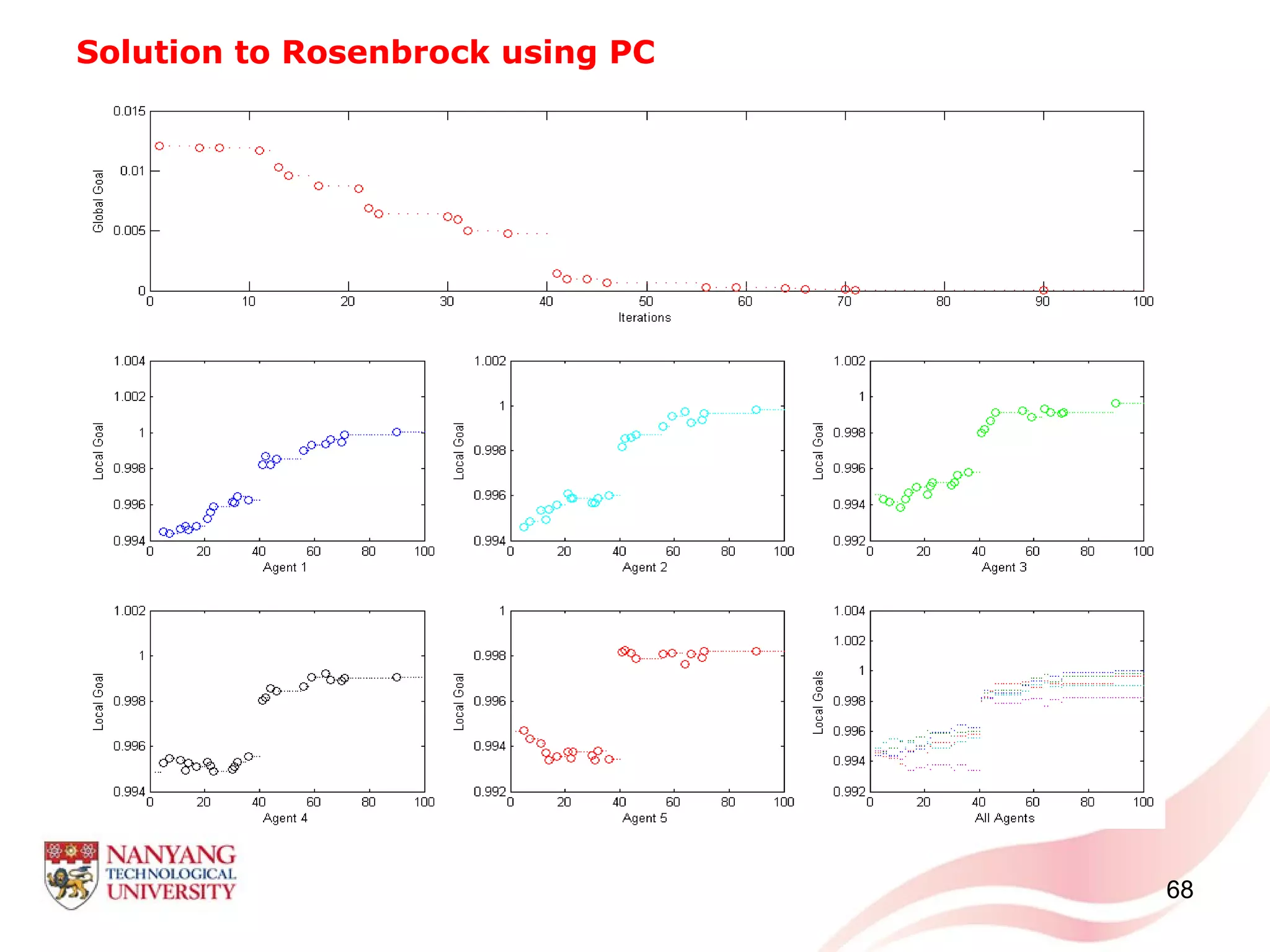
![21
Solution to Rosenbrock Function using PC
( ) ( ) ( )
1 2 22
1
1
100 1
N
i i i
i
f x x x
−
+
=
= − + −
∑X
where [ ]1 2 3....... Nx x x x=X
lower limit upper limit
1,2,...,
ix
i N
≤ ≤
=
Agents/
(Variables)
Strategy Values Selected with maximum Probability
Trial-1 Trial-2 Trial-3 Trial-4 Trial-5 Range of Values
Agent-1 1.0000 0.9999 1.0002 1.0001 0.9997 -1.0 to 1.0
Agent-2 1.0000 0.9998 1.0001 1.0001 0.9994 -5.0 to 5.0
Agent-3 1.0001 0.9998 1.0000 0.9999 0.9986 -3.0 to 3.0
Agent-4 0.9998 0.9998 0.9998 0.9995 0.9967 -3.0 to 8.0
Agent-5 0.9998 0.9999 0.9998 0.9992 0.9937 1.0 to 10.0
Fun. Value 2 x 10-5
1 x 10-5
2 x 10-5
2 x 10-5
5 x 10-5
Fun. Evals. 288100 223600 359050 204750 242950
Results](https://image.slidesharecdn.com/thesispresentationjan-12-2012-151104082441-lva1-app6891/75/Probability-Collectives-21-2048.jpg)
![Constrained PC (Approach 2): Penalty Function Approach
32
• Penalty based methods are the most generalized constraint handling
methods: simplicity, ability to handle non linear constraints and
compatibility with most of the unconstrained optimization methods
• Converts constrained optimization problem into unconstrained one.
[ ]
( ) ( ) ( ) ( )
2 2
[ ] [ ] [ ]
1 1
s t
r r r r
i i j i j i
j j
G g hφ θ +
= =
= + +
∑ ∑Y Y Y Y
( ) ( )( )[ ] [ ]
max 0,r r
j i j iwhere g g and is scalar parameterθ+
=Y Y](https://image.slidesharecdn.com/thesispresentationjan-12-2012-151104082441-lva1-app6891/75/Probability-Collectives-32-2048.jpg)
![Constrained PC (Approach 3): Feasibility-based Rule I
• Updating of the Sampling Space and Perturbation Approach
In order to jump out of this possible local minimum, every agent
perturbs its current feasible strategy
The value of and +/- sign are selected based on preliminary trials.
Every agent expands the sampling space as follows:
43
i
[ ] [ ] [ ]
( )
( ) [ ]
( ) [ ]
1 1
2 2
1
,
1
,
fav fav fav
i i i i
lower upper
fav
i
i
lower upper
fav
i
X X X fact
randomvalue if
X
where fact
randomvalue if
X
σ σ γ
σ σ γ
= ± ×
∈ ≤
=
∈ >
1 1 2 20 1lower upper lower upper
σ σ σ σ< < ≤ < <
γ
( ) ( ), , 0 1lower upper lower upper upper lower
i i up i i i up i i upλ λ λ Ψ ∈ Ψ − Ψ − Ψ Ψ + Ψ − Ψ < ≤
](https://image.slidesharecdn.com/thesispresentationjan-12-2012-151104082441-lva1-app6891/75/Probability-Collectives-43-2048.jpg)
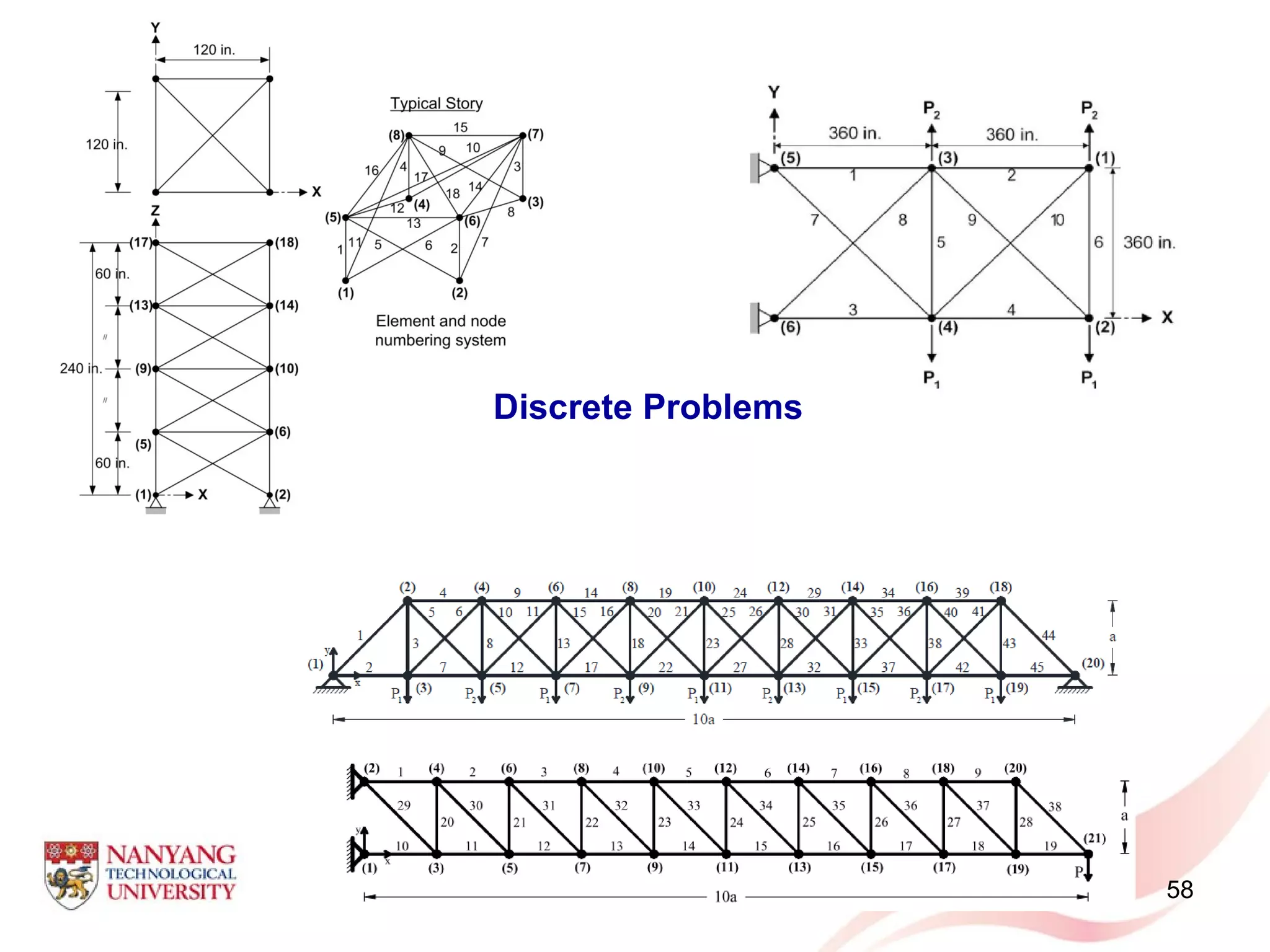
![57
• Discrete Problems
Variables GA
[31]
HS
[34]
PSO
[36]
PSOPC
[36]
HPSO
[36]
DHPSACO
[37]
Proposed
PC
0.4 0.01 0.01 0.01 0.01 0.01 0.01
2.0 2.0 2.6 2.0 2.0 1.6 0.4
3.6 3.6 3.6 3.6 3.6 3.2 3.6
0.01 0.01 00.01 0.01 0.01 0.01 0.01
0.01 0.01 0.4 0.01 0.01 0.01 2
0.8 0.8 0.8 0.8 0.8 0.8 0.8
2.0 1.6 1.6 1.6 1.6 2.0 0.01
2.4 2.4 2.4 2.4 2.4 2.4 4
563.52 560.59 566.44 560.59 560.59 551.61 477.16684
Variables GA
[31]
PSO
[36]
PSOPC
[36]
HPSO
[36]
DHPSACO
[37]
Proposed
PC
0.307 1.000 0.111 0.111 0.111 0.111
1.990 2.620 1.563 2.130 2.130 0.563
3.130 2.620 3.380 3.380 3.380 3.13
0.111 0.250 0.111 0.111 0.111 0.141
0.141 0.307 0.111 0.111 0.111 1.8
0.766 0.602 0.766 0.766 0.766 0.766
1.620 1.457 1.990 1.620 1.620 0.111
2.620 2.880 2.380 2.620 2.620 3.88
556.49 567.49 567.49 551.14 551.14 464.14708
Case 1: The discrete variables are selected from
the set
{0.01, 0.4, 0.8, 1.2, 1.6, 2.0, 2.4, 2.8, 3.2, 3.6,
4.0, 4.4, 4.8, 5.2, 5.6, 6.0}
.](https://image.slidesharecdn.com/thesispresentationjan-12-2012-151104082441-lva1-app6891/75/Probability-Collectives-57-2048.jpg)

![71
Probability Collectives (PC) Comparison
Proposed PC Original PC [1, 3]
Neighboring
Sample around the
‘favorable strategy values’
and continue from the beginning.
Narrows down the sampling
options of Agents forcing
them to sample only from the
neighbored range.
Increases convergence
speed.
Computationally cheaper
Regression
Data-aging
Computationally
expensive/Large
memory](https://image.slidesharecdn.com/thesispresentationjan-12-2012-151104082441-lva1-app6891/75/Probability-Collectives-71-2048.jpg)

![Constrained PC (Approach 3): Feasibility-based Rule I
• Procedure starts with initializing the constraint violation tolerance
where is the cardinality of .
Feasibility-based Rule I
• Any feasible solution is preferred over any infeasible solution
If the current system objective as well as the previous
solution are infeasible, accept the current system objective
and corresponding as the current solution if the number of
constraints violated is less than or equal to , i.e. ,
and then the value of is updated to , i.e. .
73
µ = C [ ]1 2 ... tg g g=CC
[ ]
( )fav
G Y
[ ]fav
Y
[ ]
( )fav
G Y
violatedC µ violatedC µ≤
µ violatedC violatedCµ =](https://image.slidesharecdn.com/thesispresentationjan-12-2012-151104082441-lva1-app6891/75/Probability-Collectives-73-2048.jpg)
![Constrained PC (Approach 3): Feasibility-based Rule I
• Between two feasible solutions, the one with better objective is
preferred
If the current system objective is feasible, and the previous
solution is infeasible, accept the current system objective
and corresponding as the current solution and then the value of
is updated to , i.e. .
74
[ ]
( )fav
G Y
[ ]fav
Y
[ ]
( )fav
G Y
0
µ
0violatedCµ = =](https://image.slidesharecdn.com/thesispresentationjan-12-2012-151104082441-lva1-app6891/75/Probability-Collectives-74-2048.jpg)
![Constrained PC (Approach 3): Feasibility-based Rule I
• Between two infeasible solutions, the one with fewer violated
constraints is preferred.
If the current system objective is feasible, i.e. and
is not worse than the previous feasible solution, accept the current
system objective and corresponding as the current
solution.
• If all the above conditions are not met, then discard current system
objective and corresponding , and retain the previous
iteration solution.
75
[ ]
( )fav
G Y
[ ]fav
Y
[ ]
( )fav
G Y
0violatedC =
[ ]
( )fav
G Y [ ]fav
Y](https://image.slidesharecdn.com/thesispresentationjan-12-2012-151104082441-lva1-app6891/75/Probability-Collectives-75-2048.jpg)
![Constrained PC (Approach 3): Feasibility-based Rule I
Updating of the Sampling Space and Perturbation Approach
• On completion of pre-specified iterations,
• If then shrink the sampling intervals:
• If and are feasible and
the system objective is referred to as .
76
[ ] [ ], ,
( ) ( )testfav n fav n n
G G
−
≤Y Y
testn
[ ]
( ) [ ]
( ), , 0 1
fav favupper lower upper lower
i i down i i i down i i downX Xλ λ λ Ψ ∈ − Ψ − Ψ + Ψ − Ψ < ≤
[ ],
( )
fav n
G Y [ ],
( )testfav n n
G
−
Y
[ ] [ ], ,
( ) ( )testfav n fav n n
G G ε−
− ≤Y Y
[ ],
( )
fav n
G Y [ ],
( )
fav s
G Y](https://image.slidesharecdn.com/thesispresentationjan-12-2012-151104082441-lva1-app6891/75/Probability-Collectives-76-2048.jpg)
![Constrained PC (Approach 3): Feasibility-based Rule I
• Updating of the Sampling Space and Perturbation Approach
In order to jump out of this possible local minimum, every agent
perturbs its current feasible strategy
The value of and +/- sign are selected based on preliminary trials.
Every agent expands the sampling space as follows:
77
i
[ ] [ ] [ ]
( )
( ) [ ]
( ) [ ]
1 1
2 2
1
,
1
,
fav fav fav
i i i i
lower upper
fav
i
i
lower upper
fav
i
X X X fact
randomvalue if
X
where fact
randomvalue if
X
σ σ γ
σ σ γ
= ± ×
∈ ≤
=
∈ >
1 1 2 20 1lower upper lower upper
σ σ σ σ< < ≤ < <
γ
( ) ( ), , 0 1lower upper lower upper upper lower
i i up i i i up i i upλ λ λ Ψ ∈ Ψ − Ψ − Ψ Ψ + Ψ − Ψ < ≤
](https://image.slidesharecdn.com/thesispresentationjan-12-2012-151104082441-lva1-app6891/75/Probability-Collectives-77-2048.jpg)

![Constrained PC (Approach 3): Feasibility-based Rule II
Feasibility-based Rule II:
• Any feasible solution is preferred over any infeasible solution
If the current system objective as well as the previous
solution are infeasible, accept the current system objective
and corresponding as the current solution if the number of
improved constraints is greater than or equal to , i.e. ,
and then the value of is updated to , i.e. .
80
[ ]
( )fav
G Y
[ ]fav
Y
[ ]
( )fav
G Y
µ improvedC µ≥
µ improvedC improvedCµ =](https://image.slidesharecdn.com/thesispresentationjan-12-2012-151104082441-lva1-app6891/75/Probability-Collectives-80-2048.jpg)
![Constrained PC (Approach 3): Feasibility-based Rule II
• Between two feasible solutions, the one with better objective is
preferred
If the current system objective is feasible, and the previous
solution is infeasible, accept the current system objective
and corresponding as the current solution and then the value of
is updated to , i.e. .
• Between two infeasible solutions, the one with more number of
improved constraint violations is preferred.
If the current system objective is feasible, and is not worse
than the previous feasible solution, accept the current system
objective and corresponding as the current solution.
81
[ ]
( )fav
G Y
[ ]fav
Y
[ ]
( )fav
G Y
0
µ
0improvedCµ = =
[ ]
( )fav
G Y
[ ]fav
Y
[ ]
( )fav
G Y](https://image.slidesharecdn.com/thesispresentationjan-12-2012-151104082441-lva1-app6891/75/Probability-Collectives-81-2048.jpg)
![Constrained PC (Approach 3): Feasibility-based Rule II
• If the solution remains feasible and unchanged for successive
predefined number of iterations, and current feasible system
objective is worse than the previous iteration feasible solution,
accept the current solution.
If the solution remains feasible and unchanged for successive pre-
specified iterations i.e. and are feasible and ,
and the current feasible system objective is worse than the previous
iteration feasible solution, accept the current system objective
and corresponding as the current solution.
82
( )[ ],fav n
G Y
[ ]fav
Y
testn ( )[ ], testfav n n
G −
Y
( )[ ]fav
G Y](https://image.slidesharecdn.com/thesispresentationjan-12-2012-151104082441-lva1-app6891/75/Probability-Collectives-82-2048.jpg)

![84
Formulation of Unconstrained PC
{ }[1] [?] [?] [1] [?] [?]
1 2 1, ,..., ,..., ,i i N NX X X X X−=Y
Agent selects its first strategy and samples randomly from other
agents’ strategies as well.
( )[1]
iG Y
[ ] [ ] [ ][1] [2] [1] [2] [1] [2]
1 1 1 1{ , ,..., } ,..., { , ,..., } ,..., { , ,..., }N i Nm m m
i i i i N N N NX X X X X X X X X= = =X X X
{ } ( )
{ } ( )
{ } ( )
{ } ( )
[2] [?] [?] [2] [?] [2]
1 2
[3] [?] [?] [3] [?] [3]
1 2
[ ] [?] [?] [ ] [?] [ ]
1 2
[ ] [ ] [ ][?] [?] [?]
1 2
, ,..., ,...,
, ,..., ,...,
, ,..., ,...,
, ,..., ,...,i i i
i i N i
i i N i
r r r
i i N i
m m m
i i N i
X X X X G
X X X X G
X X X X G
X X X X G
= ⇒
= ⇒
= ⇒
= ⇒
Y Y
Y Y
Y Y
Y Y
M
M
( )[ ]
1
im
r
i
r
G
=
⇒ ∑ Y
i](https://image.slidesharecdn.com/thesispresentationjan-12-2012-151104082441-lva1-app6891/75/Probability-Collectives-84-2048.jpg)
![Formulation of Unconstrained PC
85
0
0.05
0.1
0.15
1 2 3 4 5 6 7 8 9 10
0
0.05
0.1
0.15
1 2 3 4 5 6 7 8 9 10
[ ]
( ) [ ]
( )1
1 1 1... 1/im
q X q X m= = = [ ]
( ) [ ]
( )1
... 1/im
N N Nq X q X m= = =
L
0
0.05
0.1
0.15
1 2 3 4 5 6 7 8 9 10
L
[ ]
( ) [ ]
( )1
... 1/im
i i iq X q X m= = =
Agent 1 Agent i Agent N
{ }
{ }
{ }
[2] [?] [2] [?]
1
[ ] [?] [ ] [?]
1
[ ] [ ][?] [?]
1
,..., ,...,
,..., ,...,
,..., ,...,i i
i i N
r r
i i N
m m
i i N
X X X
X X X
X X X
=
=
=
Y
Y
Y
M
M
( )( )[ ]
1
im
r
i
r
E G
=
∑ Y
( ) ( ) ( ){ } [ ]
( ) [ ]
( ) ( )
[ ]
( )( )
( )( )
( ) ( ) ( ){ } [ ]
( ) [ ]
( ) ( )
[ ]
( )( )
( )( )
( ) ( ) ( ){ } [ ]
( ) [ ]
( ) ( )
[ ]
( )( )
( )( )
1 1 1[?] [2] [?] [2]
1
[?] [ ] [?] [ ]
1
[ ] [ ][?] [?]
1
,..., ,..., Y
,..., ,..., Y
,..., ,..., Y i i ii i
i N i i ii
i
r r rr r
i N i i ii
i
m m mm m
i N i i ii
i
q X q X q X G q X q X E G
q X q X q X G q X q X E G
q X q X q X G q X q X E G
⇒ =
⇒ =
⇒ =
∏
∏
∏
Y
Y
Y
M
M](https://image.slidesharecdn.com/thesispresentationjan-12-2012-151104082441-lva1-app6891/75/Probability-Collectives-85-2048.jpg)
![86
[ ]
( )( ) [ ]
( ) [ ]
( ) ( )
[ ]
( )( )
Y
r r r r
i i i i
i
E G G q X q X= ∏Y
[ ]
( ) [ ] [ ]
( )
[ ]
( )
?
1 1
( ) (Y ) ( ) ( )
i im m
r r r
i i i i
r r i
E G G q X q X
= =
=∑ ∑ ∏Y](https://image.slidesharecdn.com/thesispresentationjan-12-2012-151104082441-lva1-app6891/75/Probability-Collectives-86-2048.jpg)











































































![Vibe Coding vs. Spec-Driven Development [Free Meetup]](https://cdn.slidesharecdn.com/ss_thumbnails/vibecodingvsspecdrivendevelopment-251209105622-43f455e7-thumbnail.jpg?width=640&height=640&fit=bounds)