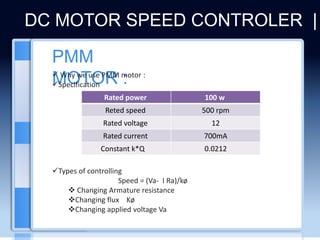
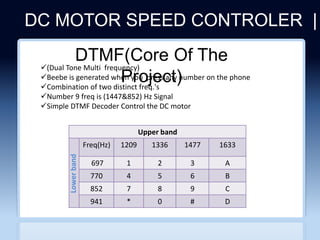
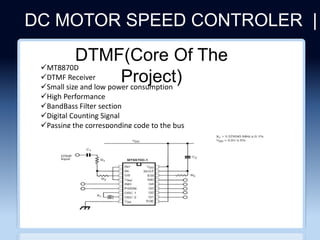
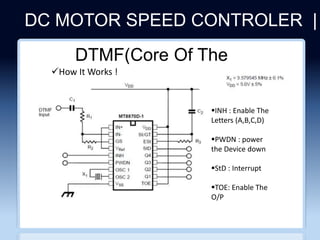
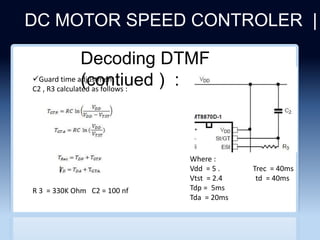
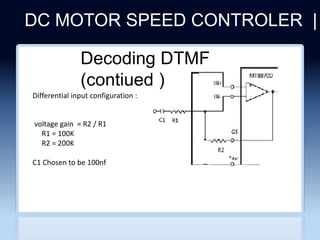
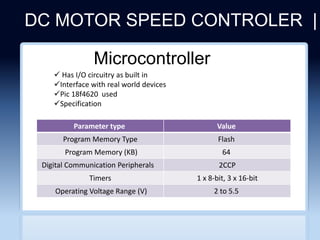
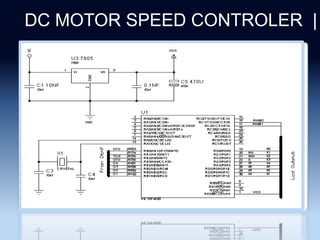
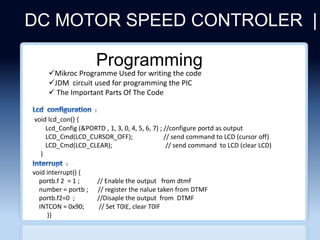
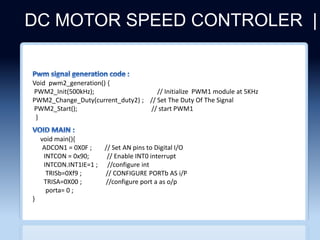
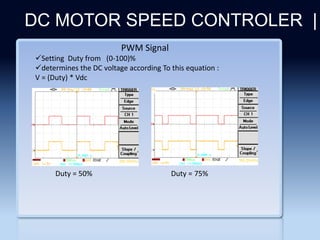
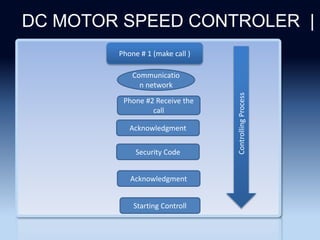
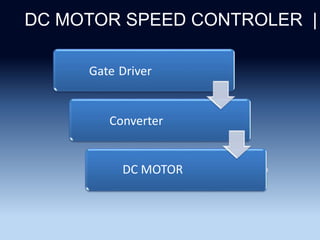
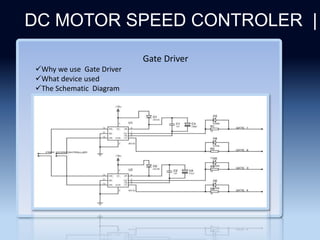
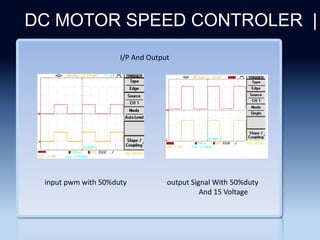
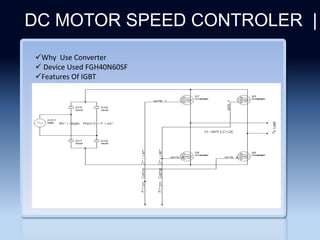
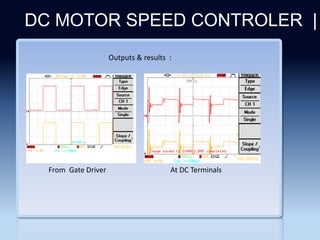
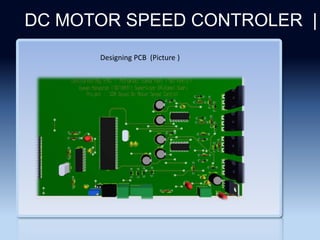
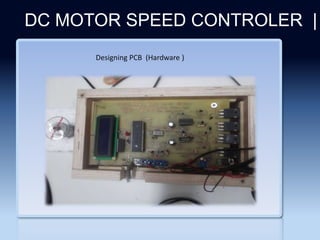
The document describes a DC motor speed controller project that uses DTMF signals from a phone to control the speed of a DC motor. A PIC microcontroller receives DTMF signals from a phone and generates PWM signals to control an IGBT and drive the motor speed. The system was designed and a PCB was made to test the speed control of a 100W DC motor from a phone remotely. Future work may include improving the design to control larger motors and monitor devices remotely in homes.



























![Share 'speed control_of_dc_motor_using_microcontroller.pptx'[1][1]](https://cdn.slidesharecdn.com/ss_thumbnails/sharespeedcontrolofdcmotorusingmicrocontroller-181012151950-thumbnail.jpg?width=640&height=640&fit=bounds)






















