Download to read offline
![Real-time SOA Yann-Hang Lee, Wei-Tek Tsai, and Yinong Chen Computer Science and Engineering Department Arizona State University [email_address] Real-time Embedded System Lab, ASU](https://image.slidesharecdn.com/ppt4924/75/ppt-1-2048.jpg)








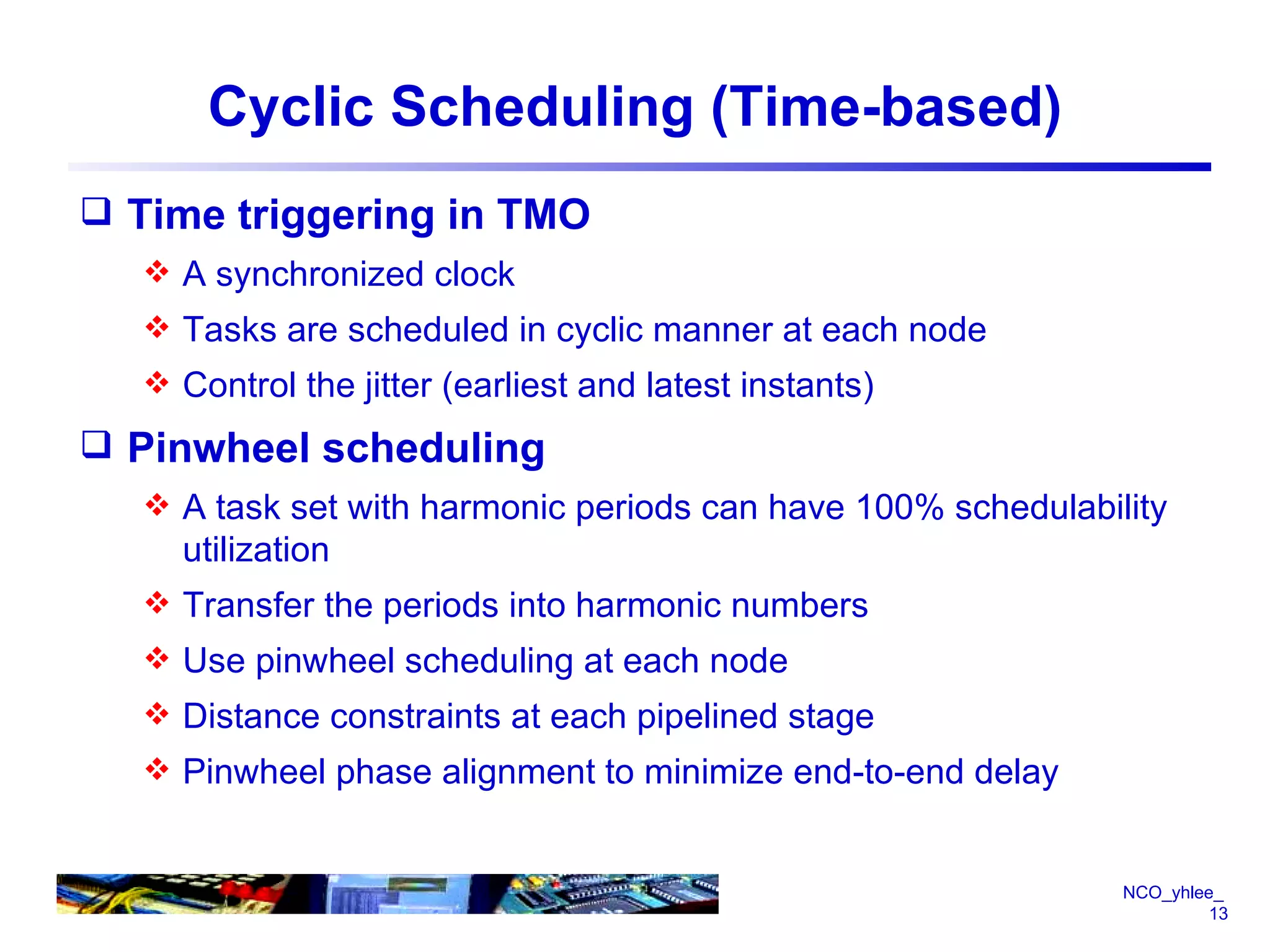
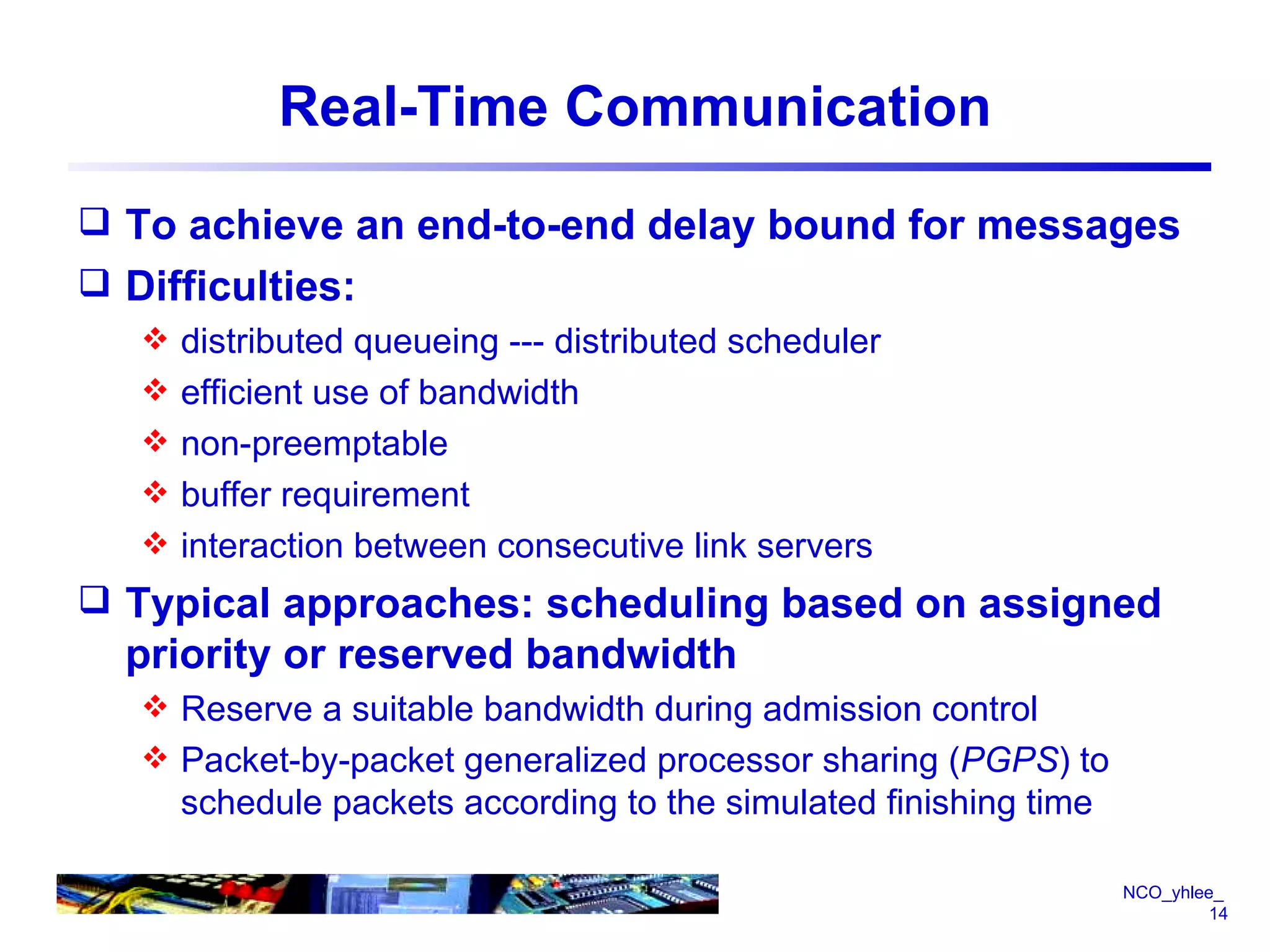



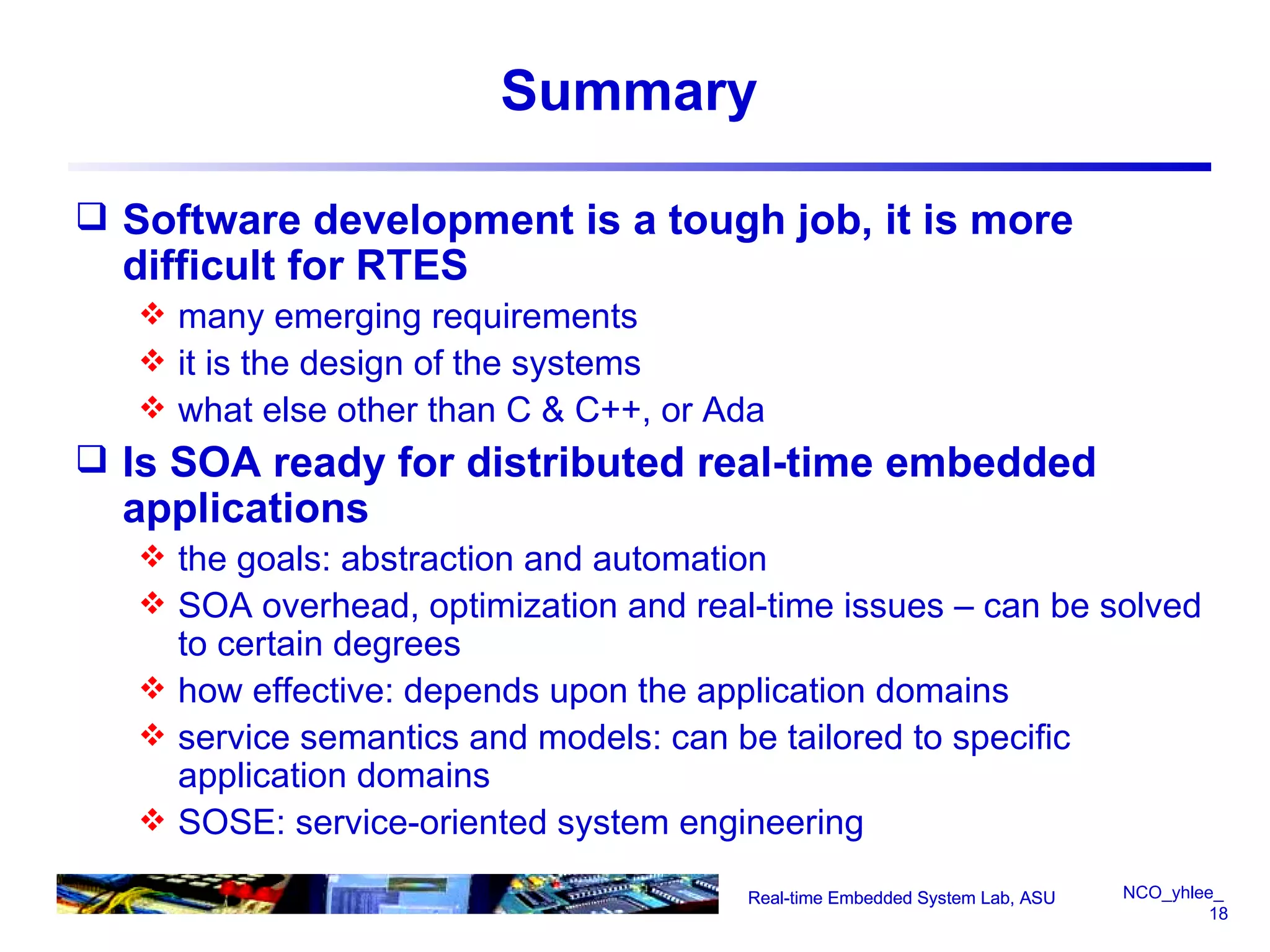













The document discusses applying a service-oriented architecture (SOA) approach to real-time embedded systems. Key challenges include meeting timing constraints for service invocations in distributed systems and scheduling services across nodes. The authors propose a real-time SOA model with periodic and aperiodic services. They also describe techniques like rate-monotonic scheduling and pinwheel scheduling to assign priorities and allocate bandwidth to ensure bounded message delays and meet end-to-end deadlines. Ontologies are suggested to generate plans from reusable templates for different application domains. While SOA for real-time systems faces issues, the authors believe the approach can be effective if models and optimization methods are tailored to application requirements and service semantics.