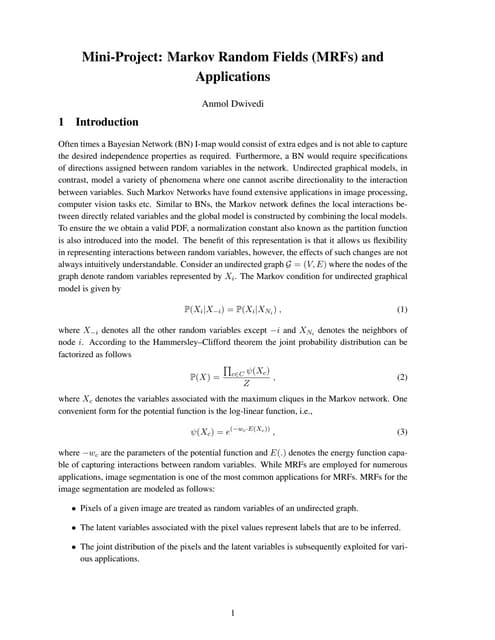
This thesis applies Bayesian analysis and Markov random field (MRF) models with MCMC-Gibbs sampling to segment brain MR images into three classes: gray matter, white matter, and cerebrospinal fluid. Synthetic data is used to evaluate the MRF method under different noise conditions. Real brain MR images are also segmented. The MRF model characterizes the spatial dependencies between image pixels. MCMC sampling is used to estimate the posterior distribution and perform segmentation. The results demonstrate the MRF approach can accurately segment images, with better performance on lower noise images.







![3 Acknowledgment
I am deeply grateful to my advisor, Professor Henning Omre of the University of NTNU, Professor Arnoldo
Frigessi University of Oslo,Endale Berhane, Doctor Ayele Taye Of Hawassa University and Guro Dørum for
their valuable comments and moral.
References
[1] Held, K., Kops, E.R., Krause, B.J., Wells, W.M., III, Kikinis, R., and Muller, W.H.-Gartner; 1997:
Markov Random Field Segmentation of Brain MR Images, IEEE Transactions on Medical Imaging,
Vol. 16, No. 6, pp. 878-886
[2] Leemput, K.Van, Maes, F., Vandermeulen, D. and Suetens, P.; 1999: Automated Model-Based Tissue
Classification of MR Images of the Brain, IEEE Transactions on Medical Imaging, Vol. 18, No. 10, pp.
897-908.
[3] Wu, J., Student Member, IEEE, and Chung, A.; 2007: A Segmentation Model Using Compound Markov
Random Fields Based on a Boundary Model, IEEE Transactions on Image Processing, Vol. 16, No. 1,
pp. 241-252
[4] Hollenberg,L.; 2006: Modeling, Analysis and Visualization, The query complexity of estimating weighted
averages, Lecture. 19, pp. 1-12.
[5] Ibrahim, M., John, N., Kabuka, M., Younis, A.; 2006: Hidden Markov models-based 3D MRI brain
segmentation, Image and Vision Computing, Vol. 24, pp. 1065-1079.
[6] Khayatia, R., Vafadusta, M., Towhidkhaha,F., Nabavib, S.M.; 2008: Fully automatic segmentation
of multiple sclerosis lesions in brain MRFLAIR images using adaptive mixtures method and Markov
random field model, Computers in Biology and Medicine, Vol. 38, pp. 379390.
8](https://image.slidesharecdn.com/07e75b45-aea6-4ebc-89f7-e4c54c6f7a3d-160206122402/85/Poster-3-1-8-320.jpg)