Poster Competition - Hwan Lee
•
1 like•118 views

This document summarizes research using the Microsoft Kinect v2 depth camera for markerless motion capture of vehicle occupants. The Kinect was able to track joints in real-time and its portability allowed testing in an actively moving vehicle. Software was developed to improve data accuracy, including removing background noise, reducing noise, and predicting joint locations. Various motions were tested with and without a vehicle mockup and compared to a Vicon motion capture system. The results indicate the Kinect system is reliable for motion analysis in vehicles but has limitations when joints are occluded. Further research will explore using multiple Kinect sensors simultaneously and improving joint tracking through motion databases.

More Related Content
Viewers also liked
Viewers also liked (8)
Similar to Poster Competition - Hwan Lee
Similar to Poster Competition - Hwan Lee (20)
Poster Competition - Hwan Lee
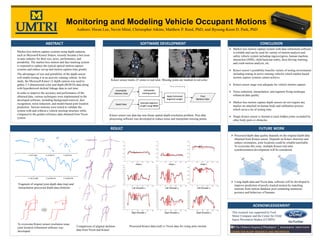
- 1. Marker-less motion capture systems using depth cameras, such as Microsoft Kinect Sensor, recently became a hot issue in auto industry for their size, price, performance, and portability. The marker-less motion and face tracking system is expected to replace the typical optical motion capture systems and reduce set-up and motion capture time greatly. The advantages of size and portability of the depth sensor will enable testing it in an actively running vehicle. In this study, the Microsoft Kinect v2 depth camera was used to gather 2.5-dimensional color and depth (RGB-D) data along with hypothesized skeletal linkage data in real time. In order to improve the accuracy and performance of the obtained data, various techniques were implemented in the developed software, including background removal, face recognition, noise reduction, and model-based joint location prediction. Various motions were tested to validate the system with and without a vehicle mockup structure while compared to the golden reference data obtained from Vicon system. Authors: Hwan Lee, Nevin Mital, Christopher Atkins; Matthew P. Reed, PhD; and Byoung-Keon D. Park, PhD CONCLUSION RESULT 11:24:31:850 11:24:38:515 11:24:45:379 11:24:52:92 11:24:58:756 2.0 2.2 2.4 2.6 2.8 3.0 3.2 3.4 A 11:24:31:850 11:24:38:515 11:24:45:379 11:24:52:92 11:24:58:756 1800 2000 2200 2400 2600 2800 3000 3200 3400 C20 A 0 500 1000 1500 2000 2500 0 100 200 300 400 500 Head x 0 500 1000 1500 2000 2500 200 300 400 500 600 700 Head y 0 500 1000 1500 2000 2500 2000 2100 2200 2300 2400 2500 Head z 0 500 1000 1500 2000 2500 -100 -50 0 50 100 150 200 250 300 350 400 Left Shoulder x 0 500 1000 1500 2000 2500 100 150 200 250 300 350 400 450 500 550 600 Left Shoulder y 0 500 1000 1500 2000 2500 2100 2200 2300 2400 2500 Left Shoulder z 0 500 1000 1500 2000 2500 200 250 300 350 400 450 500 550 600 650 700 Right Shoulder x 0 500 1000 1500 2000 2500 0 50 100 150 200 250 300 350 400 450 500 Right Shoulder y 0 500 1000 1500 2000 2500 2050 2100 2150 2200 2250 2300 2350 2400 2450 2500 Right Shoulder z ABSTRACT FUTURE WORK ACKNOWLEDGEMENT This research was supported by Ford Motor Company and the Center for Child Injury Prevention Studies (CChIPS) Fragment of original joint depth data (top) and interpolation processed depth data (bottom) Comparision of aligned skeleton data from Vicon and Kinect SOFTWARE DEVELOPMENT Kinect sensor tracks 25 joints in real time. Missing joints are marked in red color. Marker-less motion capture system with data refinement software is reliable and can be used for variety of motion analysis and safety vehicle system including ingress/egress, human machine interaction (HMI), child backseat safety, doze driving warning, and crash motion analysis, etc. Kinect sensor’s portability benefits variety of testing environment including testing in active running vehicles which marker-based motion capture systems cannot achieve. Kinect sensor range was adequate for vehicle motion capture. Noise reduction, interpolation, and segment fixing technique enhanced data quality. Marker-less motion capture depth sensors do not require any marker set attached on human body and calibration process which saves a lot of testing time. Single Kinect sensor is limited to track hidden joints occluded by other body parts or obstacles. Kinect sensor raw data has non-linear spatial depth-resolution problem. Post data processing software was developed to reduce noise and interpolate missing points. To overcome Kinect sensor resolution issue, joint location refinement software was developed. Processed Kinect data (red) vs Vicon data for rising arms motion Processed depth data quality depends on the original depth data obtained from Kinect sensor. Depends on Kinect direction and subject orientation, joint locations could be reliable/unreliable. To overcome this issue, multiple Kinect real-time synchronization development will be considered. Using depth data and Vicon data, software will be developed to improve prediction of poorly tracked motion by matching motions from motion database pool containing numerous postures and behaviors of humans. Monitoring and Modeling Vehicle Occupant Motions