











![Intel Confidential
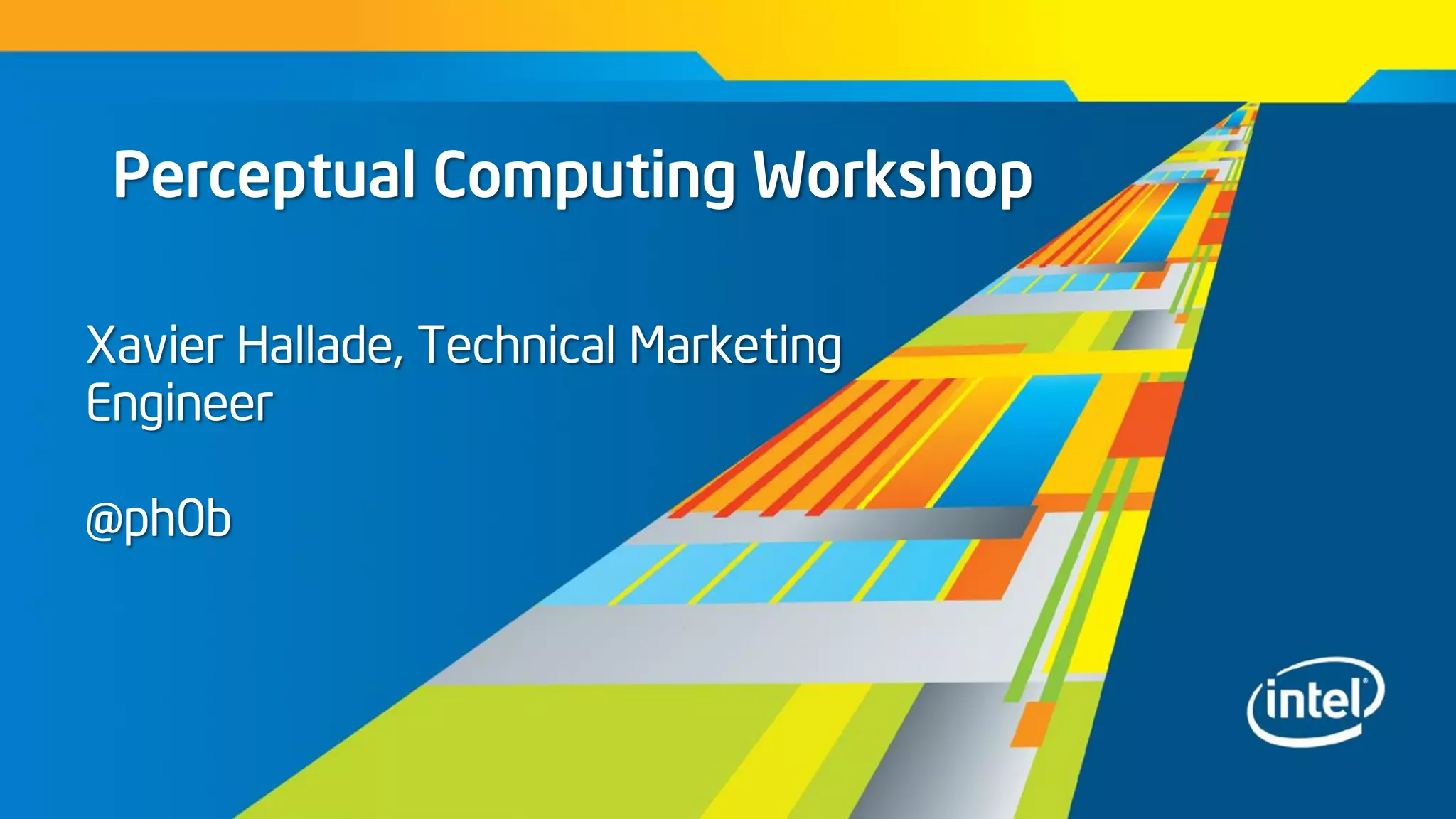
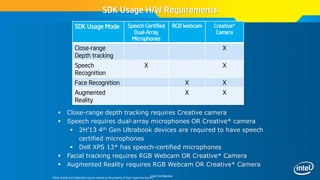
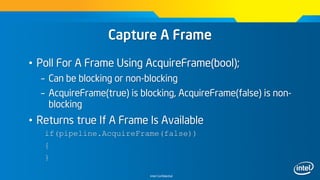
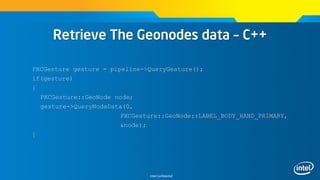
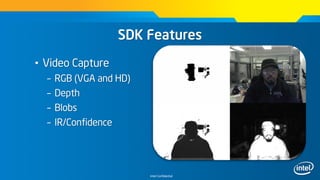
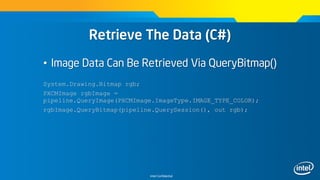
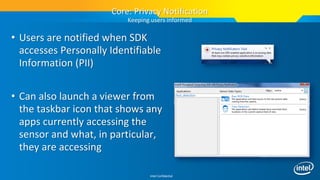
Retrieve The Data (C++)
• Data Is Retrieved via QueryImage() And Accessing The
Data Buffers
• Image Is Retrieved as PXCImage, Data Is Accessed Via
PXCImage::ImageData.planes
PXCImage rgb = pipeline.QueryImage(PXCImage::IMAGE_TYPE_COLOR);
PXCImage::ImageData rgbData;
rgb->AcquireAccess(PXCImage::ACCESS_READ, &rgbData);
//Data can be loaded from rgbData.planes[0]
rgb->ReleaseAccess(&rgbData);](https://image.slidesharecdn.com/perceptualsdkworkshop-130617072956-phpapp01/85/Perceptual-Computing-Workshop-a-Paris-45-320.jpg)

![Intel Confidential
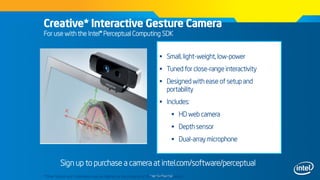
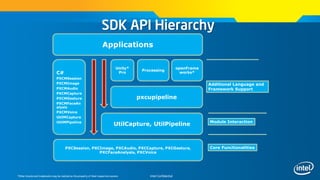
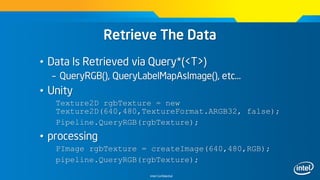
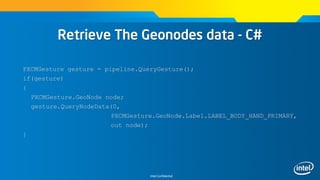
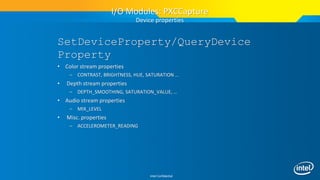
class PXCDVTracker: public PXCBase
{
enum TargetType
{
TARGET_UNDEFINED,
TARGET_PLANE,
TARGET_OBJECT3D,
TARGET_FACE,
TARGET_PLANEBLACKBOX,
TARGET_MARKER
};
typedef struct
{
TrackingStatus status; // (-1) not initialized, 0 not tracking (recognition in process), 1 tracking
pxcF64 position[3]; // Resulting pose (X,Y, Z)
pxcF64 orientation[4]; // Quaternion to express the orientation
int index; // Recognized keyFrame index (-1 none)
} TargetData;
QueryProfile(…); // Retrieve configuration(s)
SetProfile(…); // Set active configuration
GetTargetCount(…); //
ActivateTarget(…); // Retrieve object tracking data
GetTargetData(…); //
ProcessImageAsync(…); // Data processing
};
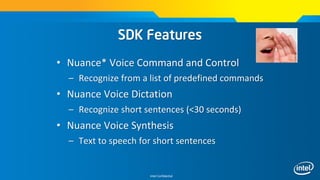
Algorithm Modules: PXCDVTracker
Module Interface](https://image.slidesharecdn.com/perceptualsdkworkshop-130617072956-phpapp01/85/Perceptual-Computing-Workshop-a-Paris-51-320.jpg)




![Intel Confidential
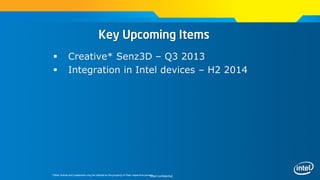
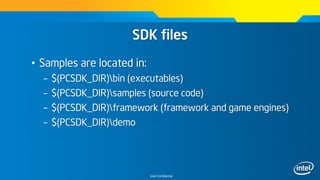
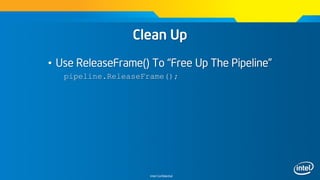
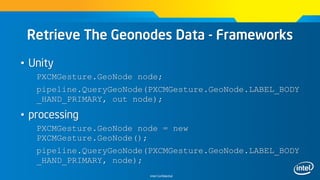
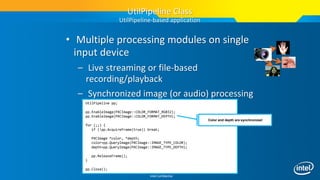
class MyHandler: public PXCVoiceRecognition::Recognition::Handler, public PXCVoiceRecognition::Alert::Handler
{
public:
MyHandler(std::vector<pxcCHAR*> &commands) { this->commands = commands; }
virtual void PXCAPI OnRecognized(PXCVoiceRecognition::Recognition *cmd)
{
wprintf_s(L"nRecognized: <%s>n", (cmd->label>=0)?commands[cmd->label]:cmd->dictation);
}
virtual void PXCAPI OnAlert(PXCVoiceRecognition::Alert *alert)
{
switch (alert->label)
{
case PXCVoiceRecognition::Alert::LABEL_SNR_LOW:
wprintf_s(L"nAlert: <Low SNR>n");
break;
case PXCVoiceRecognition::Alert::LABEL_VOLUME_LOW:
wprintf_s(L"nAlert: <Low Volume>n");
break;
case PXCVoiceRecognition::Alert::LABEL_VOLUME_HIGH:
wprintf_s(L"nAlert: <High Volume>n");
break;
default:
wprintf_s(L"nAlert: <0x%x>n",alert->label);
break;
}
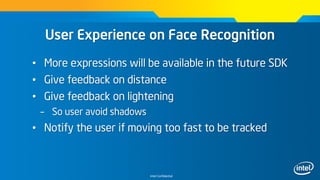
Algorithm Modules: PXCVoiceSynthesis
Voice recognition example – callback handlers](https://image.slidesharecdn.com/perceptualsdkworkshop-130617072956-phpapp01/85/Perceptual-Computing-Workshop-a-Paris-57-320.jpg)
![Intel Confidential
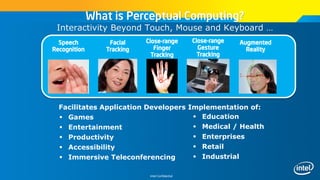
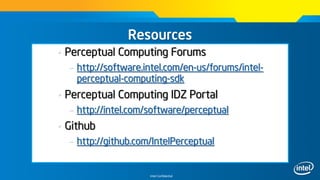
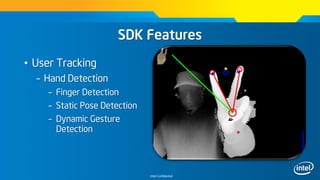
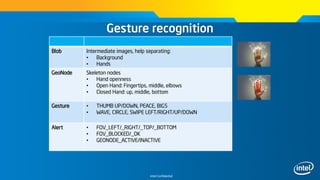
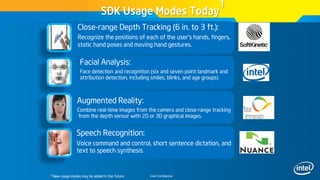
class PXCVoiceSynthesis: public PXCBase
{
public:
PXC_CUID_OVERWRITE(PXC_UID('V','I','T','S'));
struct ProfileInfo {
enum Language {
LANGUAGE_US_ENGLISH=1,
};
enum Voice {
VOICE_MALE,
VOICE_FEMALE,
};
PXCCapture::AudioStream::DataDesc outputs; // output format, need bufferSize to limit the latency.
Language language;
Voice voice;
pxcU32 reserved[6];
};
virtual pxcStatus PXCAPI QueryProfile(pxcU32 pidx, ProfileInfo *pinfo)=0;
pxcStatus __inline QueryProfile(ProfileInfo *pinfo) { return QueryProfile(WORKING_PROFILE,pinfo); }
virtual pxcStatus PXCAPI SetProfile(ProfileInfo *pinfo)=0;
virtual pxcStatus PXCAPI QueueSentense(pxcCHAR *sentence, pxcU32 nchars, pxcUID *id)=0;
virtual pxcStatus PXCAPI ProcessAudioAsync(pxcUID id, PXCAudio **audio, PXCScheduler::SyncPoint **sp)=0;
};
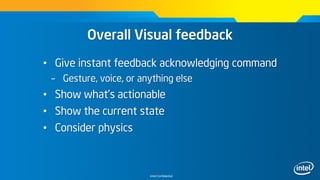
Algorithm Modules: PXCVoiceSynthesis
Module Interface](https://image.slidesharecdn.com/perceptualsdkworkshop-130617072956-phpapp01/85/Perceptual-Computing-Workshop-a-Paris-58-320.jpg)







![Intel Confidential
class MyPipeline: public UtilPipeline {
public:
MyPipeline(void):UtilPipeline() {
EnableGesture();
}
virtual void PXCAPI OnGesture
(PXCGesture::Gesture *data) {
printf_s(“%dn”,data->label);
}
};
int wmain(int argc, WCHAR* argv[]) {
MyPipeline pipeline;
pipeline.LoopFrames();
return 0;
}
class MyPipeline: UtilMPipeline {
public MyPipeline():base() {
EnableGesture();
}
public override void OnGesture
(ref PXCMGesture.Gesture data) {
Console.WriteLn(data.label);
}
};
class Program {
static void Main(string[] args) {
MyPipeline pipeline=new MyPipeline();
pipeline.LoopFrames();
pipeline.Dispose();
}
}
C++ C#
Enable Finger Tracking
Gesture Callback
Data Flow Loops
UtilPipeline Class
Gesture Recognition “Hello World”](https://image.slidesharecdn.com/perceptualsdkworkshop-130617072956-phpapp01/85/Perceptual-Computing-Workshop-a-Paris-70-320.jpg)

![Intel Confidential
Sample Snippet (processing)
• Declarations
import intel.pcsdk.*;
PXCUPipeline pxc;
int[] cm = new int[2]; //color map dimensions
int[] dm = new int[2]; //depth map dimensions
short[] buffer;
Pimage rgb, depth;](https://image.slidesharecdn.com/perceptualsdkworkshop-130617072956-phpapp01/85/Perceptual-Computing-Workshop-a-Paris-76-320.jpg)
![Intel Confidential
Sample Snippet (processing)
• Initialization
void setup()
{
pxc = new PXCUPipeline(this);
if(!pxc.Init(PXCUPipeline.Mode.COLOR_VGA|PXCUPipeline.Mode.GESTURE))
println(“Error initializing PerC SDK”);
if(pxc.QueryRGBSize(cm))
rgb = createImate(cm[0], cm[1], RGB);
if(pxc.QueryDepthMapSize(dm))
{
buffer = new short[dm[0]*dm[1]];
depth = createImage(dm[0], dm[1], RGB);
}
size(640,480);
}](https://image.slidesharecdn.com/perceptualsdkworkshop-130617072956-phpapp01/85/Perceptual-Computing-Workshop-a-Paris-77-320.jpg)




The document provides information about Intel's Perceptual Computing SDK and related hardware and software. It discusses the Creative Interactive Gesture Camera that can be used with the SDK for close-range interactivity. It also outlines key upcoming products, an overview of perceptual computing capabilities like facial tracking and gesture recognition, hardware and software requirements, supported programming languages and frameworks, and resources for using the SDK.











![[02][cuda c 프로그래밍 소개] gateau intro to_cuda_c](https://cdn.slidesharecdn.com/ss_thumbnails/02cudacgateauintrotocudac-110106231409-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)









































![[HACKATHON CISCO PARIS] Slideshow du workshop Smart City](https://cdn.slidesharecdn.com/ss_thumbnails/ciscoparisworkshopopeningslideshow-160325094835-thumbnail.jpg?width=640&height=640&fit=bounds)

![[Workshop e résidents] présentation intent, craft ai, dalkia et incubateur](https://cdn.slidesharecdn.com/ss_thumbnails/workshope-rsidentsprsentationintentcraftaidalkiaetincubateur-160202110412-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Webinar E-résidents #1] Présentation des différents métiers du bâtiment conn...](https://cdn.slidesharecdn.com/ss_thumbnails/prsentationpourlehackathon201601v2-160120114429-thumbnail.jpg?width=640&height=640&fit=bounds)
![[IoT World Forum Webinar] Review of CMX Cisco technology](https://cdn.slidesharecdn.com/ss_thumbnails/cmxtechnologiecisco-151204102222-lva1-app6891-thumbnail.jpg?width=640&height=640&fit=bounds)






















