Download to read offline
![Intel Confidential10
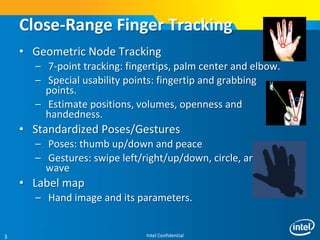
PXCImage: Depth & Color
IMAGE_TYPE_COLOR
(of any color format)
• planes[0]: color
data
• Planes[1]: empty
• planes[2]: empty
• planes[3]: empty
IMAGE_FORMAT_DEPTH
•planes[0]: depthmap
•Planes[1]: confidencemap
•planes[2]: uvmap
•planes[3]: empty
2-byte per
pixel
8-byte per
pixel
IMAGE_FORMAT_VERTICES
•planes[0]: vertex (x,y,z)
•Planes[1]: confidencemap
•planes[2]: uvmap
•planes[3]: empty
12-byte
per pixel
One real depth stream, two virtual](https://image.slidesharecdn.com/percforunitydevs-130605111054-phpapp02/85/Per-c-for-unity-devs-10-320.jpg)
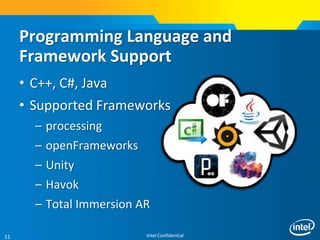
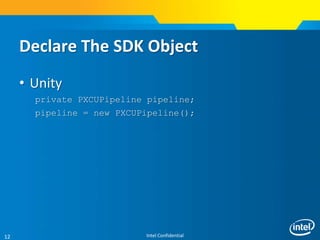
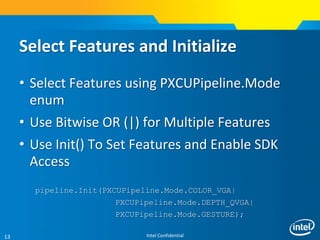
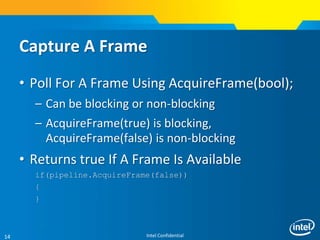
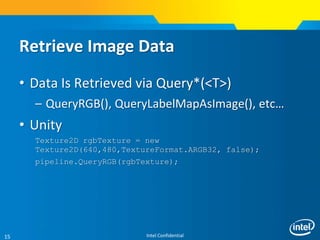
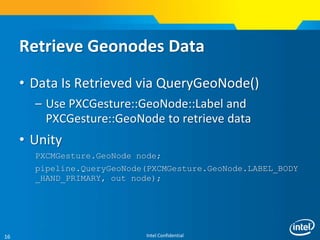

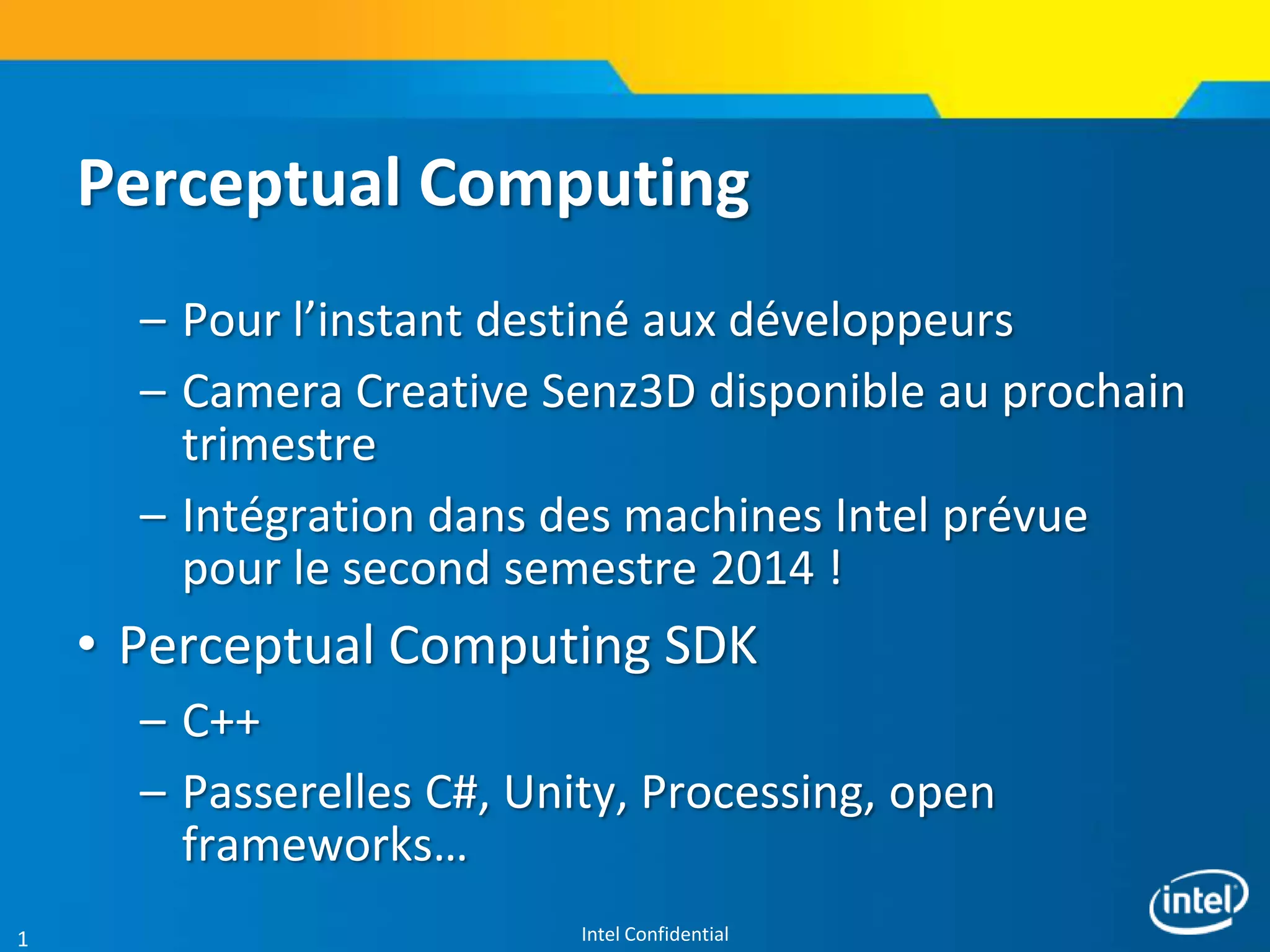
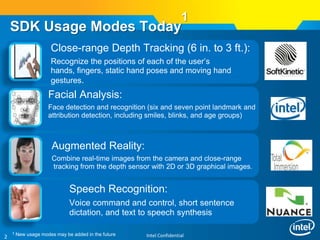
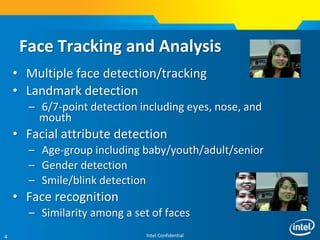
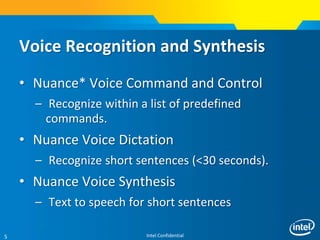
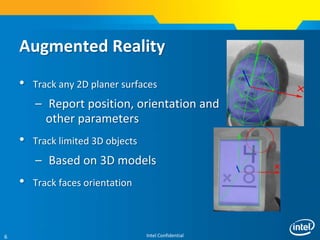
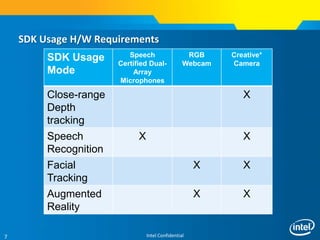
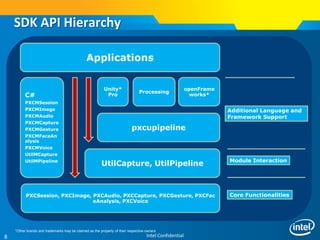
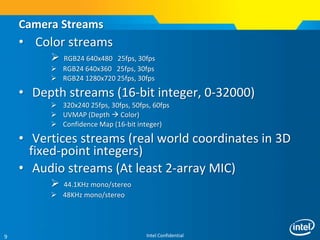
The document provides an overview of Intel's Perceptual Computing SDK capabilities including: 1) The SDK allows for perceptual computing including speech recognition, facial analysis, depth tracking, and augmented reality. It provides APIs for C++, C#, Unity and other frameworks. 2) The SDK enables capabilities like close-range finger tracking, facial tracking and analysis, voice recognition and synthesis, and augmented reality. It can retrieve data like images, geonodes, and gestures. 3) The document provides information on initializing and using the SDK within Unity including selecting capabilities, acquiring frames, retrieving image and gesture data, and cleaning up. It directs developers to additional resources for learning more.


![Natural User Interfaces Course - Class 2 [Augmented Reality]](https://cdn.slidesharecdn.com/ss_thumbnails/augmented-reality-111024073814-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)














































![[HACKATHON CISCO PARIS] Slideshow du workshop Smart City](https://cdn.slidesharecdn.com/ss_thumbnails/ciscoparisworkshopopeningslideshow-160325094835-thumbnail.jpg?width=640&height=640&fit=bounds)

![[Workshop e résidents] présentation intent, craft ai, dalkia et incubateur](https://cdn.slidesharecdn.com/ss_thumbnails/workshope-rsidentsprsentationintentcraftaidalkiaetincubateur-160202110412-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Webinar E-résidents #1] Présentation des différents métiers du bâtiment conn...](https://cdn.slidesharecdn.com/ss_thumbnails/prsentationpourlehackathon201601v2-160120114429-thumbnail.jpg?width=640&height=640&fit=bounds)
![[IoT World Forum Webinar] Review of CMX Cisco technology](https://cdn.slidesharecdn.com/ss_thumbnails/cmxtechnologiecisco-151204102222-lva1-app6891-thumbnail.jpg?width=640&height=640&fit=bounds)























