Post Flight Review (PFR) of Team Garuda at the International Student CanSat competition. Team Garuda secured International Rank 3 out of 40 Teams at the International Student CanSat Competition 2012 at Abilene, TX, USA. Visit http://www.rishidua.com/cansat/ for more information about the team.
We built Inverted Energy to be a facilitator in the global shift towards future mobility and energy storage.
With a mission to accelerate the world's transition to sustainable energy, we have developed commercially advanced clean energy technologies, promotion sustainability by working with organisations in building energy storage projects with innovative technologies to move India forward.
We aim to democratise energy access through innovation in energy storage technology. #GoBeyond the Ordinary
Post Flight Review (PFR) of Team Garuda at the International Student CanSat competition. Team Garuda secured International Rank 3 out of 40 Teams at the International Student CanSat Competition 2012 at Abilene, TX, USA. Visit http://www.rishidua.com/cansat/ for more information about the team.
We built Inverted Energy to be a facilitator in the global shift towards future mobility and energy storage.
With a mission to accelerate the world's transition to sustainable energy, we have developed commercially advanced clean energy technologies, promotion sustainability by working with organisations in building energy storage projects with innovative technologies to move India forward.
We aim to democratise energy access through innovation in energy storage technology. #GoBeyond the Ordinary
Murata SCC2000 Series X or Z-Axis Gyro & 3-Axis Accelerometer 2015 teardown r...Yole Developpement
Murata SCC2000 Series X or Z-Axis Gyro & 3-Axis Accelerometer
Automotive MEMS Combo
Murata’s Second Generation Combo Sensors for Automotive & Harsh Environments
Murata SCC2000 series sensors are combined accelerometer and gyroscope devices aimed at use in tough environments such as those encountered in automotive and industrial applications. The SCC2000 series has best in class temperature dependency, shock sensitivity and bias stability characteristics and consists of a low-g 3-axis accelerometer with two angular rate sensor options of either X or Z-axis detection.
The SCC2000 series features independent acceleration and angular rate sensing elements manufactured with Murata proprietary High Aspect Ratio (HAR) 3D-MEMS process and using SOI and cavity-SOI (c-SOI) substrates. A single ASIC produced with an advanced BCD process is used.
The acceleration sensing element consists of four acceleration sensitive masses and the angular rate sensing element consists of moving masses that are purposely exited to in-plane drive motion.
The SCC2000 devices are packaged in a SOIC 24-pin premolded plastic housing measuring 15.0x8.5x4.1mm. The combo sensor is compliant to the ISO26262 automotive safety standard and the AEC-Q100 stress test qualification requirements for electronic components used in automotive applications.
SCC2000 series is targeted for applications demanding high stability with tough environmental requirements. Typical applications include: IMUs for highly demanding environments, platform stabilization and control, machine control systems, Electronic Stability Control (ESC), Hill Start Assist (HSA), roll over detection and Navigation systems.
The report includes the analysis of all combo sensors in the SCC2000 series: the SCC2230-E02, SCC2230-D08 and SCC2130-D08. Also a comparison with previous generation SCC1300 series is included.
More information on that report at http://www.i-micronews.com/reports.html
Nanosat eye in the sky Astronomy Society of VictoriaMark Smith
This is a talk I gave to the astronomy society of victoria's instrument making section. They are a cluey bunch of people who have built an amazing 20 inch telescope, and I'm hoping to engage them on the nanosat eye in the sky project to put a telescope into space.
This project is concerned with the
design of SoC for detecting and correcting the error which may occur in the memory unit due to
radiation in LEO (Lower Earth Orbit) and due to stuck-at faults in memory unit in space station.
The error free data is feed to the predestined processor using the serial communication protocol
(UART) and perform its function specified in the data input which is sent from the ground station.
Fusex 2010-2011 : DETRONA (CLES-FACIL, INSA de Lyon)CLES-FACIL
Expériences principales :
Mesure des contraintes sur l’attache parachute par jauge de contrainte
Caméra auto-rotative dans un étage transparent
Localisation GPS & télémesure
Enchancing adoption of Open Source Libraries. A case study on Albumentations.AIVladimir Iglovikov, Ph.D.
Presented by Vladimir Iglovikov:
- https://www.linkedin.com/in/iglovikov/
- https://x.com/viglovikov
- https://www.instagram.com/ternaus/
This presentation delves into the journey of Albumentations.ai, a highly successful open-source library for data augmentation.
Created out of a necessity for superior performance in Kaggle competitions, Albumentations has grown to become a widely used tool among data scientists and machine learning practitioners.
This case study covers various aspects, including:
People: The contributors and community that have supported Albumentations.
Metrics: The success indicators such as downloads, daily active users, GitHub stars, and financial contributions.
Challenges: The hurdles in monetizing open-source projects and measuring user engagement.
Development Practices: Best practices for creating, maintaining, and scaling open-source libraries, including code hygiene, CI/CD, and fast iteration.
Community Building: Strategies for making adoption easy, iterating quickly, and fostering a vibrant, engaged community.
Marketing: Both online and offline marketing tactics, focusing on real, impactful interactions and collaborations.
Mental Health: Maintaining balance and not feeling pressured by user demands.
Key insights include the importance of automation, making the adoption process seamless, and leveraging offline interactions for marketing. The presentation also emphasizes the need for continuous small improvements and building a friendly, inclusive community that contributes to the project's growth.
Vladimir Iglovikov brings his extensive experience as a Kaggle Grandmaster, ex-Staff ML Engineer at Lyft, sharing valuable lessons and practical advice for anyone looking to enhance the adoption of their open-source projects.
Explore more about Albumentations and join the community at:
GitHub: https://github.com/albumentations-team/albumentations
Website: https://albumentations.ai/
LinkedIn: https://www.linkedin.com/company/100504475
Twitter: https://x.com/albumentations
Why You Should Replace Windows 11 with Nitrux Linux 3.5.0 for enhanced perfor...SOFTTECHHUB
The choice of an operating system plays a pivotal role in shaping our computing experience. For decades, Microsoft's Windows has dominated the market, offering a familiar and widely adopted platform for personal and professional use. However, as technological advancements continue to push the boundaries of innovation, alternative operating systems have emerged, challenging the status quo and offering users a fresh perspective on computing.
One such alternative that has garnered significant attention and acclaim is Nitrux Linux 3.5.0, a sleek, powerful, and user-friendly Linux distribution that promises to redefine the way we interact with our devices. With its focus on performance, security, and customization, Nitrux Linux presents a compelling case for those seeking to break free from the constraints of proprietary software and embrace the freedom and flexibility of open-source computing.
In his public lecture, Christian Timmerer provides insights into the fascinating history of video streaming, starting from its humble beginnings before YouTube to the groundbreaking technologies that now dominate platforms like Netflix and ORF ON. Timmerer also presents provocative contributions of his own that have significantly influenced the industry. He concludes by looking at future challenges and invites the audience to join in a discussion.
A tale of scale & speed: How the US Navy is enabling software delivery from l...sonjaschweigert1
Rapid and secure feature delivery is a goal across every application team and every branch of the DoD. The Navy’s DevSecOps platform, Party Barge, has achieved:
- Reduction in onboarding time from 5 weeks to 1 day
- Improved developer experience and productivity through actionable findings and reduction of false positives
- Maintenance of superior security standards and inherent policy enforcement with Authorization to Operate (ATO)
Development teams can ship efficiently and ensure applications are cyber ready for Navy Authorizing Officials (AOs). In this webinar, Sigma Defense and Anchore will give attendees a look behind the scenes and demo secure pipeline automation and security artifacts that speed up application ATO and time to production.
We will cover:
- How to remove silos in DevSecOps
- How to build efficient development pipeline roles and component templates
- How to deliver security artifacts that matter for ATO’s (SBOMs, vulnerability reports, and policy evidence)
- How to streamline operations with automated policy checks on container images
Securing your Kubernetes cluster_ a step-by-step guide to success !KatiaHIMEUR1
Today, after several years of existence, an extremely active community and an ultra-dynamic ecosystem, Kubernetes has established itself as the de facto standard in container orchestration. Thanks to a wide range of managed services, it has never been so easy to set up a ready-to-use Kubernetes cluster.
However, this ease of use means that the subject of security in Kubernetes is often left for later, or even neglected. This exposes companies to significant risks.
In this talk, I'll show you step-by-step how to secure your Kubernetes cluster for greater peace of mind and reliability.
Goodbye Windows 11: Make Way for Nitrux Linux 3.5.0!SOFTTECHHUB
As the digital landscape continually evolves, operating systems play a critical role in shaping user experiences and productivity. The launch of Nitrux Linux 3.5.0 marks a significant milestone, offering a robust alternative to traditional systems such as Windows 11. This article delves into the essence of Nitrux Linux 3.5.0, exploring its unique features, advantages, and how it stands as a compelling choice for both casual users and tech enthusiasts.
Maruthi Prithivirajan, Head of ASEAN & IN Solution Architecture, Neo4j
Get an inside look at the latest Neo4j innovations that enable relationship-driven intelligence at scale. Learn more about the newest cloud integrations and product enhancements that make Neo4j an essential choice for developers building apps with interconnected data and generative AI.
Sudheer Mechineni, Head of Application Frameworks, Standard Chartered Bank
Discover how Standard Chartered Bank harnessed the power of Neo4j to transform complex data access challenges into a dynamic, scalable graph database solution. This keynote will cover their journey from initial adoption to deploying a fully automated, enterprise-grade causal cluster, highlighting key strategies for modelling organisational changes and ensuring robust disaster recovery. Learn how these innovations have not only enhanced Standard Chartered Bank’s data infrastructure but also positioned them as pioneers in the banking sector’s adoption of graph technology.
Observability Concepts EVERY Developer Should Know -- DeveloperWeek Europe.pdfPaige Cruz
Monitoring and observability aren’t traditionally found in software curriculums and many of us cobble this knowledge together from whatever vendor or ecosystem we were first introduced to and whatever is a part of your current company’s observability stack.
While the dev and ops silo continues to crumble….many organizations still relegate monitoring & observability as the purview of ops, infra and SRE teams. This is a mistake - achieving a highly observable system requires collaboration up and down the stack.
I, a former op, would like to extend an invitation to all application developers to join the observability party will share these foundational concepts to build on:
Removing Uninteresting Bytes in Software FuzzingAftab Hussain
Imagine a world where software fuzzing, the process of mutating bytes in test seeds to uncover hidden and erroneous program behaviors, becomes faster and more effective. A lot depends on the initial seeds, which can significantly dictate the trajectory of a fuzzing campaign, particularly in terms of how long it takes to uncover interesting behaviour in your code. We introduce DIAR, a technique designed to speedup fuzzing campaigns by pinpointing and eliminating those uninteresting bytes in the seeds. Picture this: instead of wasting valuable resources on meaningless mutations in large, bloated seeds, DIAR removes the unnecessary bytes, streamlining the entire process.
In this work, we equipped AFL, a popular fuzzer, with DIAR and examined two critical Linux libraries -- Libxml's xmllint, a tool for parsing xml documents, and Binutil's readelf, an essential debugging and security analysis command-line tool used to display detailed information about ELF (Executable and Linkable Format). Our preliminary results show that AFL+DIAR does not only discover new paths more quickly but also achieves higher coverage overall. This work thus showcases how starting with lean and optimized seeds can lead to faster, more comprehensive fuzzing campaigns -- and DIAR helps you find such seeds.
- These are slides of the talk given at IEEE International Conference on Software Testing Verification and Validation Workshop, ICSTW 2022.
DevOps and Testing slides at DASA ConnectKari Kakkonen
My and Rik Marselis slides at 30.5.2024 DASA Connect conference. We discuss about what is testing, then what is agile testing and finally what is Testing in DevOps. Finally we had lovely workshop with the participants trying to find out different ways to think about quality and testing in different parts of the DevOps infinity loop.
UiPath Test Automation using UiPath Test Suite series, part 6DianaGray10
Welcome to UiPath Test Automation using UiPath Test Suite series part 6. In this session, we will cover Test Automation with generative AI and Open AI.
UiPath Test Automation with generative AI and Open AI webinar offers an in-depth exploration of leveraging cutting-edge technologies for test automation within the UiPath platform. Attendees will delve into the integration of generative AI, a test automation solution, with Open AI advanced natural language processing capabilities.
Throughout the session, participants will discover how this synergy empowers testers to automate repetitive tasks, enhance testing accuracy, and expedite the software testing life cycle. Topics covered include the seamless integration process, practical use cases, and the benefits of harnessing AI-driven automation for UiPath testing initiatives. By attending this webinar, testers, and automation professionals can gain valuable insights into harnessing the power of AI to optimize their test automation workflows within the UiPath ecosystem, ultimately driving efficiency and quality in software development processes.
What will you get from this session?
1. Insights into integrating generative AI.
2. Understanding how this integration enhances test automation within the UiPath platform
3. Practical demonstrations
4. Exploration of real-world use cases illustrating the benefits of AI-driven test automation for UiPath
Topics covered:
What is generative AI
Test Automation with generative AI and Open AI.
UiPath integration with generative AI
Speaker:
Deepak Rai, Automation Practice Lead, Boundaryless Group and UiPath MVP
Generative AI Deep Dive: Advancing from Proof of Concept to ProductionAggregage
Join Maher Hanafi, VP of Engineering at Betterworks, in this new session where he'll share a practical framework to transform Gen AI prototypes into impactful products! He'll delve into the complexities of data collection and management, model selection and optimization, and ensuring security, scalability, and responsible use.
In the rapidly evolving landscape of technologies, XML continues to play a vital role in structuring, storing, and transporting data across diverse systems. The recent advancements in artificial intelligence (AI) present new methodologies for enhancing XML development workflows, introducing efficiency, automation, and intelligent capabilities. This presentation will outline the scope and perspective of utilizing AI in XML development. The potential benefits and the possible pitfalls will be highlighted, providing a balanced view of the subject.
We will explore the capabilities of AI in understanding XML markup languages and autonomously creating structured XML content. Additionally, we will examine the capacity of AI to enrich plain text with appropriate XML markup. Practical examples and methodological guidelines will be provided to elucidate how AI can be effectively prompted to interpret and generate accurate XML markup.
Further emphasis will be placed on the role of AI in developing XSLT, or schemas such as XSD and Schematron. We will address the techniques and strategies adopted to create prompts for generating code, explaining code, or refactoring the code, and the results achieved.
The discussion will extend to how AI can be used to transform XML content. In particular, the focus will be on the use of AI XPath extension functions in XSLT, Schematron, Schematron Quick Fixes, or for XML content refactoring.
The presentation aims to deliver a comprehensive overview of AI usage in XML development, providing attendees with the necessary knowledge to make informed decisions. Whether you’re at the early stages of adopting AI or considering integrating it in advanced XML development, this presentation will cover all levels of expertise.
By highlighting the potential advantages and challenges of integrating AI with XML development tools and languages, the presentation seeks to inspire thoughtful conversation around the future of XML development. We’ll not only delve into the technical aspects of AI-powered XML development but also discuss practical implications and possible future directions.
Essentials of Automations: The Art of Triggers and Actions in FMESafe Software
In this second installment of our Essentials of Automations webinar series, we’ll explore the landscape of triggers and actions, guiding you through the nuances of authoring and adapting workspaces for seamless automations. Gain an understanding of the full spectrum of triggers and actions available in FME, empowering you to enhance your workspaces for efficient automation.
We’ll kick things off by showcasing the most commonly used event-based triggers, introducing you to various automation workflows like manual triggers, schedules, directory watchers, and more. Plus, see how these elements play out in real scenarios.
Whether you’re tweaking your current setup or building from the ground up, this session will arm you with the tools and insights needed to transform your FME usage into a powerhouse of productivity. Join us to discover effective strategies that simplify complex processes, enhancing your productivity and transforming your data management practices with FME. Let’s turn complexity into clarity and make your workspaces work wonders!
zkStudyClub - Reef: Fast Succinct Non-Interactive Zero-Knowledge Regex ProofsAlex Pruden
This paper presents Reef, a system for generating publicly verifiable succinct non-interactive zero-knowledge proofs that a committed document matches or does not match a regular expression. We describe applications such as proving the strength of passwords, the provenance of email despite redactions, the validity of oblivious DNS queries, and the existence of mutations in DNA. Reef supports the Perl Compatible Regular Expression syntax, including wildcards, alternation, ranges, capture groups, Kleene star, negations, and lookarounds. Reef introduces a new type of automata, Skipping Alternating Finite Automata (SAFA), that skips irrelevant parts of a document when producing proofs without undermining soundness, and instantiates SAFA with a lookup argument. Our experimental evaluation confirms that Reef can generate proofs for documents with 32M characters; the proofs are small and cheap to verify (under a second).
Paper: https://eprint.iacr.org/2023/1886
zkStudyClub - Reef: Fast Succinct Non-Interactive Zero-Knowledge Regex Proofs
PDR : 2nd International CanSat Competition - Spain, 2010 (CLES-FACIL)
1. PDR – Preliminary Design Review
Project Altair – CLES FACIL
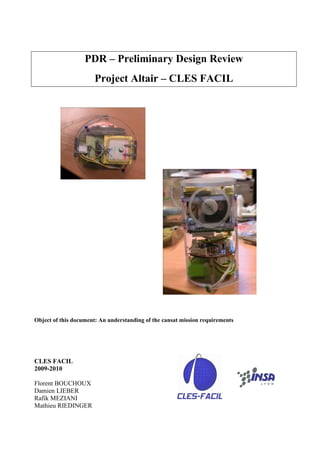
Object of this document: An understanding of the cansat mission requirements
CLES FACIL
2009-2010
Florent BOUCHOUX
Damien LIEBER
Rafik MEZIANI
Mathieu RIEDINGER
2. PDR – Preliminary Design Review
Summary
A. Introduction ................................................................................................................................... 3
1. Team members ...................................................................................................................................... 3
2. Mission objectives.................................................................................................................................. 4
B. Cansat Subsystems ......................................................................................................................... 5
3. Structure ................................................................................................................................................ 5
a. Mass Budget....................................................................................................................................... 6
4. Recovery Subsystem .............................................................................................................................. 6
5. Electrical Subsystem .............................................................................................................................. 8
6. Communication Subsystem ................................................................................................................... 9
7. Flight Software ....................................................................................................................................... 9
8. Ground Support Equipment (GSE) ....................................................................................................... 10
9. Dangerous and Harmful material ........................................................................................................ 11
C. Test & Certification Campaign (DAMIEN RAFIK MATHIEU pb: on a encore rien fait) Erreur ! Signet non
défini.
D. Operations ....................................................................................................................................12
10. Mission timeline............................................................................................................................... 12
11. Data Analysis .................................................................................................................................... 12
E. Cost Estimation .............................................................................................................................13
F. Schedules ......................................................................................................................................14
CLES FACIL page 2 of 14 02/21/2010
3. PDR – Preliminary Design Review
A. Introduction
1. Team members
This year, the CLES FACIL will be proud to present to you his fourth Cansat, Altair. This Cansat is
our second in the International Class. Its predecessor, Yoda, made many nominal flights, but had problems
which had to be solved. Altair is also an update, fixing all the previous problems we met in our last four
Cansat experience years. We were many to register to the International Competition last year. The team has
evolved, and is now constituted by:
- Florent Bouchoux, Project Manager
Florent.bouchoux@insa-lyon.fr
22 years old, Engineer-Student in the fourth year in the Electrical Department of the INSA
Lyon (France)
- Mathieu Riedinger
Mathieu.riedinger@insa-lyon.fr
21 years old, Engineer-Student in the third year in the Electrical Department of the INSA
Lyon (France)
- Damien Lieber
Damien.lieber@insa-lyon.fr
20 years old, Engineer-Student in the second year of preparatory class in the INSA of Lyon
(France)
We have an external support represented by:
- Rafik Meziani
Rafik.meziani@cpe.fr
35 years old, engineering process technician, working by CPE Lyon, Engineer school
We all four will be present to the Cansat Competition in Madrid from the 8th to 11th of April, 2010.
CLES FACIL page 3 of 14 02/21/2010
4. PDR – Preliminary Design Review
2. Mission objectives
Chosen category: Come Back
Modality: 350grams Cansat, International Class
Our Cansat will be launched from an experimental rocket. During its flight, it will have to use its
components to control the wing it is flying under, in order to land on a precise point on the ground. During
the whole mission, that is to say right before the rocket’s launch, the Cansat will be autonomous. No direct or
indirect action (using telemetry) will be performed by the team during the flight.
Before the launch, the target GPS coordinates will be sent using an uplink telemetry to the Cansat, so
that it will be able to drive its parafoil to the target. The direction is modified by two servomotors. That
allows us to turn right or left and to go faster (by pulling both of the direction lines). All the GPS data is
managed by an ATXMEGA microcontroller, and then sent to our homemade telemetry ground station.
During the flight, the Cansat will continuously be sending position, temperature, pressure, as well as
batteries state information. When ejected, a jack cable, attached to the rocket’s body, will disconnect and
enable the trajectory calculation. The direction wheels are allowed to move after the parafoil has entirely
deployed. The GPS data then allow the microcontroller to calculate the path of the Cansat and its moves (due
to atmospheric conditions, wind...), in order to reach the predefined target on the ground.
See schedule: flight diagram
CLES FACIL page 4 of 14 02/21/2010
5. PDR – Preliminary Design Review
B. Cansat Subsystems
1. Structure
The structure is composed of transparent Plexiglas, which assures weightlessness, strength and
design. There are no protruding parts to be declared.
The main structure dimensions are: diameter 66mm, height 115mm.
Structure composition:
GPS
2 servomotors + direction wheels
radio
µC chip
batteries
CLES FACIL page 5 of 14 02/21/2010
6. PDR – Preliminary Design Review
a. Mass Budget
Designation Reference Mass
Mechanics 167.75 grams
- Structure (all) Homemade 76.8 grams
- Case Homemade 12.5 grams
- Screw farnell 12 grams
- Wheels (x2) Homemade 22.65 grams
- Servomotors (x2) Hitec 43.8 grams
Electronics 135.4 grams
- GPS SiRF III GPS 21.5 grams
- Radio HAC-LN-433 from HAC-TECH 15.1 grams
- Pressure sensor MS-5534 (Selectronic) 21.8 grams
- Microcontroller chip ATXMEGA 128A1 25 grams
- Batteries Li-Po 1000mAh 2S 15C – Protronik 52 grams
Dimensions: 53 x 30 x 16 mm
TOTAL MASS ( < 350 grams) 303.15 grams
See schedule file: radio datasheet
2. Recovery Subsystem
- Chosen system: parafoil wing
Main parafoil wing dimensions: 1400x600mm
The Cansat is hanging up under a parafoil wing, which enables us to control the path of the module.
The wing is tied to the Cansat with two main lines (fastening lines). Two other thinner lines allow changing
the direction (direction lines). The microcontroller sends orders to two servomotors. On each servomotor is
fixed a wheel, on which direction lines are attached. It enables to pull or release the line. That permits to go
straight, right, left and faster (by pulling both of the direction lines at the same time, because each line is
independent). That allows us to have high manoeuvrability, to forecast and react to different atmospheric
conditions (wind, heat, air pockets...).
CLES FACIL page 6 of 14 02/21/2010
7. PDR – Preliminary Design Review
- Tests
The Cles Facil team is currently performing tests on his Cansat. We will resume some of the aspects of the
tests in this document, but the CDR will be more detailed.
The tests are divided in different steps:
1. Wing tests: the Cansat is thrown from a building (25 meters high), containing all of his components,
but completely inert. The main goal of this test is to obtain a straight flight, when there is no wind.
After this test, we are sure the parafoil is ideally positioned and fixed to the module.
The same tests are then made with bad weather. Finally, we test and choose a wing folding, so it will
be in the RCB. At this point, the wing is correctly integrated to the Cansat.
2. Flight tests: in order to check or direction system, we drive the Cansat with our GSE Joystick (drive
algorithm disabled). That allows us to look if the Cansat is acting like we want him to, with enough
speed and in the good conditions.
3. Ejection and parafoil opening tests: the Cansat is thrown from a higher place (small RF helicopter,
parachutist plane...). The goal of this test is to see if the wing opens and stabilises when thrown with
an initial speed.
4. Algorithm test: thrown from a RF helicopter (~100m high), we check the flight algorithm.
5. The final launch test is performed from a plane, with the algorithm. We also can check all the
sequences of the flight and correct the final problems.
- Parafoil in the Rocket Cargo Bay
During the tests, we have chosen a wing folding, which enables fast deployment and stabilisation of the
parafoil. In order to keep the parafoil folded like expected, we added an intermediate flexible part, in which
the wing will be imprisoned. This part will also serve to keep the lines separated, once the wing has fully
opened.
CLES FACIL page 7 of 14 02/21/2010
8. PDR – Preliminary Design Review
This part is actually a prototype and will be detailed in the CDR with the final version of the hanging.
3. Electrical Subsystem
- Elements of the electrical subsystem
- Diagram of the components’ interconnections
Batterie
(2)
(3) (3)
GPS
Servomotor 1
Temperature (2) µC chip
sensor (NTC) Servomotor 2
(3)
(4) ATXMEGA128
Pressure
sensor
A1
Connectors:
- ON/OFF
- Ejection
- JTAG (programming)
(6)
radio (x) : number of wires
CLES FACIL page 8 of 14 02/21/2010
9. PDR – Preliminary Design Review
- Estimation of the power consumption – foreseen duration of the batteries (must be at least 1h
power supply for all the equipments): the total current consumption is approximately 750mA.
This consumption strongly depends on which subsystems are activated, for example disabling
the radio transmitter considerably reduces the consumption.
- List description of the main components selected
o GPS: gives the latitude, longitude and altitude of the module. It enables to locate the
Cansat in the air, and to calculate its trajectory.
o Temperature sensor: a NTC directly connected to the µC ADC gives us the
temperature around the Cansat
o Pressure sensor: gives a temperature compensated pressure. This data enables us, after
conversion, to know precisely the Cansat’s altitude.
o Radio module: this bidirectional radio module can be used as well for data transmission
or reception (the same modules are used aboard the Cansat and in the ground station).
o Servomotors: the servomotors enable us to precisely know the angle of the wheel and
its position, in order to have a perfectly controlled trajectory.
o Microcontroller chip: the µC used and included in the Cansat structure is an AtXmega
128A microcontroller from ATMEL. This 16-bit microcontroller allows us to execute a
consequent program, processing data from the sensors, and compute the flight algorithm.
This chip is the brain of the Cansat; it registers sensors data, controls the servomotors
and communicates with the ground station via the radio.
4. Communication Subsystem
- Frequency used for data transmission/reception between the Cansat and the Ground Station:
o 433.694 MHz (downlink and uplink)
- Maximum emission level (W)
o 500 mW
- Maximum bandwidth (-6dB)
o 25kHz
- Transmission protocol
o GFSK modulation + proprietary protocol
5. Flight Software
- Flight software algorithm and programming language
The flight algorithm is implemented onboard the Cansat µC in the C language.
CLES FACIL page 9 of 14 02/21/2010
10. PDR – Preliminary Design Review
The main lines of the algorithm program are following:
- if there is not enough or just the time to reach the target : straight flight to the landing point
- if there is much time to reach the aim : following a virtual circle trajectory around the landing point,
aka “Eagle Flight”.
The two servomotors enable us to react to unforeseen weather inconveniences: heat holes, fast winds, etc.
With the direction (turning right or left), we will be able to go faster by pulling on both lines or by releasing
them in the same time.
- Total amount of data to be stored on the Cansat during the mission
During the mission, there is no data stored onboard the Cansat.
All the data is transmitted to the GSE with a radio downlink in real-time.
A proprietary frame is sent in real time to the GSE:
- Raw data collected by the sensors:
o GPS data: all the data is decoded onboard the Cansat, then sent to the GSE and used to
calculate the trajectory.
o Temperature sensor: all the data is collected by the µC’s ADC and then sent to the GSE
by radio.
o Pressure sensor: the sensor gives us directly the digital pressure.
6. Ground Support Equipment (GSE)
The GSE has entirely been developed by the Cles Facil. All the components are settled in a military-like
case. The main components are the following:
o Radio module: the same module as in the Cansat receives the sensors data (RX only
during the flight) and sends orders given by joystick (used only during the test phase,
disabled during the contest).
o A laptop computer: during the Cansat flight, it receives all the sensor data and saves it,
in order to directly draw graphs, in order to have directly readable results. That allows us
to verify the data correctness and magnitude in real time, during the flight. During the
test phase, a joystick is connected, in order to control the Cansat from the ground and to
test its flight possibilities.
The GSE is an autonomous system, all packed in a military-like case. It uses a proprietary
technology developed for previous projects, including sounding rockets. It is quite complex in its
CLES FACIL page 10 of 14 02/21/2010
11. PDR – Preliminary Design Review
conception, as it can be used for many projects. It includes a high-capacity battery that allows a
complete autonomy above 5h of working.
7. Dangerous and Harmful material
No specifications for this section in our project.
CLES FACIL page 11 of 14 02/21/2010
12. PDR – Preliminary Design Review
C. Operations
- 11/01 to 12/31: definition of the project and conception, preliminary design, purchase of the main
parts (mechanical and electrical parts)
- 01/01 to 02/28: first structure and integration prototype built, development of the flight algorithm
- 03/01 to the competition date: tests in flight conditions
1. Mission timeline
We are currently developing this part of the project, which depends of the flight tests. A foreseen timeline for
the Launch day will be sketched, specifying the role of each team member during the CanSat preparation,
integration, GSE setup, operation and recovery in the CDR.
2. Data Analysis
Idem for this part of the project, in parallel to the tests, we develop our GSE software, that will enable to
have direct data during the flight. This part will be developed in the CDR.
CLES FACIL page 12 of 14 02/21/2010