Downloaded 10 times

![2. E(x′
itci) = 0
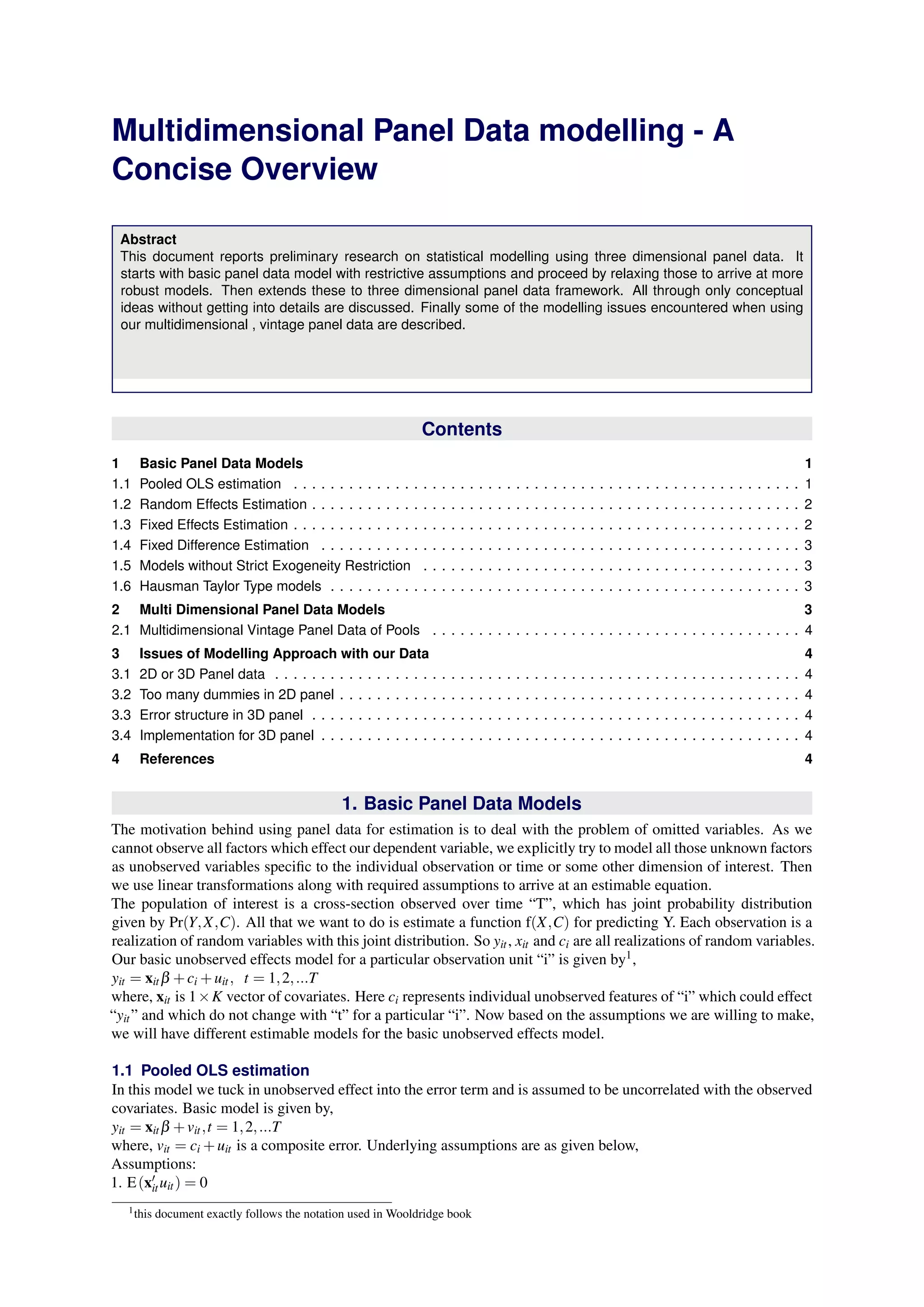
First assumption is true by definition if we have correctly specified the conditional expectation function. This is
also called no contemporaneous correlation assumption. Second assumption is rather restrictive. Under these as-sumptions
we can just use pooled OLS estimation i.e., looking at observations as pooled across “i” and “t”. But due
to serial correlation in “vit” (which is because of ci), we have to use robust Var-Cov matrix estimator for inference.
1.2 Random Effects Estimation
In this model also we put “ci” into the error term but we explicitly assume an error structure accounting for the un-observed
component and more restrictive assumption of strict exogeneity so that we can use GLS (generalized least squares)
estimation approach. Thus resulting in more efficient estimates. First assumption in this model is,
R.E Assumption 1:
a. E(uit |xi;ci) = 0; t = 1;2; :::T
b. E(ci|xi) = 0
where xi is (xi1;xi2; :::xiT ). First part is the strict exogeneity assumption i.e., any of the covariates are not corre-lated
with error at any “t”. Second part of the assumption is what restricts random effects model when compared to
β
other models, →it assumes orthogonality between unobserved effect and observable covariates. Our model is given
by,
yit = xitβ +vit ; t = 1;2; :::T
where, vit = ci+uit is a composite error.
This in −turn can be written in vector form for each individual as,
yi = Xi
+vi
where yi, vi are vectors and Ω = E(viv′
i) is the Var-Cov matrix of the error term which is same for each individual.
Additional assumptions required for the estimation and inference are as given below,
R.E Assumption 2:
Rank[E(X′
iΩXi)] = K
This is standard no-perfect collinearity assumption.
R.E Assumption 3:
a. E(uiu′
i
|xi;ci) =σ 2
u IT
b. E
(
c2i
|Xi
)
=σ 2
c
Assuming particular error structure of no-correlation across time periods and constant variance for unobservables
and error, we get the random effects error structure given by,
Ω = E(viv′
i) =
σ 2
c +σ 2
u σ 2
c
· · · σ 2
c
σ 2
c σ 2
c +σu · · · σ 2
c
...
...
. . .
...
σ 2
c : · · · σ 2
c +σ 2
u
Finally random effects estimate of β is given by(this is same projection formula used in normal regression extended to vectors);
ˆβ
RE =
(
ΣNi
iΩˆ −1Xi
=1X′
)−1 (
=1X′
ΣNi
i Ωˆ −1Yi
)
where, Ωˆ −1 is obtained by estimating σˆv
2 and σˆc
2.
If we don’t want to make assumptions about error structure, we can use robust variance matrix for inference.
A more general estimator of Ω can be used in FGLS framework with,
Ωˆ = N−1ΣNi
=1
ˆˆV
i
ˆˆV
′
i
where, ˆˆV
i is pooled OLS residual.
1.3 Fixed Effects Estimation
Random effects estimation puts “ci” into the error term and then assumes no correlation between unobservable
and observable covariates. But the whole point of panel data is to allow for “ci” to be arbitrarily correlated with
the xit . Fixed effects analysis achieves this purpose explicitly.
Basic model is given by,
yi = Xiβ +cijT +ui, for some observation i.
F.E Assumption 1:
E(uit |xi;ci) = 0; t = 1;2; :::T
where xi is (xi1;xi2; :::xiT ).](https://image.slidesharecdn.com/paneldataestimationpreliminaryresearch-140923085419-phpapp02/85/Priliminary-Research-on-Multi-Dimensional-Panel-Data-Modeling-2-320.jpg)
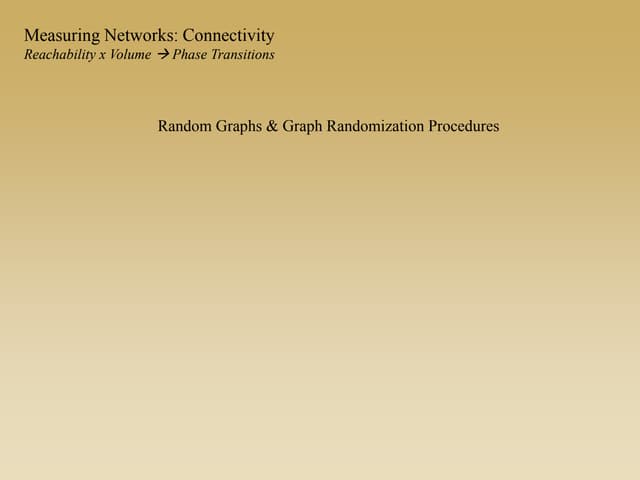
![This is strict exogeneity assumption and we don’t put any restriction on the correlation betweeen unobservable
and observable covariates. Note that we can’t have time invariant covariates because we can’t distinguish its effect
from that of ci.
The idea of estimating “β ” is to transform the equation to eliminate “ci”. As the linear transformation doesn’t
change the statistical properties of unbiasedness and consistency of “β ”, the resulting estimates have the same
properties as original model.
The famous within transformation is given by,
(yit − ¯ yi) = (xit − ¯ xi)β +(uit − ¯ ui)
where ¯ yi = T−1ΣTi
=1 yit ; ¯ xi = T−1ΣTi
=1 xit and ¯ ui = T−1ΣTi
=1 uit .
or
¨yit = ¨xitβ + ¨uit
Here we can show that E(¨x′
it ¨uit ) = 0; t = 1;2; :::T holds and so can use pooled ols estimation to get “ˆβ
FE”. Thus
we have pooled [
(
OLS regression of yit ¨ on xit ¨ , t = 1;2; :::N:With an additional assumption of no perfect collinearity
i.e., rank
E
¨X
′
i ¨X
i
)]
= K, fixed effect estimate of β is given by,
ˆβ
FE =
(
ΣNi
=1 ¨X
′
i ¨X
i
)−1 (
=1 ¨X
ΣNi
′
i ¨Y
i
)
For inference we assume homoskedastic error structure for each i across time series dimension. And if we suspect
serial correlation we can use robust Var-Cov matrix for inference. If we choose not to assume any error structure
then feasible GLS estimator can be directly used to get efficient estimator2.
1.4 Fixed Difference Estimation
If we want to assume that errors across “T” follow random walk, then F.D is more palatable . The analysis and
assumptions are very similar to that of F.E estimation. All the assumptions of strict exogeneity, rank condition for
no-perfect collinearity and error structure for inference are all valid for this case also.
1.5 Models without Strict Exogeneity Restriction
So far we have assumed strict exogeneity of explanatory variables conditional on unobserved effects (in case of
F.E and F.D). This rules out the feedback from yit to future values of xit . Generally R.E, F.E and F.D estimates are
inconsistent if the explanatory variables in some time period is correlated with uit . While the size of inconsistency
might be small in some cases it can be substantial in others. Thus it is important to deduce consistent estimates
when this assumption is relaxed. To be specific we assume that xit are sequentially exogenous conditional on the
unobserved effect i.e.,
E(uit |xit ;xit−1; :::xi1;ci) = o , t = 1,2,...T.
This implies that no past values of xit affect the expected value of yit once xit and ci are accounted for. Thus we
are allowing for correlation between uit and future values of xit . These models can be estimated using suitable
instruments in the transformed equation( whether it is fixed difference or fixed effects).
1.6 Hausman Taylor Type models
When we want to include time-invariant factors and also allow for arbitrary correlation between unobserved factor
and observable covariates we use H.T type models. Basic idea here is to find suitable instruments and use GMM
to estimate the parameters of the model.
2. Multi Dimensional Panel Data Models
In basic Panel data, data is observed over two dimensions( typically, time and cross-section). A multidimensional
panel data has observations uniquely identified with one or more indexes apart from the usual time and cross-section.
As an example, consider three-way trade panel data. Each observation is a trade deal of a country from
a cross-section of countries at a particular time with a particular country. An observation has both dependent
variable and many independent variables. Many interesting fixed effects can be modelled with multidimensional
panel data. For example,
yi jt = xi jtβ +ci+djt +εi jt
With suitable transformations and assumptions about errors across different dimensions. we can arrive at estimates
of parameters as we do it in two dimensional panel.
2Please refer Econometric analysis of cross-section and Panel data by Wooldridge for further details](https://image.slidesharecdn.com/paneldataestimationpreliminaryresearch-140923085419-phpapp02/85/Priliminary-Research-on-Multi-Dimensional-Panel-Data-Modeling-3-320.jpg)


This document provides an overview of statistical modelling using multidimensional panel data. It begins by discussing basic panel data models that make restrictive assumptions, then relaxes those assumptions to develop more robust models. It extends basic models to a three-dimensional panel data framework. Finally, it describes some modelling issues that arise when using multidimensional vintage panel data, specifically relating to whether a two-dimensional or three-dimensional approach is best, dealing with too many dummy variables in a two-dimensional model, specifying the error structure in a three-dimensional model, and implementing estimation for a three-dimensional panel model.















































![谷歌留痕技术 [ 𝙩𝙤𝙥 𝟮𝟯𝟯. 𝙘 𝙤𝙢 ]](https://cdn.slidesharecdn.com/ss_thumbnails/top233-260130174328-3833018c-thumbnail.jpg?width=640&height=640&fit=bounds)









