The document discusses a TCP echo client-server program. It includes:
1. An overview of how the client reads input, writes it to the server, and the server echoes it back to the client.
2. Descriptions of the echo server and client code, including the main and processing functions.
3. Explanations of normal startup and termination when the client exits gracefully, as well as error handling for events like the server crashing or disconnecting.
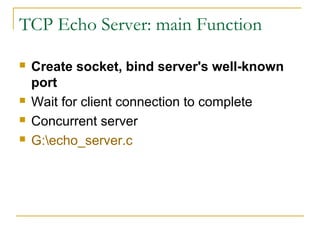
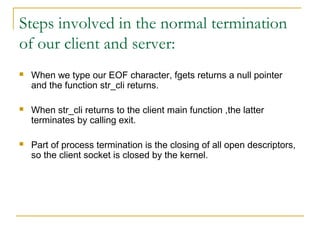
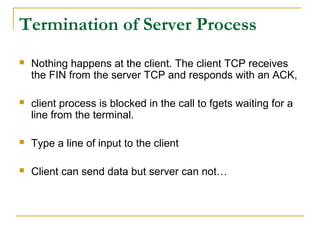
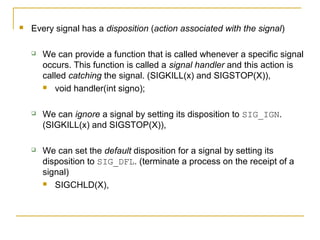
![TCP Echo Server: str_echo Function
Read a buffer and echo the buffer
str_echo function: echoes data on a socket
#include "unp.h"
void str_echo(int sockfd)
{ ssize_t n;
char buf[MAXLINE];
again:
while ( (n = read(sockfd, buf, MAXLINE)) > 0)
Writen(sockfd, buf, n);
if (n < 0 && errno == EINTR)
goto again;
else if (n < 0)
err_sys("str_echo: read error");
}](https://image.slidesharecdn.com/npunitiii-121101013311-phpapp02/85/Np-unit-iii-4-320.jpg)
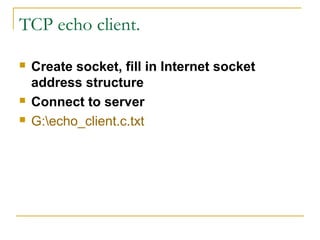
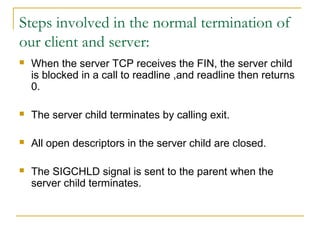
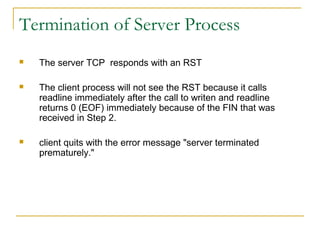
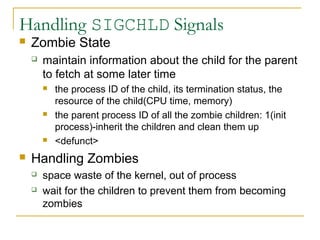
![str_cli function: client processing loop.
#include "unp.h"
void str_cli(FILE *fp, int sockfd)
{ char sendline[MAXLINE], recvline[MAXLINE];
while (Fgets(sendline, MAXLINE, fp) != NULL)
{
Writen(sockfd, sendline, strlen (sendline));
if (Readline(sockfd, recvline, MAXLINE) == 0)
err_quit("str_cli: server terminated prematurely");
Fputs(recvline, stdout);
}
}](https://image.slidesharecdn.com/npunitiii-121101013311-phpapp02/85/Np-unit-iii-7-320.jpg)




![XPDDS19: [ARM] OP-TEE Mediator in Xen - Volodymyr Babchuk, EPAM Systems](https://cdn.slidesharecdn.com/ss_thumbnails/xendevsummit2019-babchuk-op-tee-190812095541-thumbnail.jpg?width=640&height=640&fit=bounds)