1-1. Cloud Controllerと
Serviceのやり取り
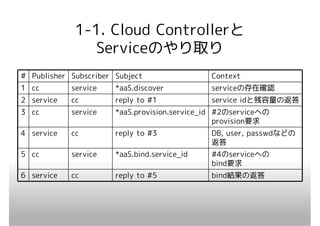
# Publisher Subscriber Subject Context
1 cc service *aaS.discover serviceの存在確認
2 service cc reply to #1 service idと残容量の返答
3 cc service *aaS.provision.service_id #2のserviceへの
provision要求
4 service cc reply to #3 DB, user, passwdなどの
返答
5 cc service *aaS.bind.service_id #4のserviceへの
bind要求
6 service cc reply to #5 bind結果の返答
13.
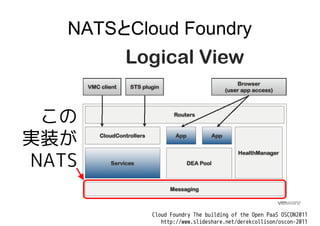
NATSとCloud Foundry(2)
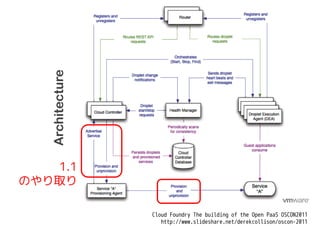
1.1
のやり取り
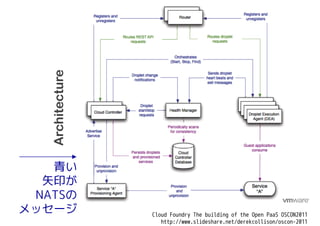
Cloud Foundry The building of the Open PaaS OSCON2011
http://www.slideshare.net/derekcollison/oscon-2011
14.
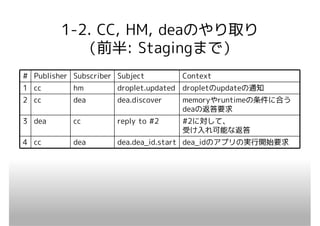
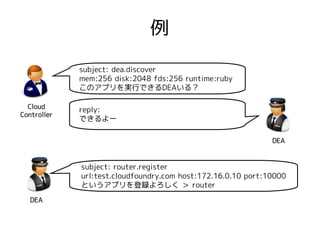
1-2. CC, HM,deaのやり取り
(前半: Stagingまで)
# Publisher Subscriber Subject Context
1 cc hm droplet.updated dropletのupdateの通知
2 cc dea dea.discover memoryやruntimeの条件に合う
deaの返答要求
3 dea cc reply to #2 #2に対して、
受け入れ可能な返答
4 cc dea dea.dea_id.start dea_idのアプリの実行開始要求
15.
NATSとCloud Foundry(2)
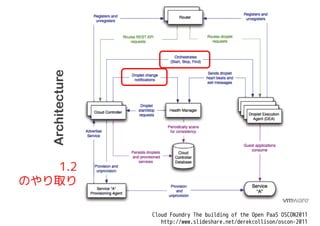
1.2
のやり取り
Cloud Foundry The building of the Open PaaS OSCON2011
http://www.slideshare.net/derekcollison/oscon-2011
16.
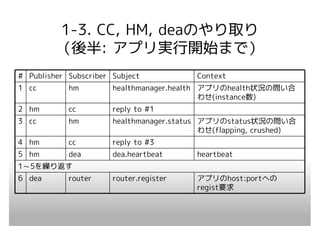
1-3. CC, HM,deaのやり取り
(後半: アプリ実行開始まで)
# Publisher Subscriber Subject Context
1 cc hm healthmanager.health アプリのhealth状況の問い合
わせ(instance数)
2 hm cc reply to #1
3 cc hm healthmanager.status アプリのstatus状況の問い合
わせ(flapping, crushed)
4 hm cc reply to #3
5 hm dea dea.heartbeat heartbeat
1~5を繰り返す
6 dea router router.register アプリのhost:portへの
regist要求
17.
NATSとCloud Foundry(2)
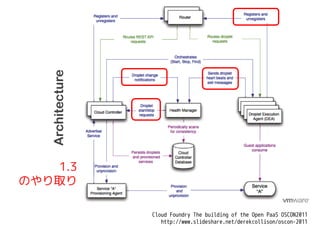
1.3
のやり取り
Cloud Foundry The building of the Open PaaS OSCON2011
http://www.slideshare.net/derekcollison/oscon-2011



![NATSメッセージの確認
• NATSの入っているサーバで
$ nats-sub ‘>’ –s nats://nats_address:nats_port/
Listening on [>]
[#1] Received on [router.start] : …
– ‘>’ で全てのpublishされたメッセージをListen
• vcap自体のログと合わせて見ると
動きが把握しやすい
• ソースを追う時は、
NATS/publish/subscribe
などでgrepするといい](https://image.slidesharecdn.com/natsoncfcfcrjp2-111118222602-phpapp01/85/NATS-on-VCAP-9-320.jpg)