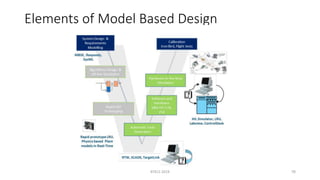
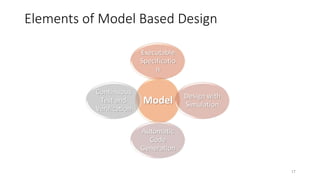
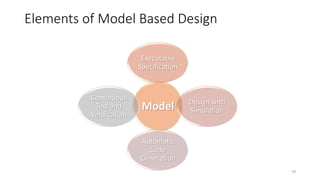
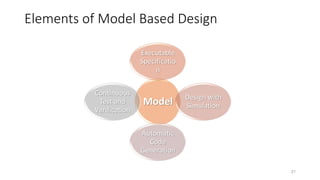
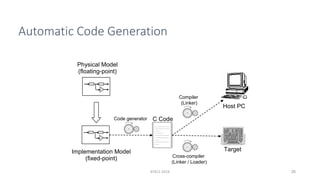
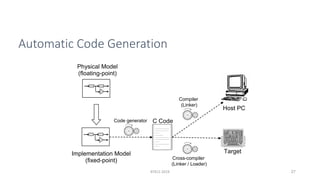
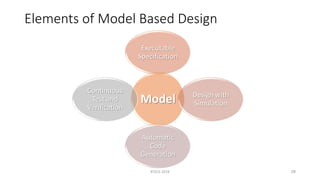
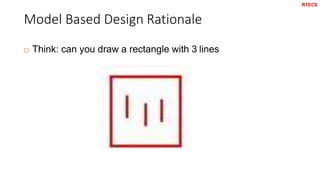
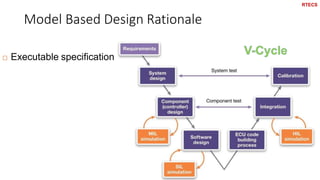
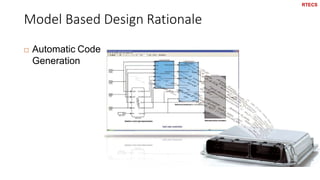
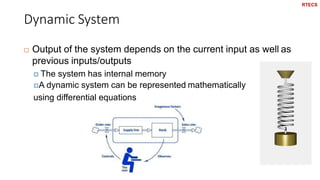
This document provides an overview of a course on real time embedded control systems using model based design concepts. The course aims to show a design path for real time embedded systems starting with system level simulation and ending with real time implementation of control algorithms. It covers topics such as introduction to MATLAB and Simulink, physical system modeling, control systems design, embedded coding, and advanced topics like state machines. Model based design is emphasized, with a focus on graphical system modeling, executable specifications, and automatic code generation.
























































![[Deck] What's New in Spark-Iceberg Integration via DSV2.pptx](https://cdn.slidesharecdn.com/ss_thumbnails/deckwhatsnewinspark-icebergintegrationviadsv2-260210005337-25955b12-thumbnail.jpg?width=640&height=640&fit=bounds)










