The document discusses different types of matrices including identity matrices, inverse matrices, transpose matrices, symmetric matrices, orthogonal matrices, upper triangular matrices, lower triangular matrices, and diagonal matrices. It provides examples and properties of each matrix type. Key points covered include that identity matrices satisfy AI = IA = A, inverse matrices satisfy AB = BA = I, the transpose of a matrix is formed by interchanging rows and columns, and orthogonal matrices satisfy AAT = ATA = I.

![4
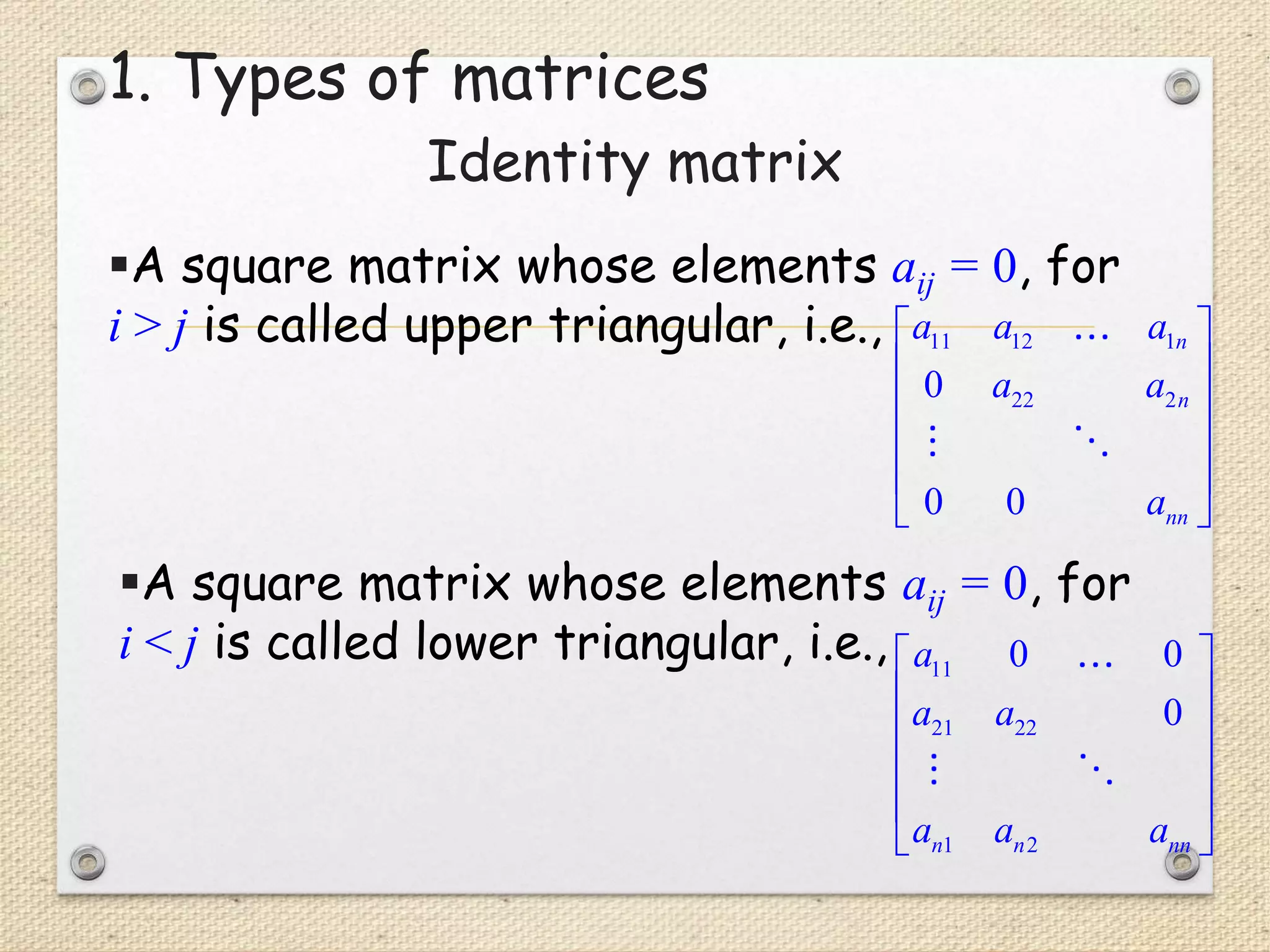
Both upper and lower triangular, i.e., aij = 0, for
i j , i.e., 11
22
0 0
0 0
0 0
nn
a
a
D
a
11 22
diag[ , ,..., ]
nn
D a a a
Identity matrix
1. Types of matrices
is called a diagonal matrix, simply](https://image.slidesharecdn.com/rrrrr-230201173311-17115acf/75/Matrix-presentation-4-2048.jpg)


![The transpose of a matrix
The matrix obtained by interchanging the
rows and columns of a matrix A is called the
transpose of A (write AT).
Example:
The transpose of A is
1 2 3
4 5 6
A
1 4
2 5
3 6
T
A
For a matrix A = [aij], its transpose AT = [bij],
where bij = aji.
1. Types of matrices](https://image.slidesharecdn.com/rrrrr-230201173311-17115acf/75/Matrix-presentation-7-2048.jpg)

















































