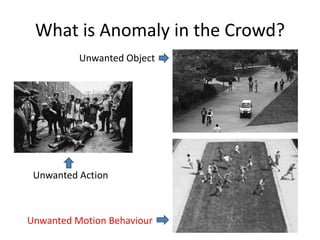
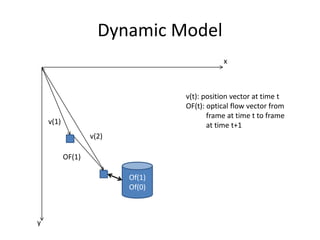
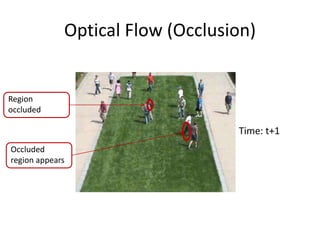
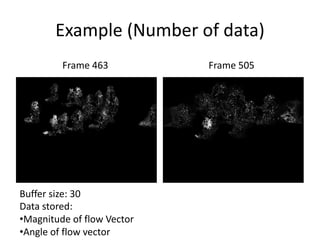
This document discusses anomaly detection in human crowds using dynamic motion vector modeling. It outlines detecting unwanted objects, actions, or motion behaviors in crowds to avoid hazardous situations or catch rule breakers. Current methods like surveillance operators are limited, so the goal is to develop an automated system. The proposed method models optical flow over time to track pixel trajectories dynamically. This allows modeling crowd motion, but faces challenges from occlusion, noisy optical flow, and shadows. Examples show segmenting normal motion models and detecting anomalies. Future work includes making the system more robust by modeling larger homogeneous regions.