The document discusses concepts and requirements for a Mars Exploration Rover (MER) that would transport astronauts across the surface of Mars. Some key points:
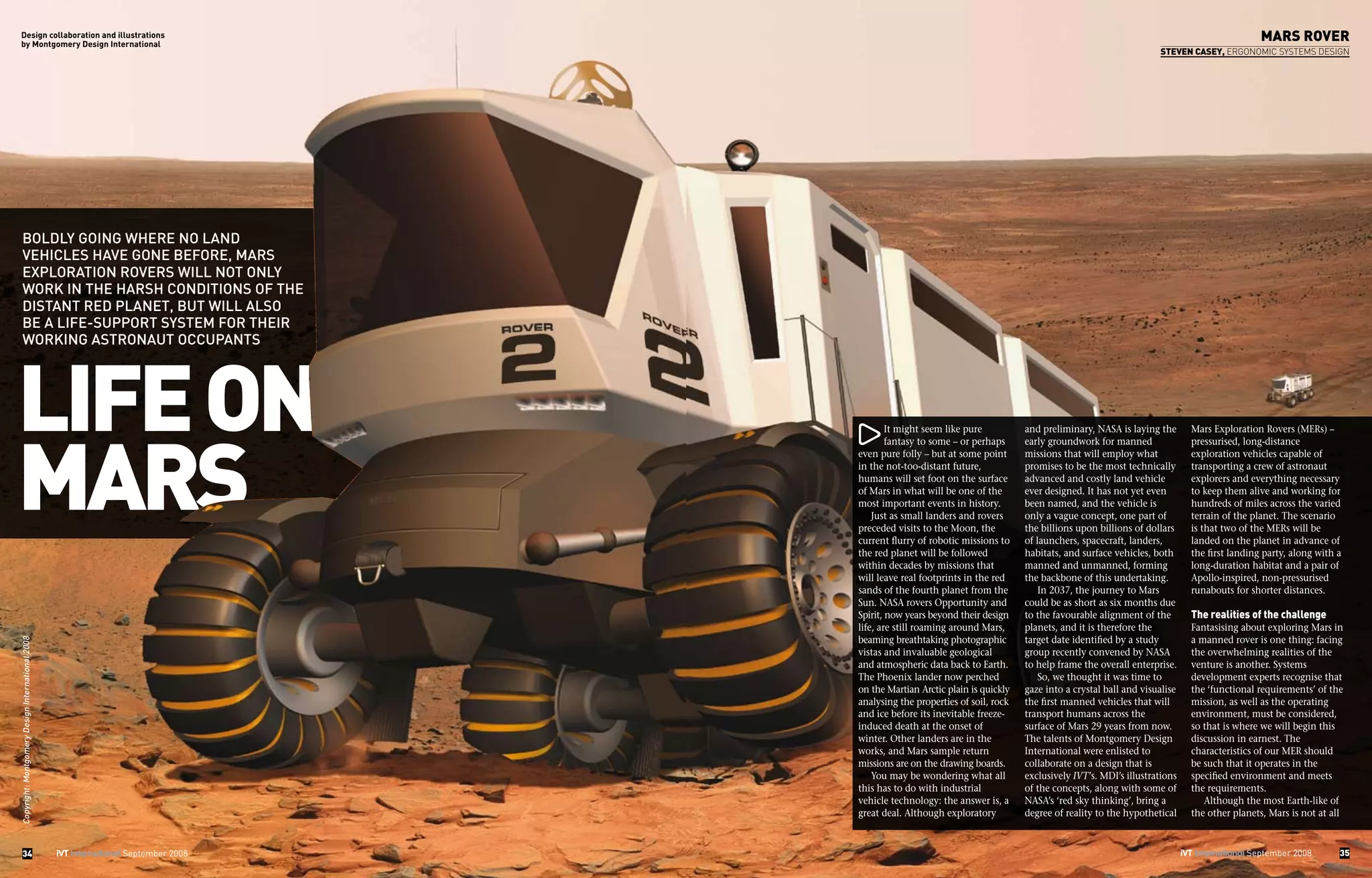
- The MER would be a pressurized, long-distance vehicle capable of transporting a crew of astronauts and sustaining them for hundreds of miles across Mars' terrain.
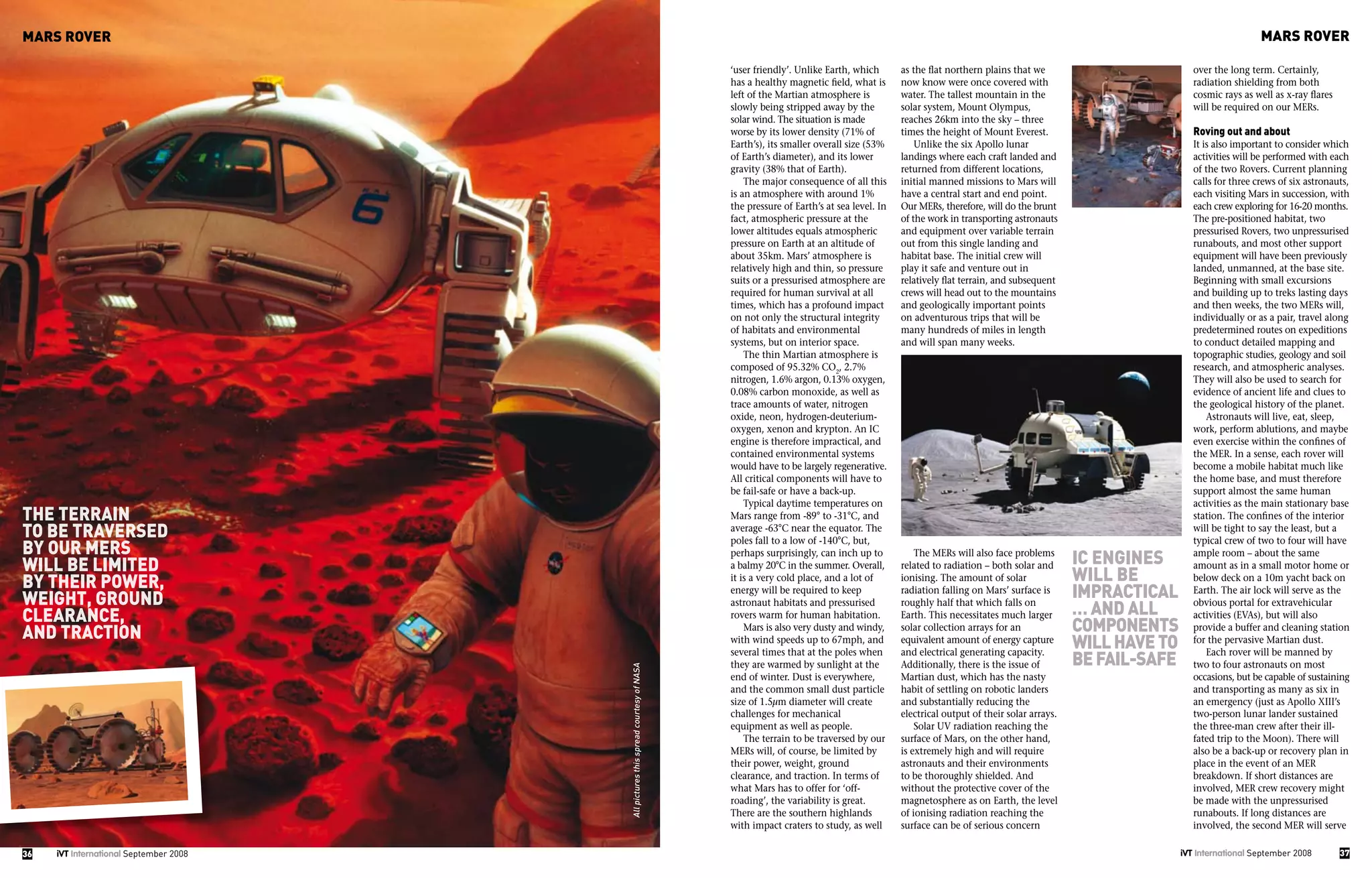
- It would need to operate in Mars' harsh environment, which has low atmospheric pressure, cold temperatures, dust storms, and radiation risks. Systems would need to be fail-safe or have backups.
- The MER would serve as a mobile habitat, allowing astronauts to live and work on long expeditions away from the main habitat base. It would carry supplies and have facilities for activities




















![[Challenge:Future] Space Debris](https://cdn.slidesharecdn.com/ss_thumbnails/challengefuture-space-debris4808-111119075832-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)





























![Mars project chelsea hoyle [autosaved]](https://cdn.slidesharecdn.com/ss_thumbnails/marsprojectchelseahoyleautosaved-140122143938-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)

















