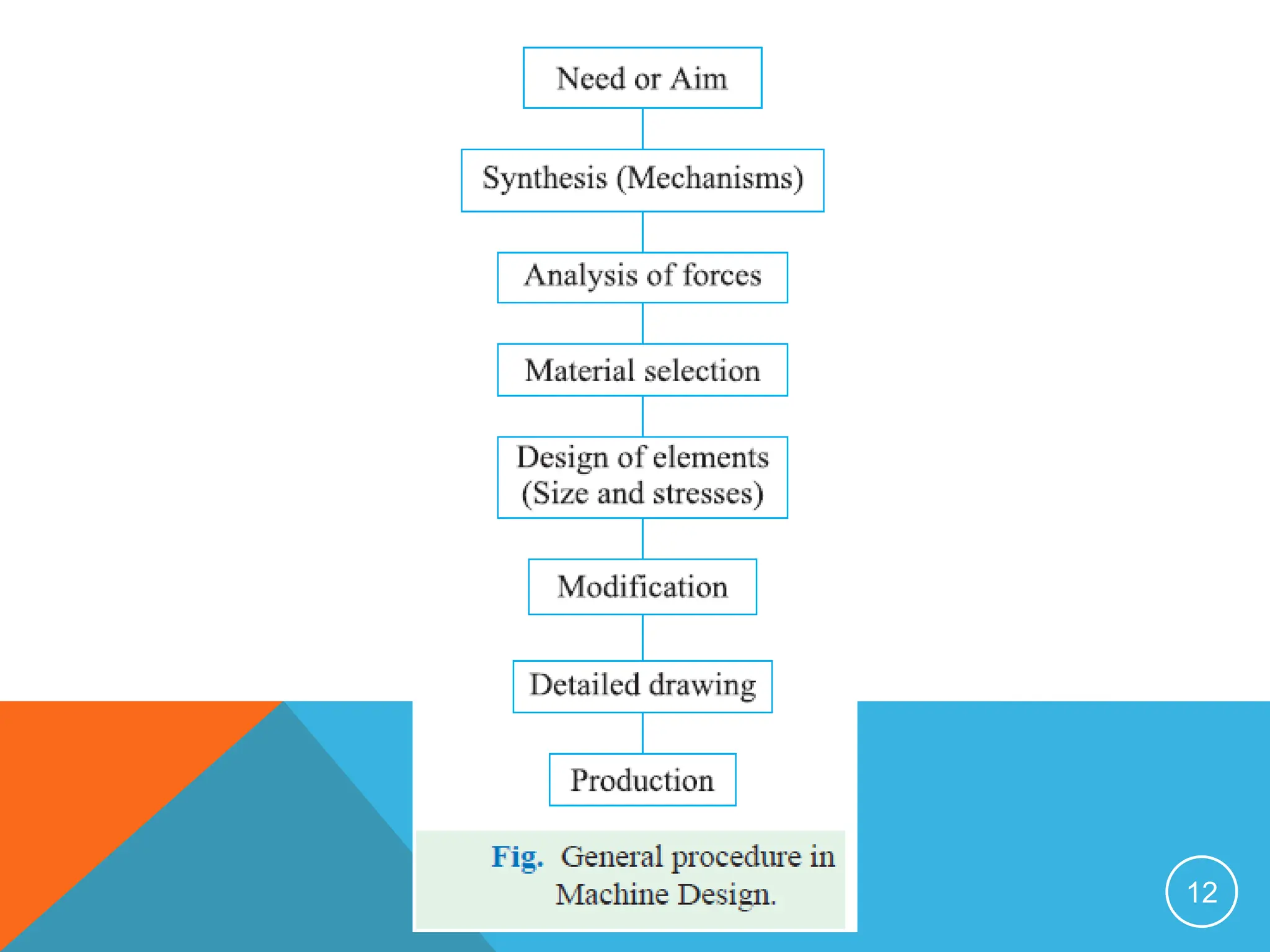
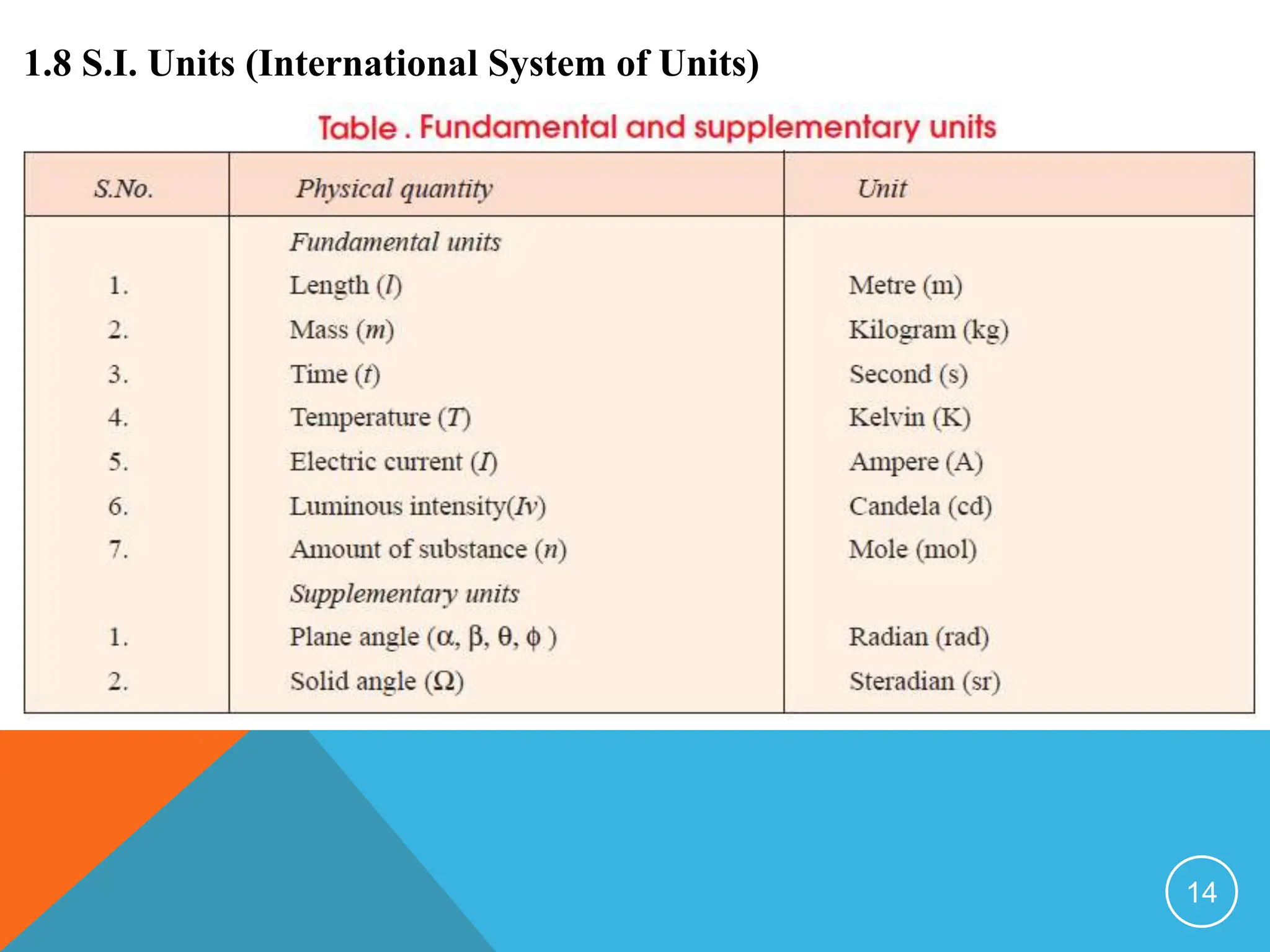
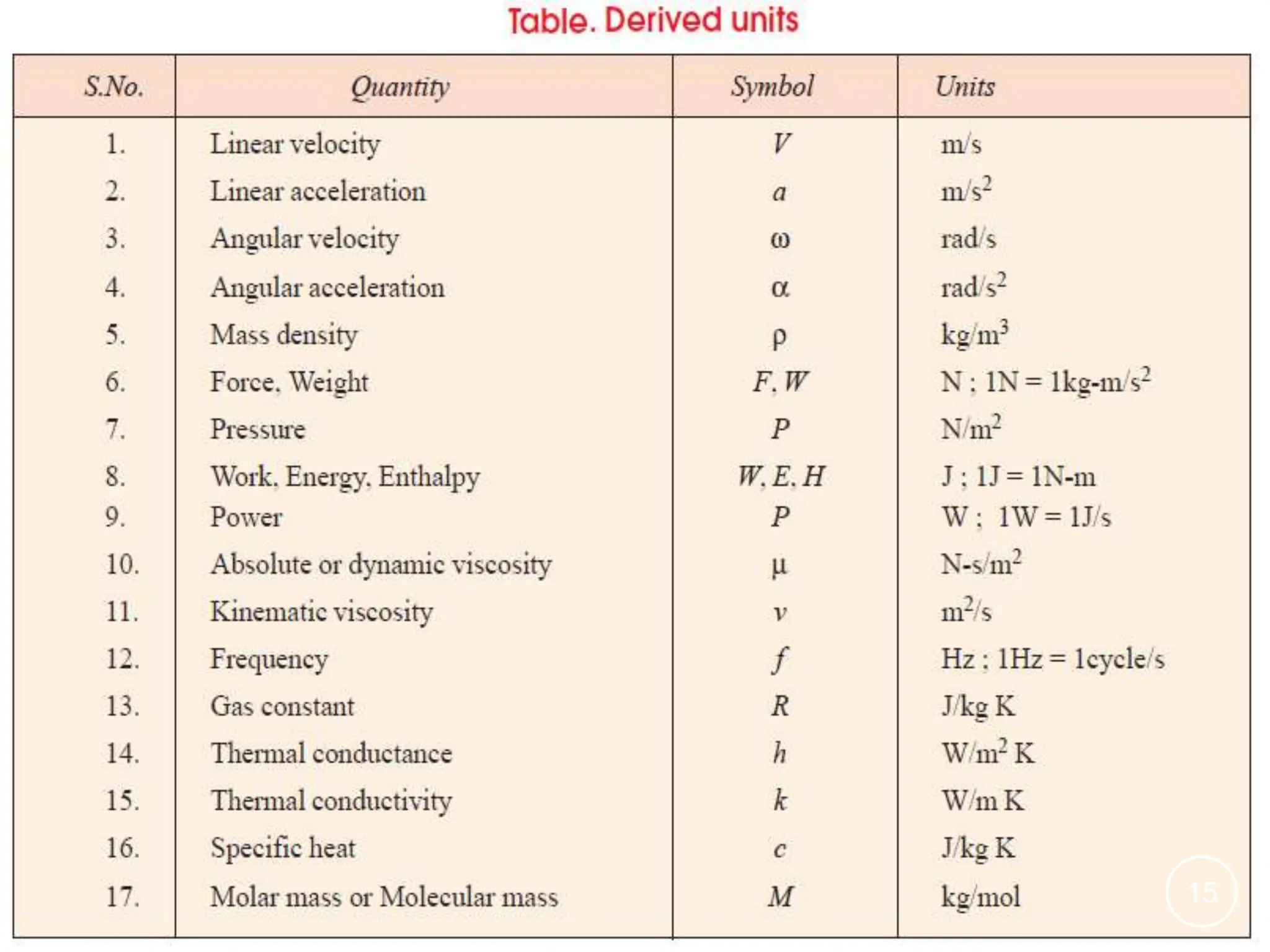
The document presents a comprehensive overview of machine design, covering topics such as engineering materials, stresses in machine parts, and classifications of machine design. It explains the general considerations and procedures in designing machine components, emphasizes the importance of fundamental and derived units, and outlines critical concepts like force, torque, and energy. Additionally, it details various types of design approaches, including adaptive, development, and new design, along with principles of mechanics and motion.



































![Chapter 1 [compatibility mode]](https://cdn.slidesharecdn.com/ss_thumbnails/chapter1compatibilitymode-120107005328-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)