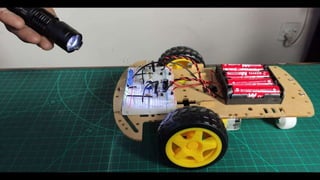
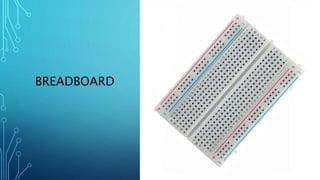
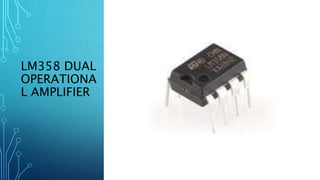
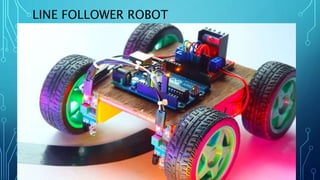
This document describes the parts and working of a light following robot. The mechanical parts include a chassis, motors, tires, switch, and battery holder. The technical parts include a breadboard, operational amplifiers, resistors, transistors, sensors, capacitors, and headers. It works by using LDR sensors - if the left sensor detects light it increases the left motor speed to turn right, and vice versa. When both sensors detect light it moves forward. The document then lists other related robotics projects such as line followers, drones, and remote controlled cars.