Download to read offline
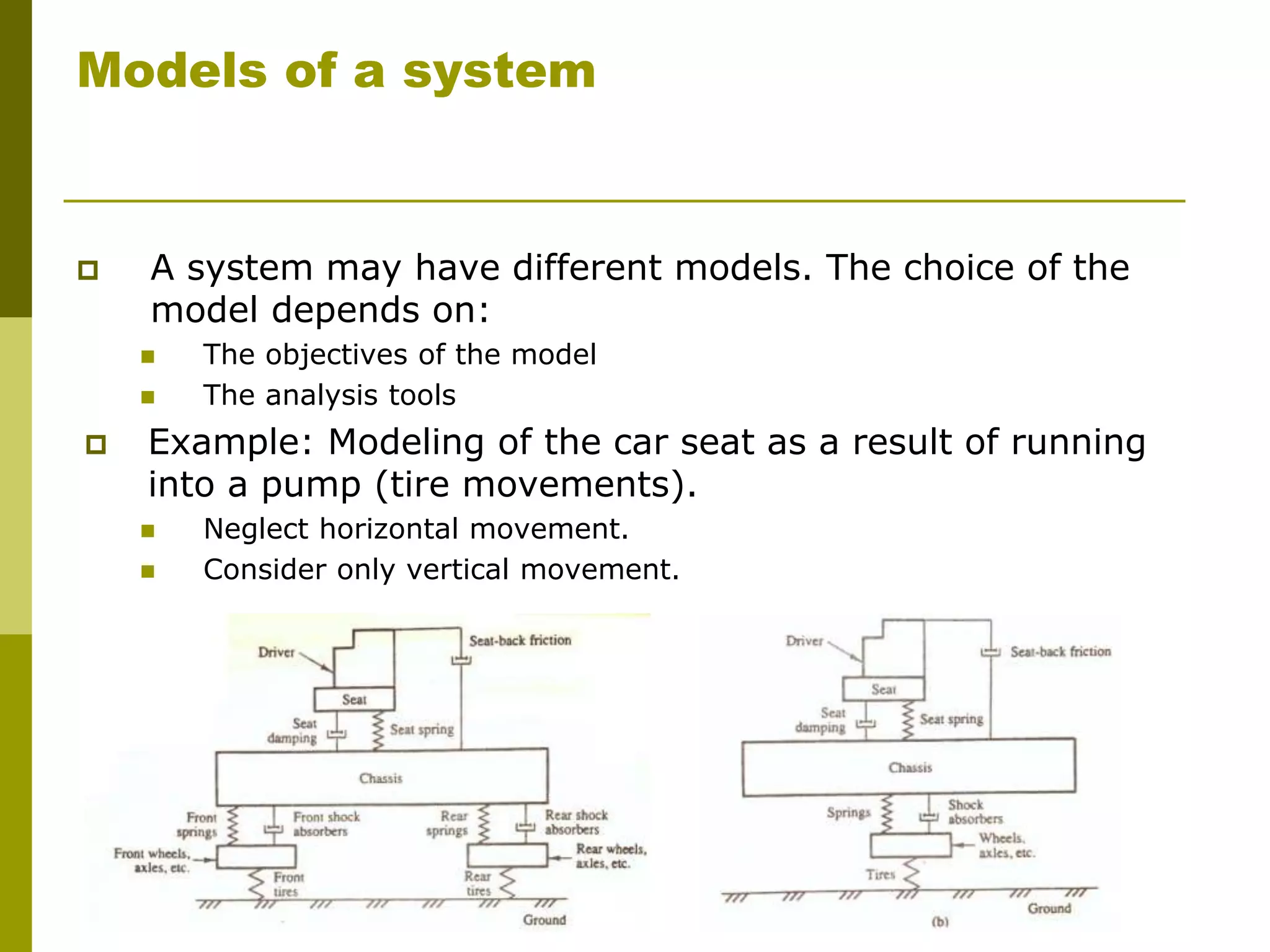
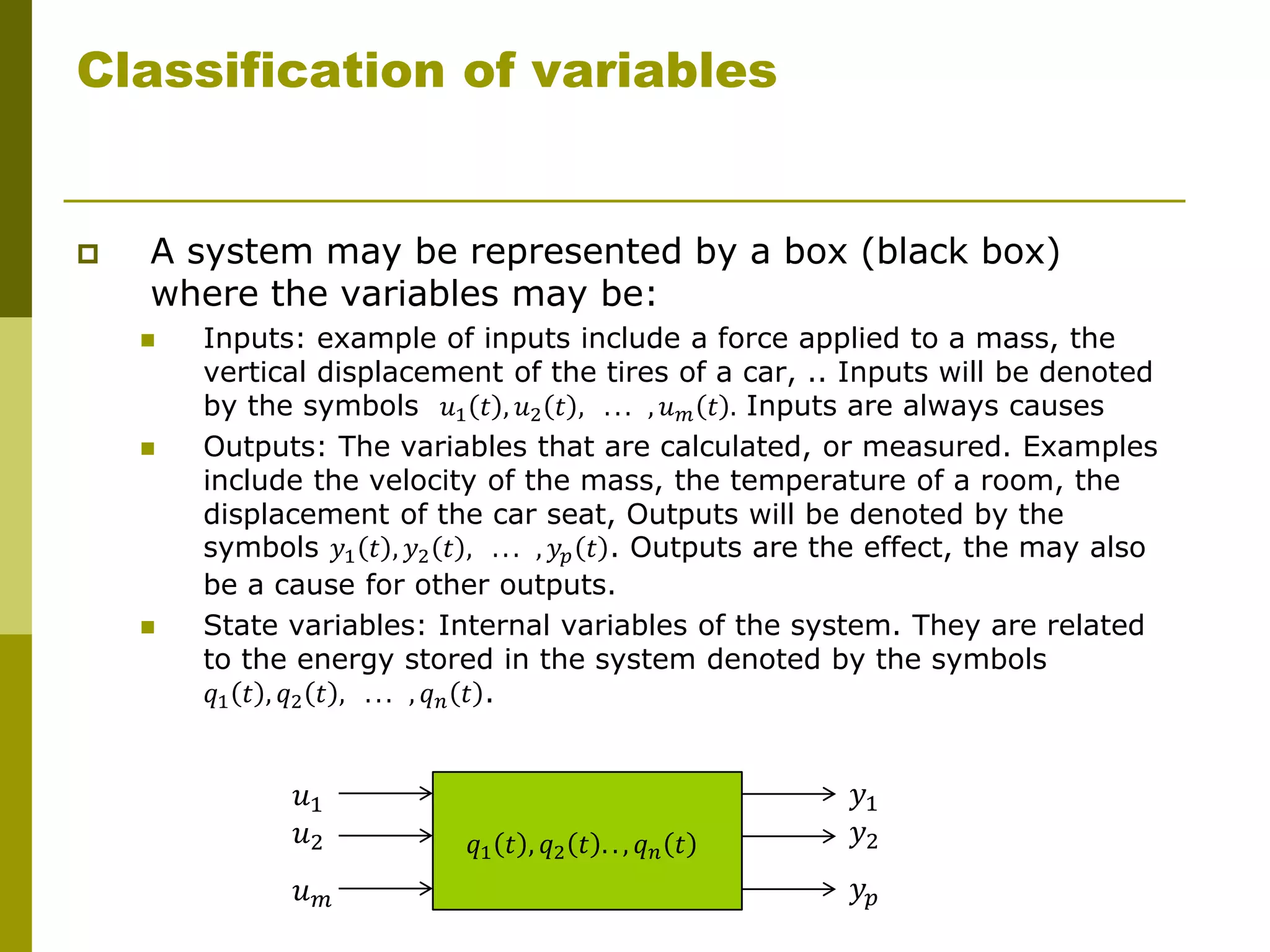
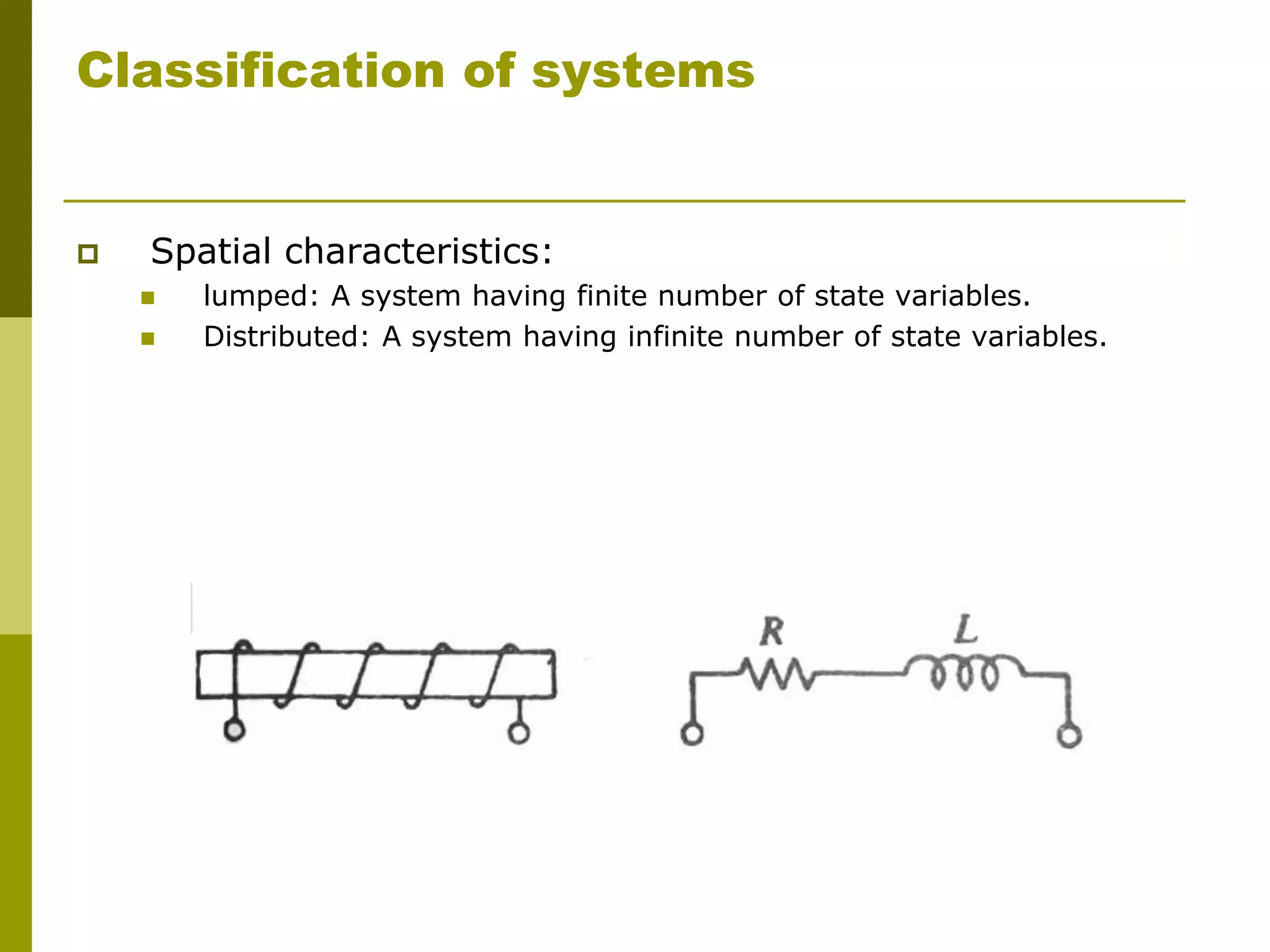
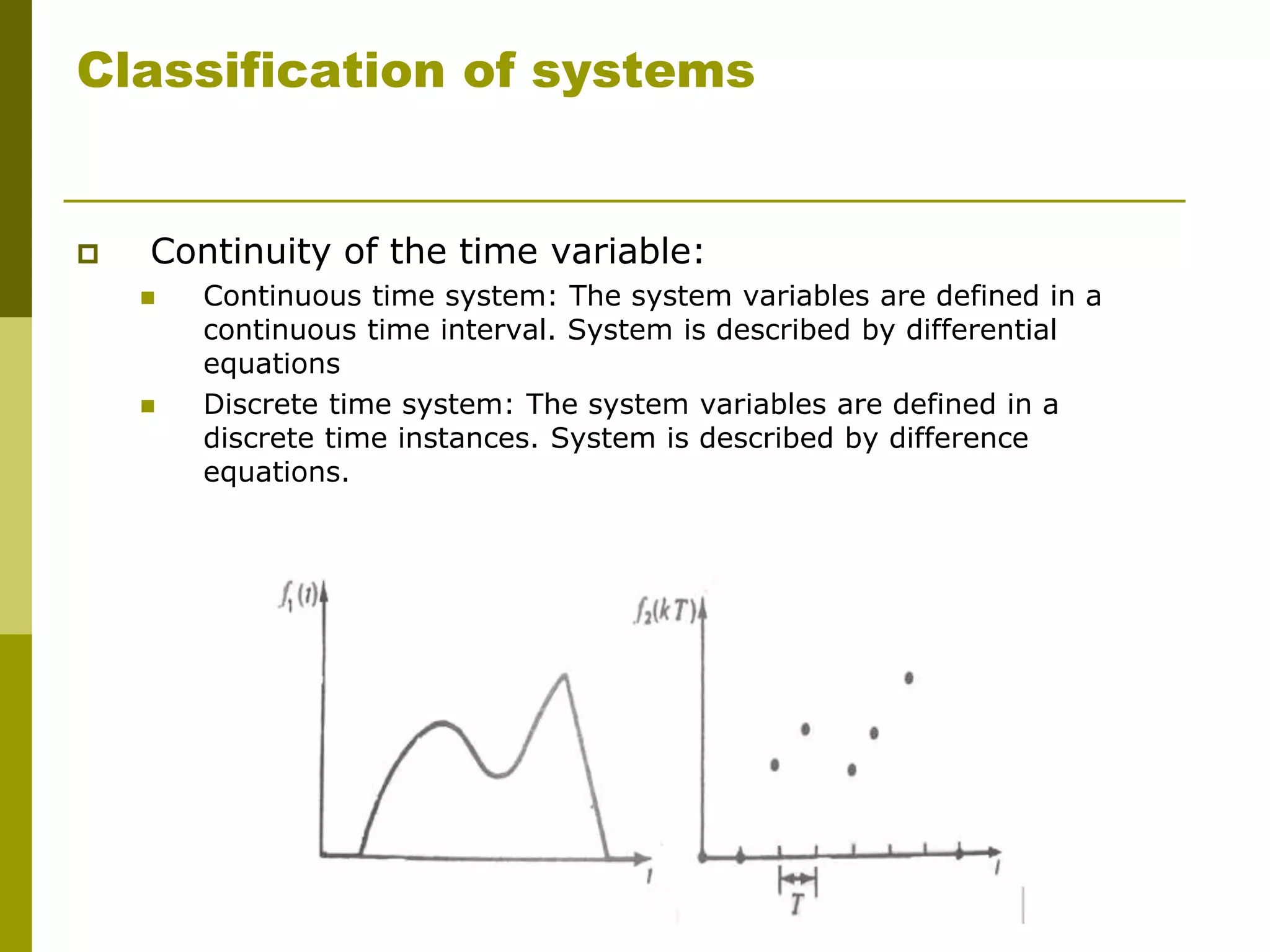

This document provides an overview of modeling dynamic systems. It discusses obtaining mathematical models of different types of systems like mechanical, electrical, and thermal systems. The models can be represented using input/output equations, state variable representations, or block diagrams. The document also defines key terms like dynamic systems, system models, inputs, outputs, and state variables. It classifies systems based on characteristics such as being lumped or distributed, continuous or discrete time, time variant or invariant, and linear or nonlinear.




















![[Katsuhiko ogata] system_dynamics_(4th_edition)(book_zz.org)](https://cdn.slidesharecdn.com/ss_thumbnails/7ssfatynr0etpmmk5kcp-signature-6ac5206b27c2bb7b2bb24ba2afd6cd8c40ac57a8f3fb8a45f54486315e6207ed-poli-150505233422-conversion-gate02-thumbnail.jpg?width=640&height=640&fit=bounds)
























