Downloaded 44 times








![Линейная SVM (реализация)
// Set up training data
float labels[4] = {1.0, -1.0, -1.0, -1.0};
Mat labelsMat(3, 1, CV_32FC1, labels);
float trainingData[4][2] = { {501, 10}, {255, 10}, {501, 255}, {10, 501} };
Mat trainingDataMat(3, 2, CV_32FC1, trainingData);
// Set up SVM's parameters
CvSVMParams params; params.svm_type = CvSVM::C_SVC;
params.kernel_type = CvSVM::LINEAR;
params.term_crit = cvTermCriteria(CV_TERMCRIT_ITER, 100, 1e-6);
// Train the SVM
CvSVM SVM;
SVM.train(trainingDataMat, labelsMat, Mat(), Mat(), params);
float response = SVM.predict(sampleMat);
Вопрос: как должна выглядеть sampleMat?
24](https://image.slidesharecdn.com/l06detection-111031000517-phpapp02/85/L06-detection-24-320.jpg)











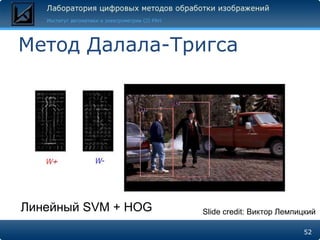
![Далал-Тригс vs. Виола-Джонс
• Для лиц Виола-Джонс работает почти идеально
• Для пешеходов Далал-Тригс аккуратнее (но медленнее)
• [Dollar et al. BMVC’09]: Виола-Джонс на правильных
каналах не хуже Далала-Тригса
Slide credit: Виктор Лемпицкий
55](https://image.slidesharecdn.com/l06detection-111031000517-phpapp02/85/L06-detection-55-320.jpg)
![Что осталось «за бортом»
• Локализация объектов и Хаф-леса
[Juergen Gall & Victor Lempitsky,
Class-Specific Hough Forests for
Object Detection, CVPR 2009]
• Неявная модель формы [Leibe,
Leonardis & Schiele IJCV’08]
• Обобщенное преобразование Хафа
57](https://image.slidesharecdn.com/l06detection-111031000517-phpapp02/85/L06-detection-57-320.jpg)

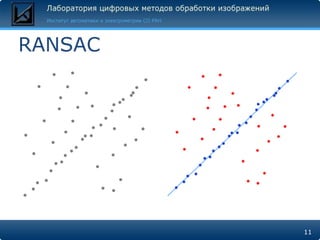
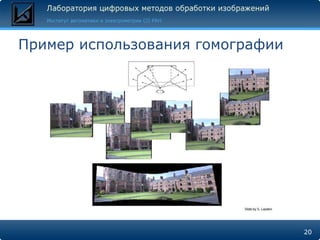
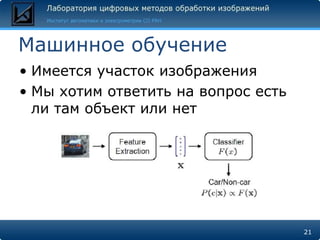
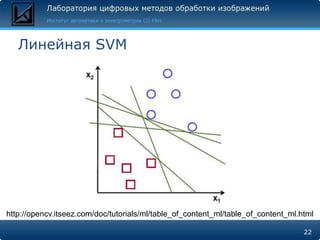
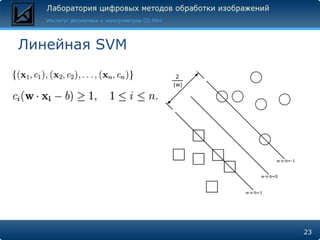
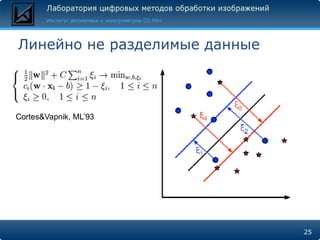
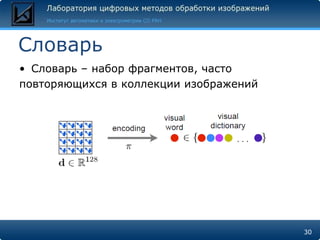
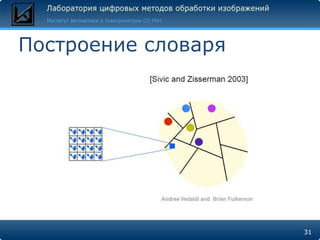
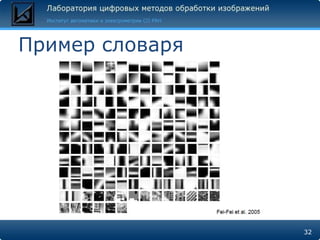
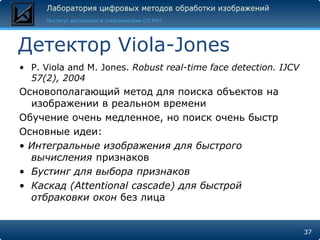
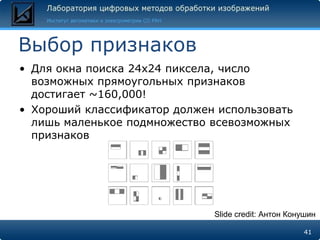
Документ охватывает методы обнаружения объектов, включая подходы, такие как RANSAC и алгоритм Виолы-Джонса. Основное внимание уделяется описанию ключевых понятий, таких как локальные особенности, дескрипторы, и использование SVM для классификации изображений. Также рассматриваются высокоуровневые идеи, такие как построение мешков слов и применение методов машинного обучения для поиска объектов на изображениях.




























































