Downloaded 41 times







![Matlab + Vlfeat
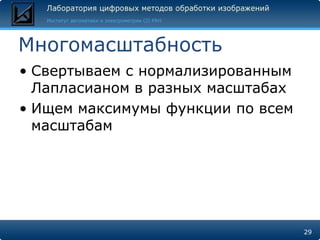
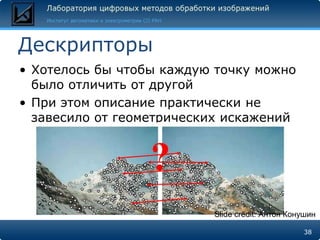
Вычисление особых точек +
дескриптора
• [fa, da] = vl_sift(Ia) ;
• [fb, db] = vl_sift(Ib) ;
Вычисление сопоставления
• [matches, scores] =
vl_ubcmatch(da, db) ;
49](https://image.slidesharecdn.com/l05features-111031000332-phpapp01/85/L05-features-49-320.jpg)



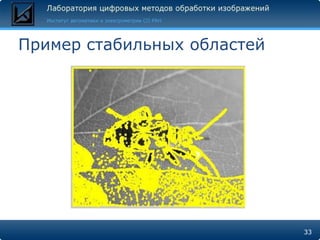
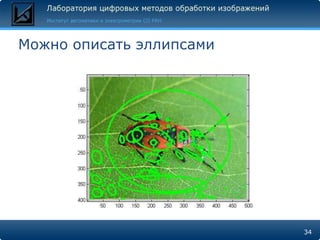
Документ описывает методы поиска и сравнения объектов на изображениях с использованием локальных особенностей, таких как углы и пятна, для обеспечения инвариантности к искажениям и изменениям освещения. Основные алгоритмы, включая Harris, SIFT и MSER, представлены с акцентом на их реализацию в OpenCV и MATLAB. Документ также затрагивает принципы работы дескрипторов, которые делают каждую точку уникальной и устойчивой к изменению условий съемки.















































