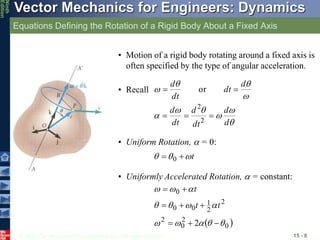
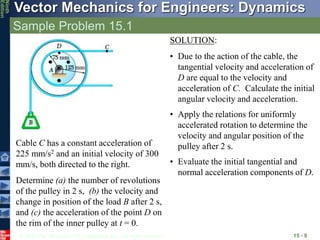
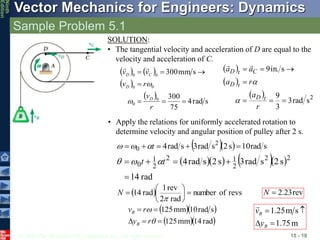
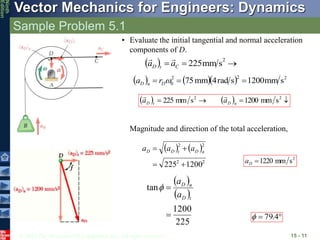
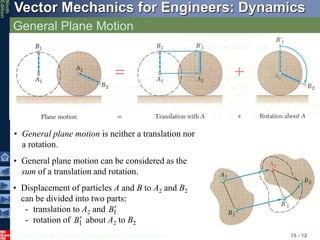
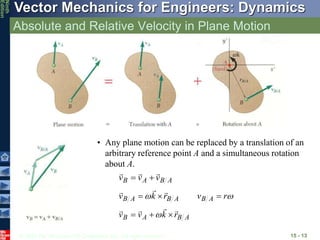
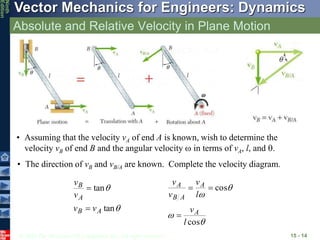
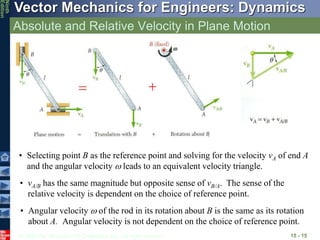
This document contains chapter materials from the textbook "Vector Mechanics for Engineers: Dynamics, Ninth Edition" regarding the kinematics of rigid bodies. It covers various topics in rigid body motion including translation, rotation about a fixed axis, general plane motion, and absolute and relative velocity and acceleration. It provides definitions, equations of motion, and example problems for different types of rigid body kinematics.








































![[Deck] What's New in Spark-Iceberg Integration via DSV2.pptx](https://cdn.slidesharecdn.com/ss_thumbnails/deckwhatsnewinspark-icebergintegrationviadsv2-260210005337-25955b12-thumbnail.jpg?width=640&height=640&fit=bounds)






