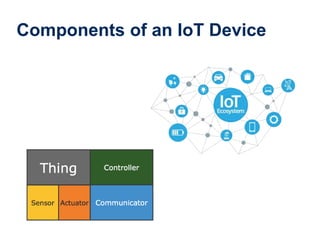
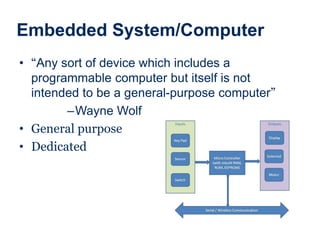
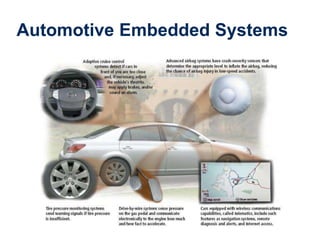
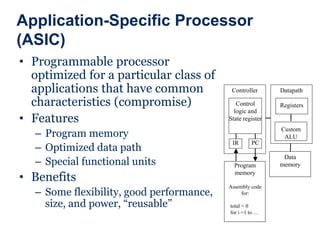
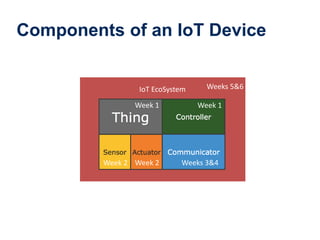
This document discusses embedded systems and their role in internet-of-things devices. It defines embedded systems as dedicated computers designed for specific tasks. Modern cars can contain over 100 embedded systems to control various functions. Embedded systems are also found in other devices like home appliances. The document outlines the key components of embedded systems, including embedded processors, and discusses design considerations for real-time embedded systems used in applications like industrial control systems.