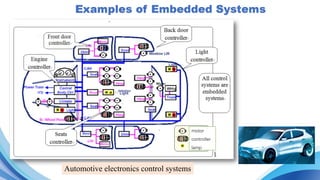
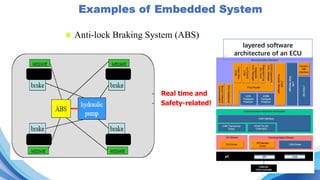
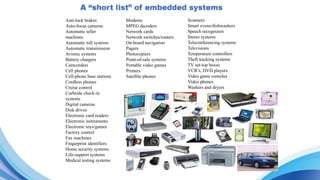
This document discusses embedded systems and operating systems. It begins by defining embedded systems and real-time systems. It then discusses embedded operating systems and their use in applications like automotive electronics. The document outlines some key characteristics of embedded systems like being application oriented, having custom hardware and software, and strict requirements around functionality, reliability, cost, size and power consumption. It provides examples of embedded systems across many domains. Finally, it discusses features of embedded operating systems like being specialized, supporting real-time capabilities, and having constraints in memory and power.