~ Tohoku ComCamp2016 ~
Introduction to Visual Studio Code
五十嵐 祐貴(いがらし ゆうき) @bonprosoft
Microsoft MVP
サトヤ仙台
2.
自己紹介
• 五十嵐 祐貴( @bonprosoft )
• Microsoft MVP for Visual Studio and Development Technologies
• Microsoft Student Partners Fellow
• サトヤ仙台 代表
• 他
o 東北大学工学部電気情報工学科
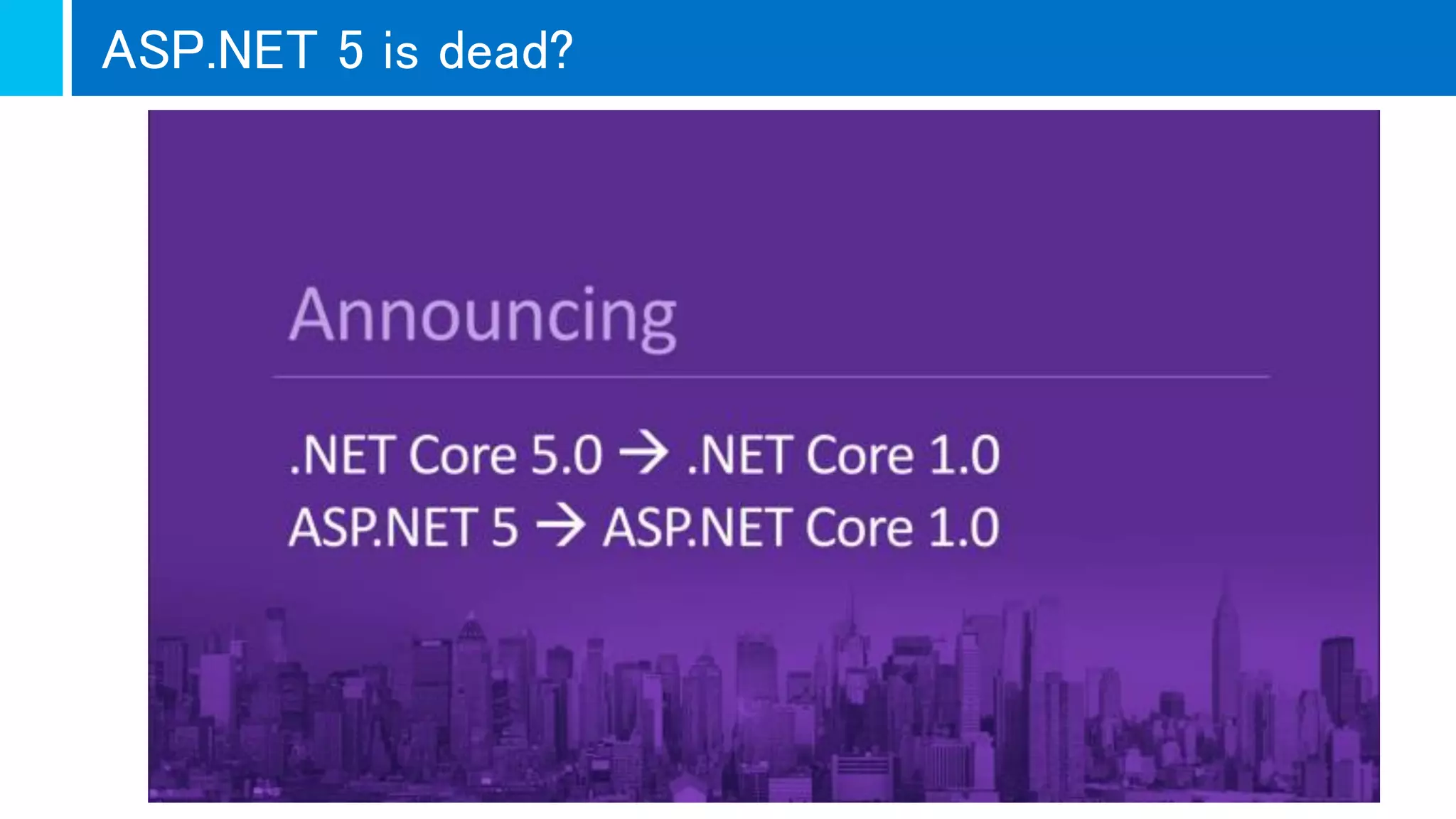
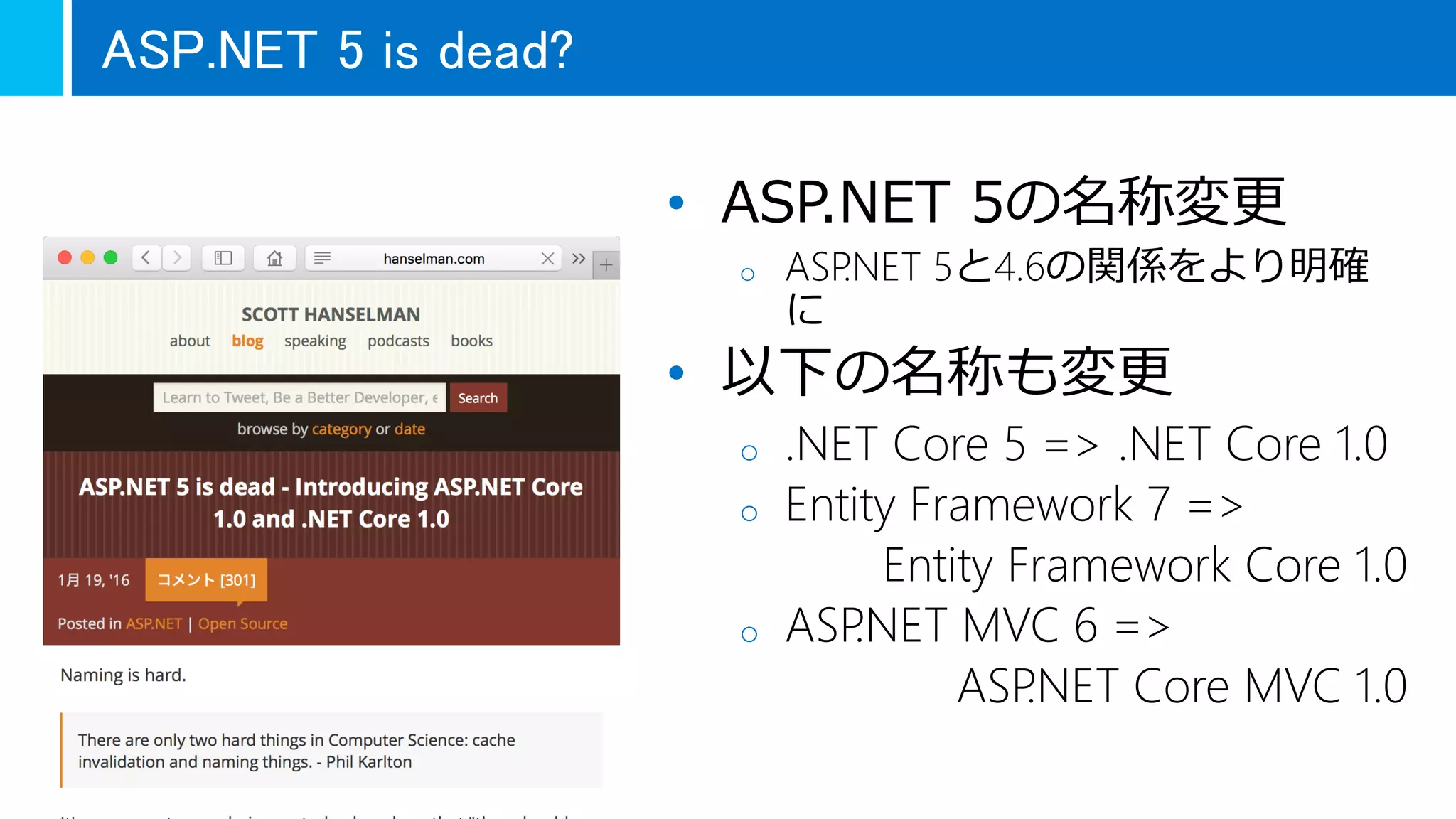
• ASP.NET 5の名称変更
oASP.NET 5と4.6の関係をより明確
に
• 以下の名称も変更
o .NET Core 5 => .NET Core 1.0
o Entity Framework 7 =>
Entity Framework Core 1.0
o ASP.NET MVC 6 =>
ASP.NET Core MVC 1.0
ASP.NET 5 is dead?
14.
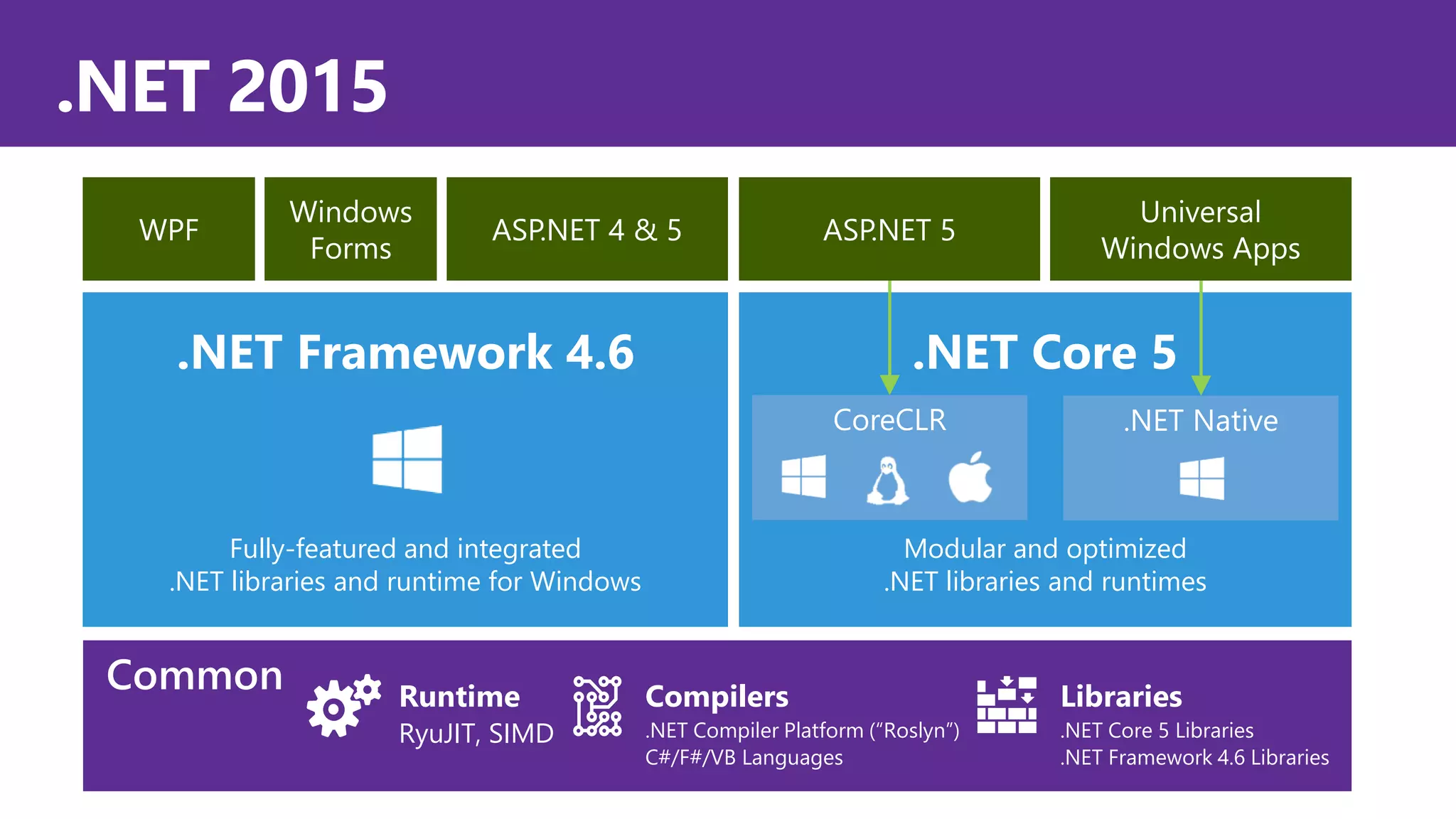
.NET 2015
RyuJIT, SIMD
RuntimeCompilers
.NET Compiler Platform (“Roslyn”)
C#/F#/VB Languages
.NET Core 5 Libraries
.NET Framework 4.6 Libraries
Libraries
.NET Framework 4.6 .NET Core 5
Fully-featured and integrated
.NET libraries and runtime for Windows
Modular and optimized
.NET libraries and runtimes
15.
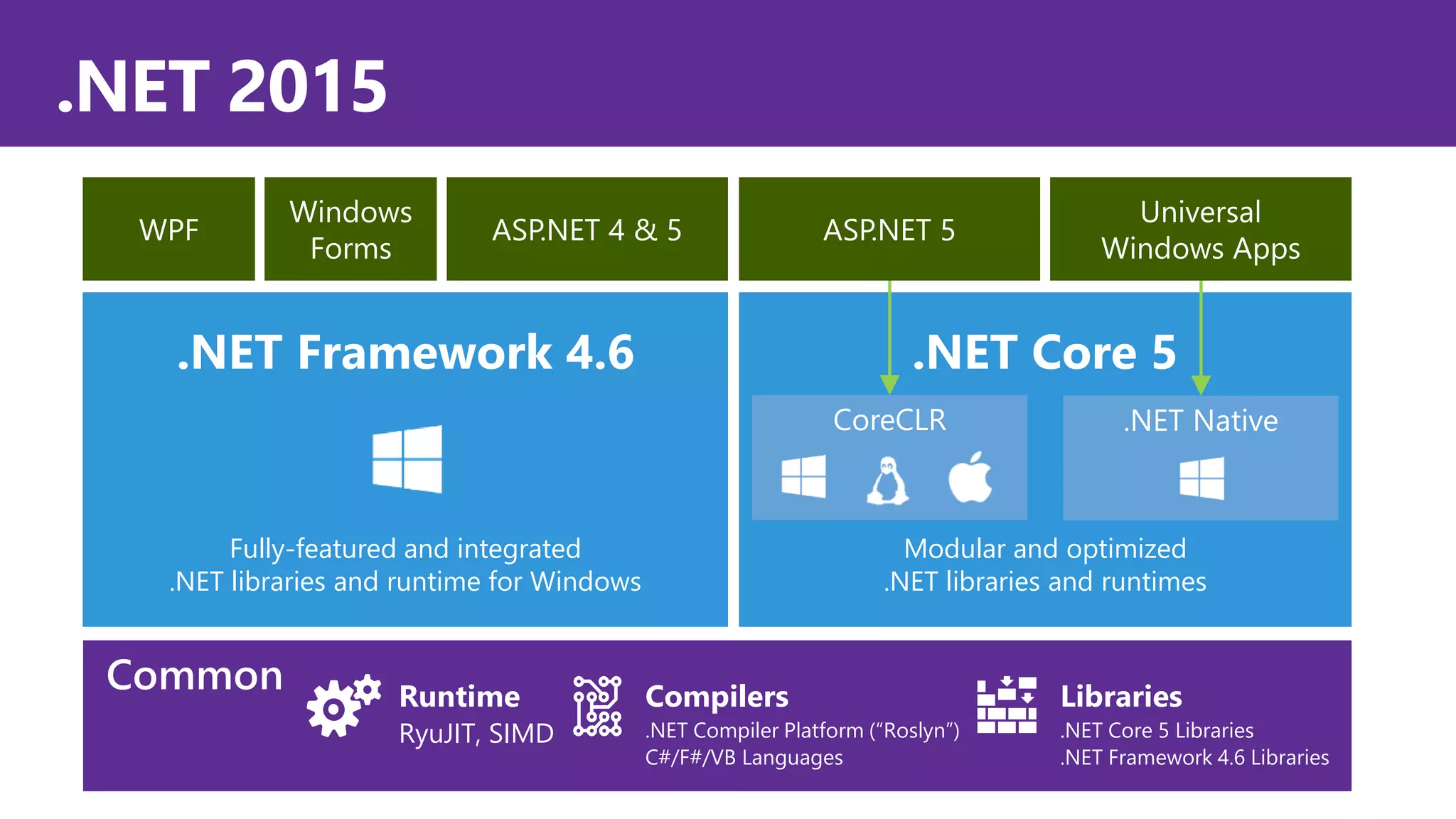
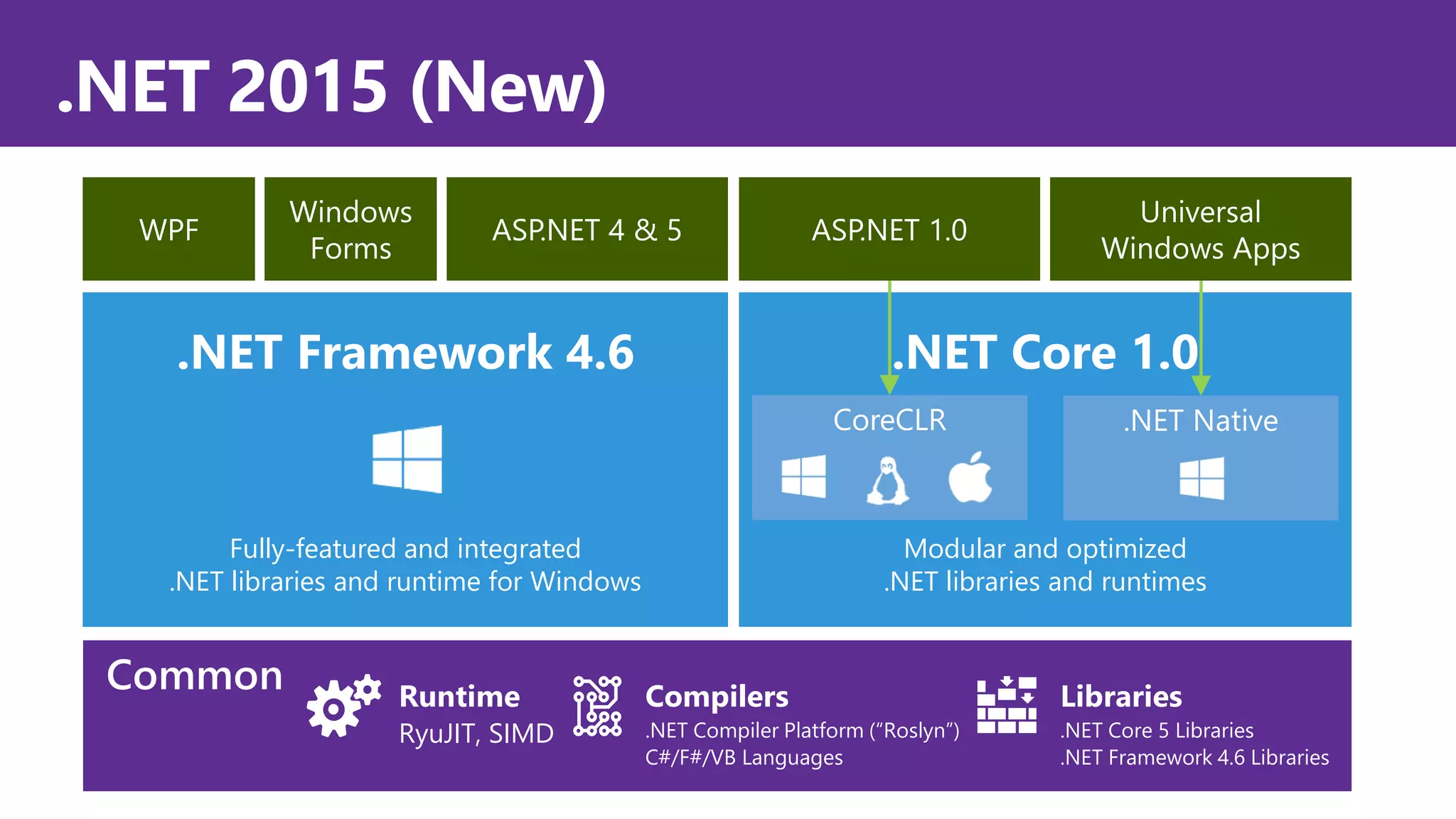
.NET 2015 (New)
RyuJIT,SIMD
Runtime Compilers
.NET Compiler Platform (“Roslyn”)
C#/F#/VB Languages
.NET Core 5 Libraries
.NET Framework 4.6 Libraries
Libraries
.NET Framework 4.6 .NET Core 1.0
Fully-featured and integrated
.NET libraries and runtime for Windows
Modular and optimized
.NET libraries and runtimes
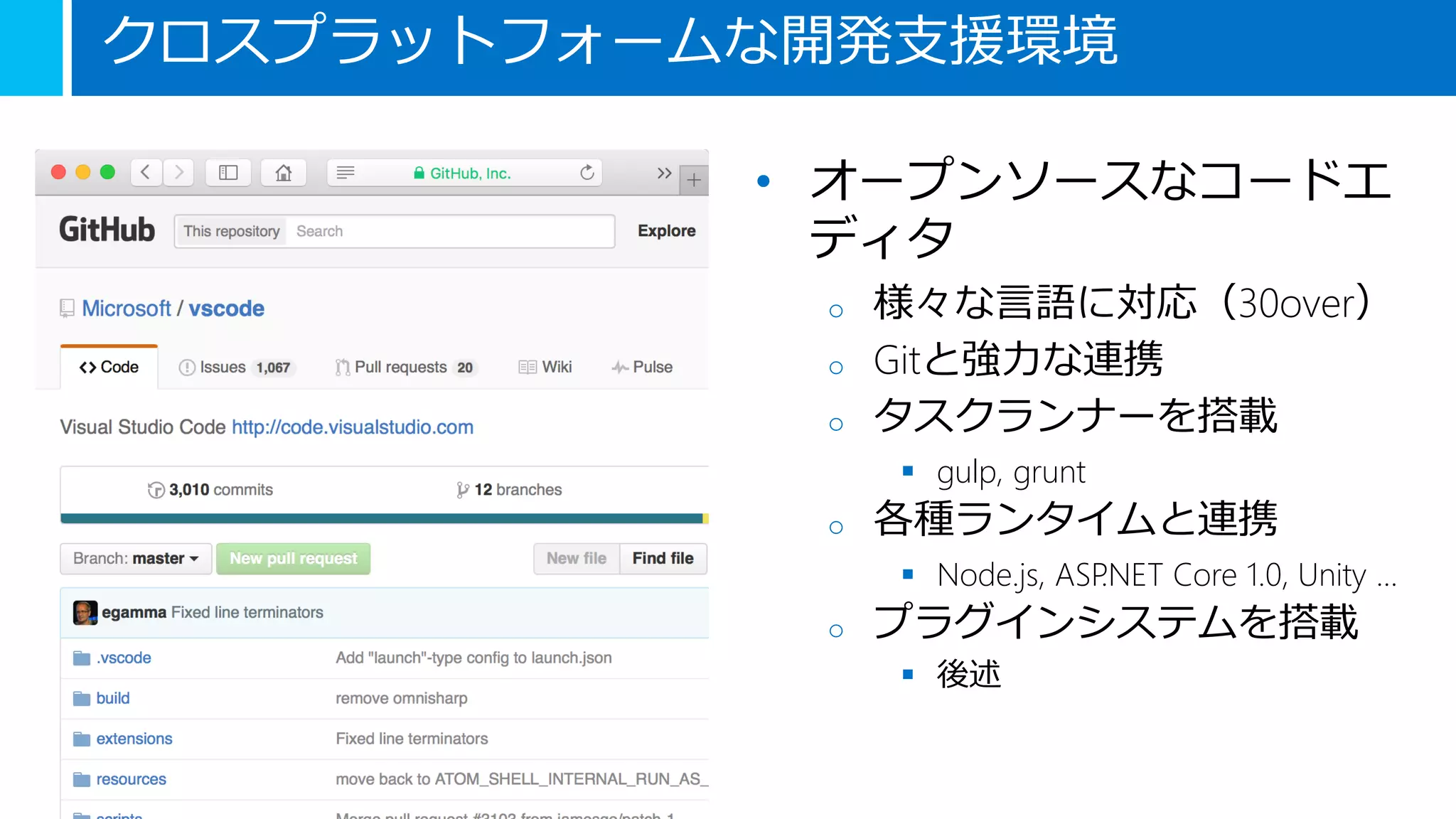
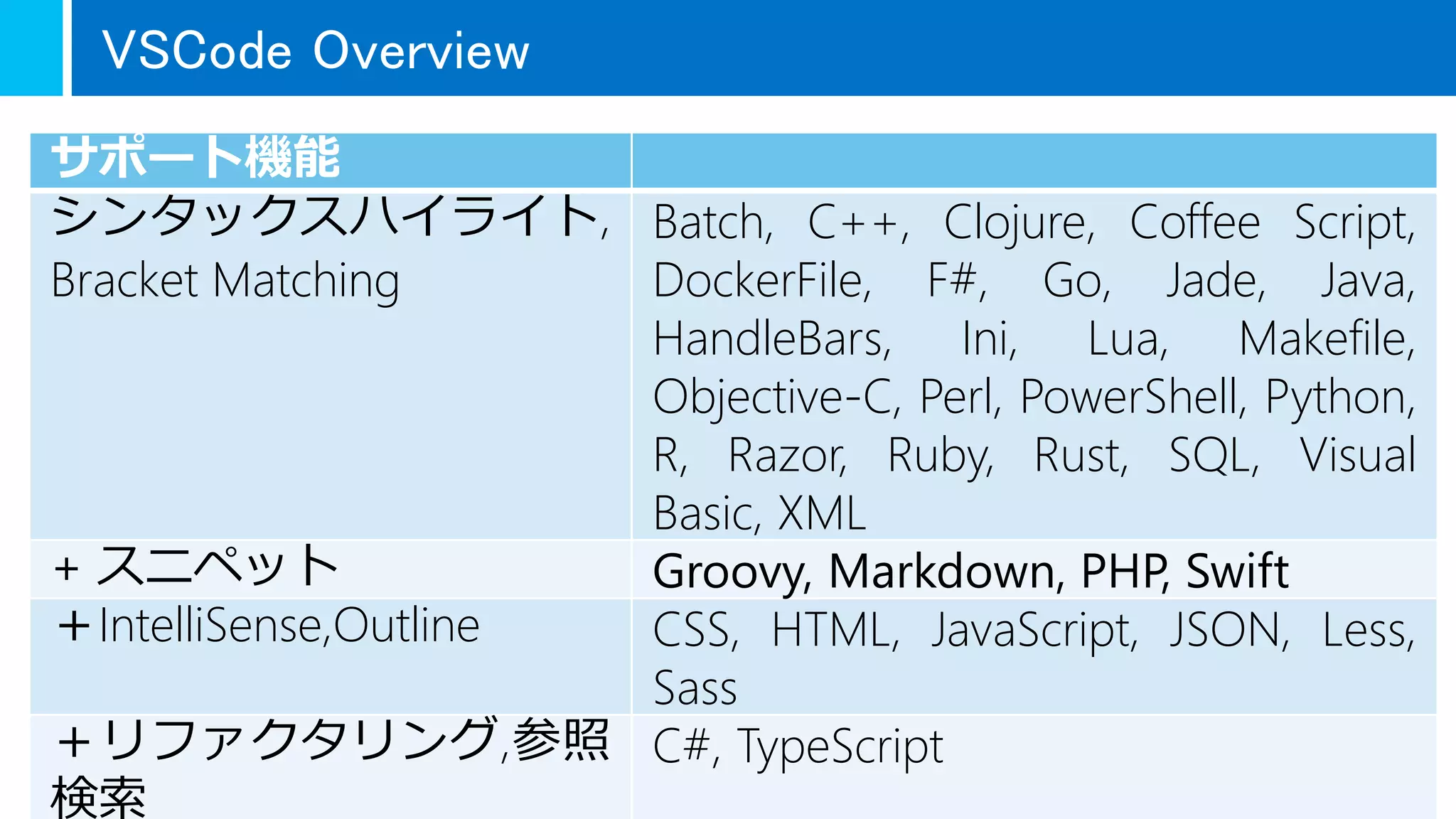
• オープンソースなコードエ
ディタ
o 様々な言語に対応(30over)
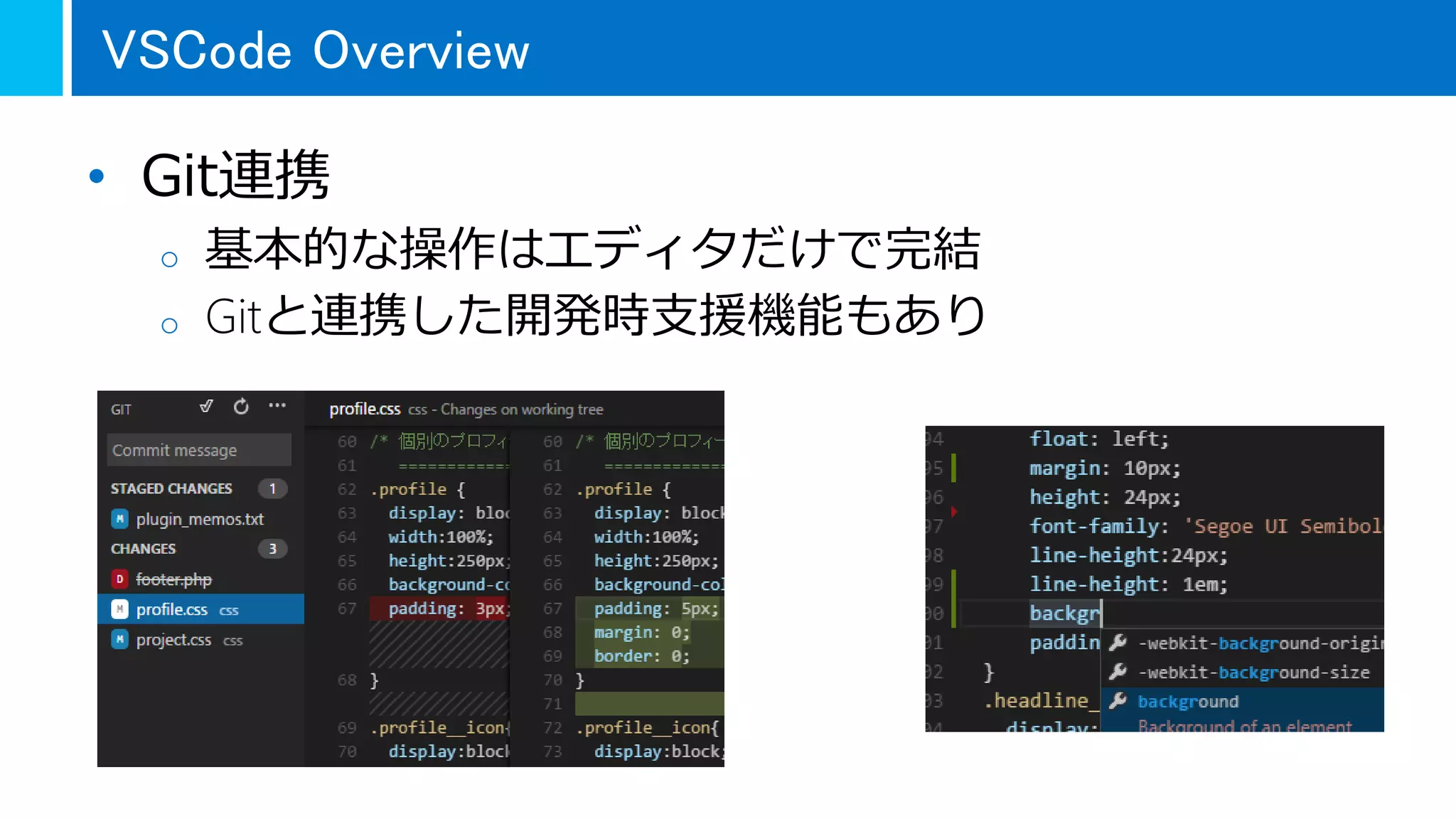
oGitと強力な連携
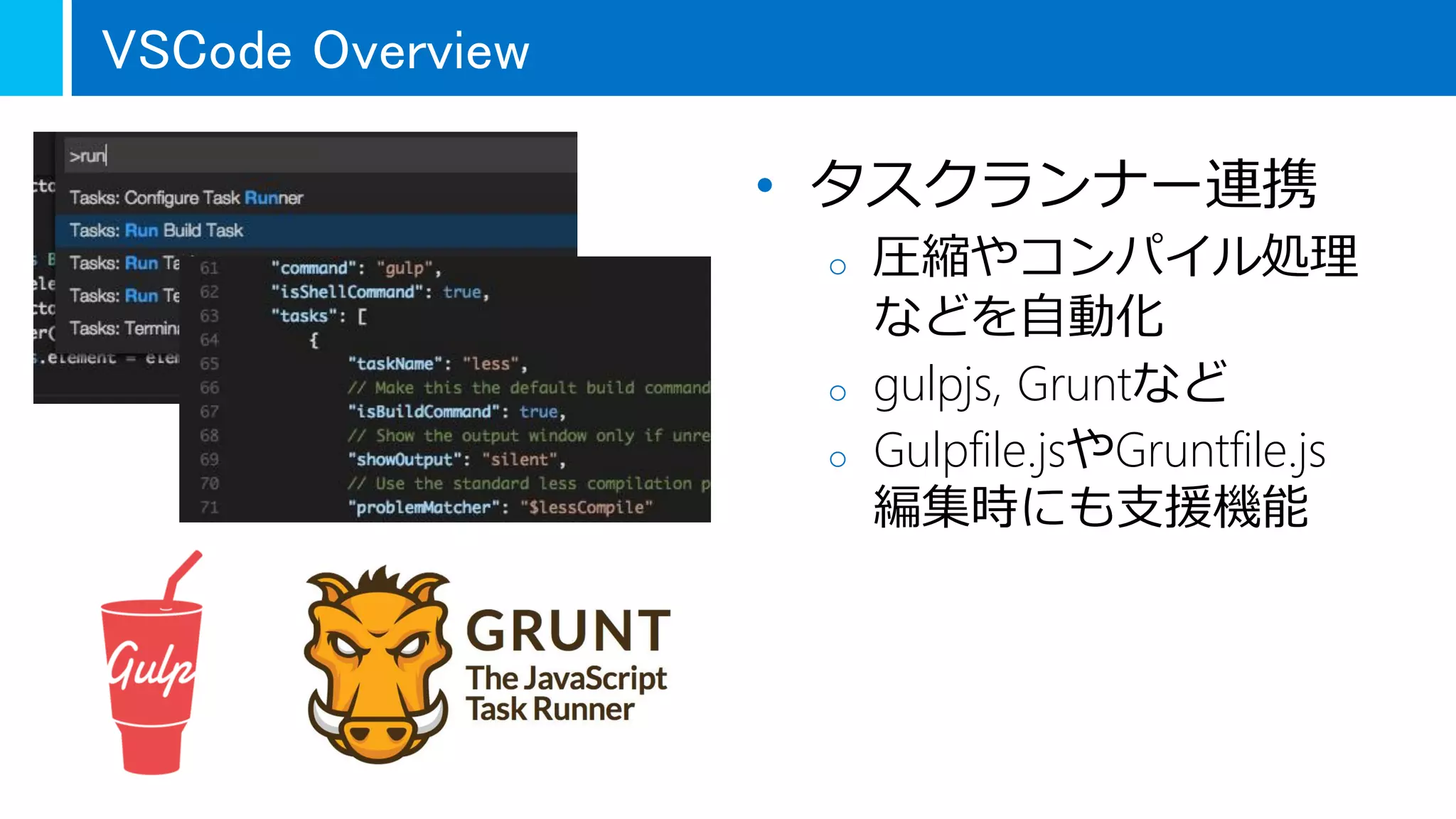
o タスクランナーを搭載
gulp, grunt
o 各種ランタイムと連携
Node.js, ASP.NET Core 1.0, Unity …
o プラグインシステムを搭載
後述
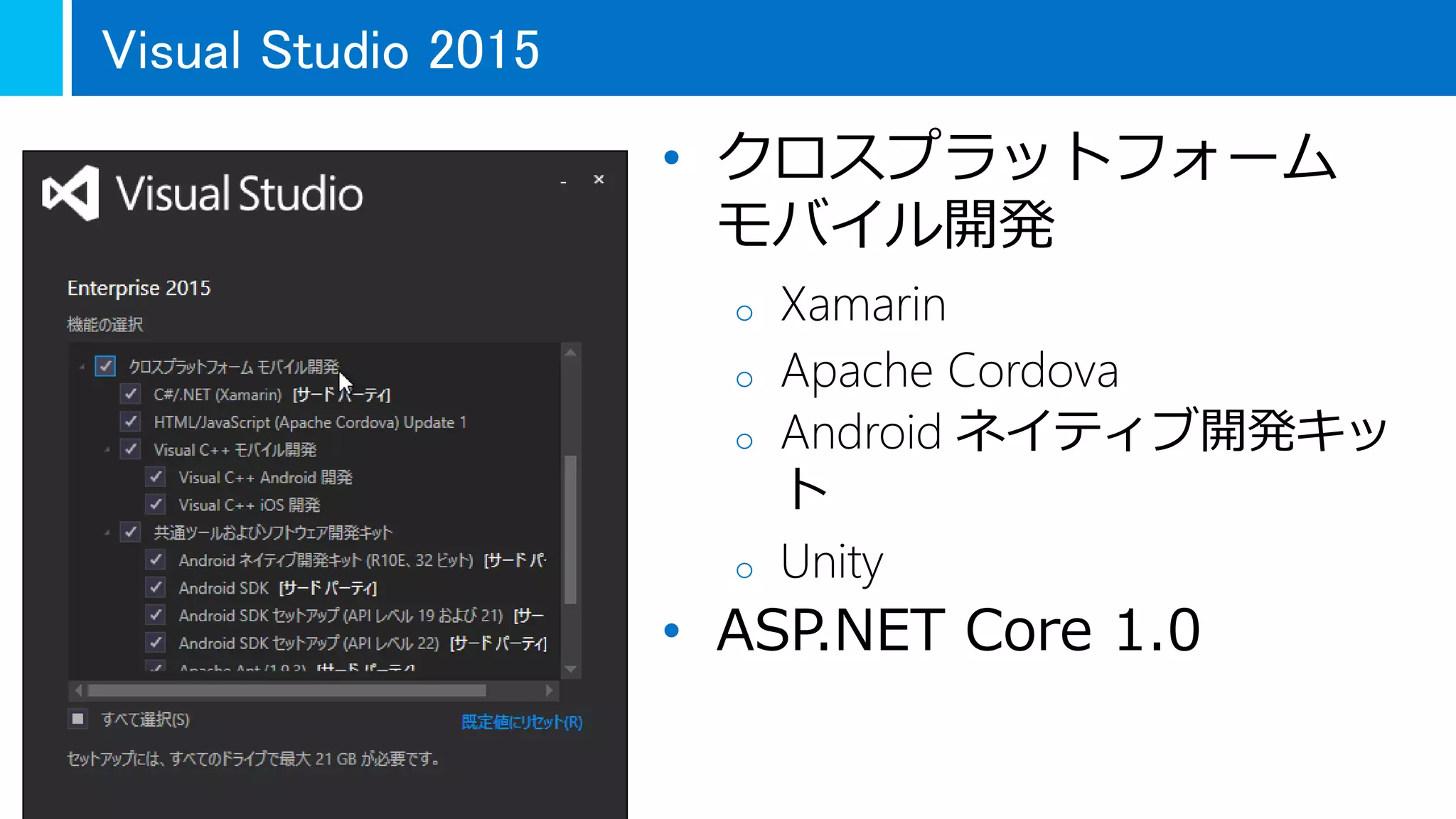
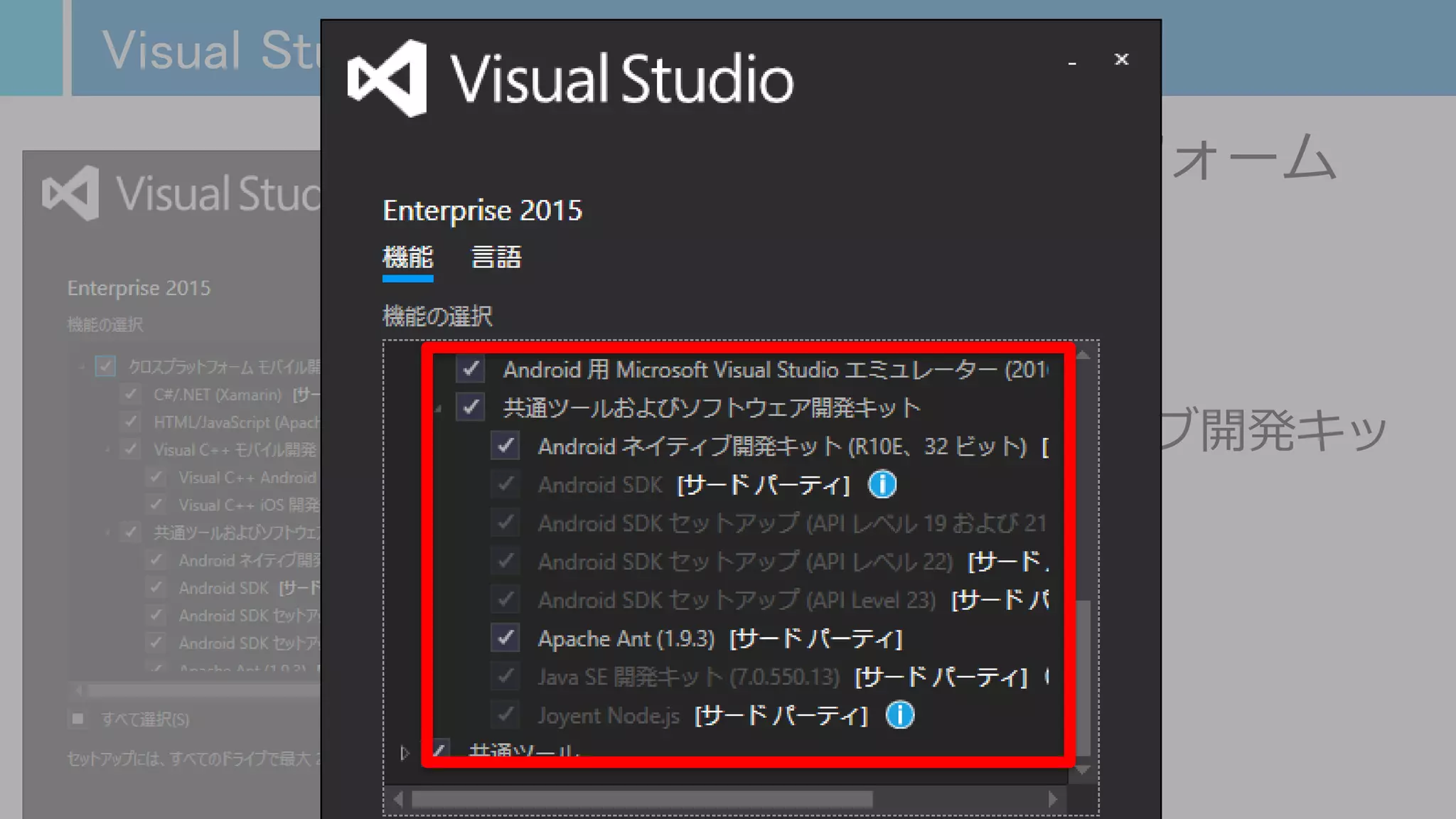
クロスプラットフォームな開発支援環境






















































![[Japan Tech summit 2017] APP 001](https://cdn.slidesharecdn.com/ss_thumbnails/techsummit2017pdfapp001-171115031546-thumbnail.jpg?width=640&height=640&fit=bounds)










![[TL04] .NET 15 周年の今こそ考えるクラウドネイティブ アプリケーションと .NET の活用](https://cdn.slidesharecdn.com/ss_thumbnails/tl04-170614050632-thumbnail.jpg?width=640&height=640&fit=bounds)









