General Simplex Method
Step 0: Generate an initial basic solution x(0). Let k = 0,
Go to Step 1.
Step 1: Check optimality of x(k). If x(k) is optimal, then
STOP, else go to Step 2.
Step 2: Check whether the LP is unbounded, if so
STOP, else go to Step 3.
Step 3: Generate another basic solution x(k+1) so that
cTx(k+1) ≤ cTx(k) . Let k = k + 1, go to Step 1.
4.
Example
1 2
1 3
24
1 2 3 4
minimize
subject to 1
1
0, 0, 0, 0
x x
x x
x x
x x x x
1 2
1
2
1 2
minimize
subject to 1
1
0, 0
x x
x
x
x x
5.
Example
4 differentextreme points (basic feasible solutions)
3
4
0
1
2
1
1
0
0
B
N
x
x x
v
x x
x
3
2
1
1
4
1
1
0
0
B
N
x
x x
v
x x
x
1
4
3
3
2
1
1
0
0
B
N
x
x x
v
x x
x
1
2
4
3
4
1
1
0
0
B
N
x
x x
v
x x
x
Adjacent Basic FeasibleSolution
v(0) and v(1) are adjacent, v(0) and v(2) are adjacent;
v(0) and v(3) are not adjacent.
v(2) and v(0) are adjacent, v(2) and v(3) are adjacent;
v(2) and v(1) are not adjacent.
Definition: Two different basic feasible solutions x any
y are said to be adjacent if they have exactly m-1 basic
variables in common.
For example, v(0) and v(1) are adjacent since they have
m-1=2-1=1 basic variable in common, i.e. x3; v(0) and v(1)
are adjacent as they have 0 basic variable in common.
8.
Simplex Method Details
–Check Optimal Ratio
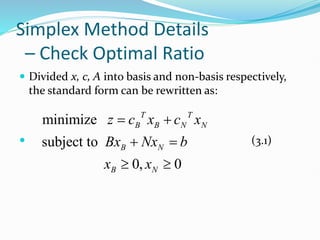
Divided x, c, A into basis and non-basis respectively,
the standard form can be rewritten as:
(3.1)
minimize
subject to
0, 0
T T
B B N N
B N
B N
z c x c x
Bx Nx b
x x
9.
Simplex Method Details
–Check Optimal Ratio
From the first constraint:
At optimal point , then .
Substituting xB into the objective:
1
B N
x B b Nx
1
1 1
* 1
T T
B N N N
T T T
B N B N
T T T
B B N B N
z c B b Nx c x
c B b c c B N x
c x c c B N x
0
N
x * 1
B
x B b
10.
Simplex Method Details
–Check Optimal Ratio
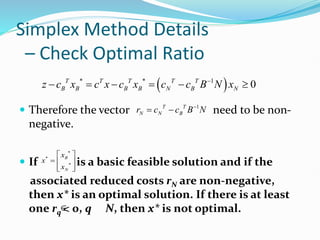
Therefore the vector need to be non-
negative.
If is a basic feasible solution and if the
associated reduced costs rN are non-negative,
then x* is an optimal solution. If there is at least
one rq < 0, q N, then x* is not optimal.
* * 1
0
T T T T T
B B B B N B N
z c x c x c x c c B N x
1
T T
N N B
r c c B N
*
*
*
B
N
x
x
x
11.
Example: Optimal Checking
12
1 3
2 4
1 2 3 4
minimize
subject to 1
1
0, 0, 0, 0
x x
x x
x x
x x x x
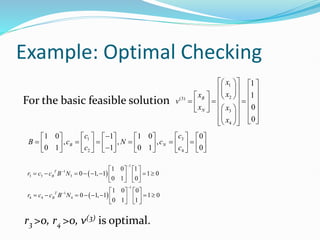
For the basic feasible solution
3
2
(1)
1
4
1
1
0
0
B
N
x
x
x
v
x x
x
3 1
4
2
1 0 0 1 0 1
, , ,
0 1 1 0 1 0
B N
c c
B c N c
c
c
1
1
1 1 1
1
1
4 4 4
1 0 1
1 0, 1 1 0
0 1 0
1 0 0
0 0, 1 1 0
0 1 1
T
B
T
B
r c c B N
r c c B N
r1 <0, v(1) is not optimal.
12.
Example: Optimal Checking
Forthe basic feasible solution
1
2
(3)
3
4
1
1
0
0
B
N
x
x
x
v
x x
x
3
1
2 4
1 0 1 1 0 0
, , ,
0 1 1 0 1 0
B N
c
c
B c N c
c c
1
1
3 3 3
1
1
4 4 4
1 0 1
0 1, 1 1 0
0 1 0
1 0 0
0 1, 1 1 0
0 1 1
T
B
T
B
r c c B N
r c c B N
r3 >0, r4 >0, v(3) is optimal.
13.
Simplex Method Details
–Moving to an Improved Adjacent Solution
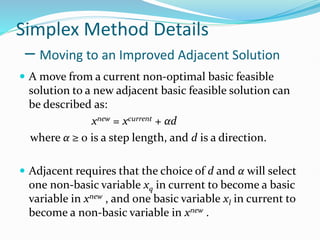
A move from a current non-optimal basic feasible
solution to a new adjacent basic feasible solution can
be described as:
xnew = xcurrent + αd
where α ≥ 0 is a step length, and d is a direction.
Adjacent requires that the choice of d and α will select
one non-basic variable xq in current to become a basic
variable in xnew , and one basic variable xl in current to
become a non-basic variable in xnew .
14.
Simplex Method Details
–Moving to an Improved Adjacent Solution
From a start point
to an adjacent point .
Expanding to the full n dimensions of vectors:
xnew = xcurrent + αd
which suggests direction , where
1 1 1
current
B N B N
Bx Nx b x B b B Nx B b
1 1 1
new current
B q q B q q
x B b B N x x B N x
1
0
new current
B B
new current
N N
x x B d
d d
x x
1
q
q
B N
d
e
0
0
1
0
q
e n m
qth
15.
Simplex Method Details
–Moving to an Improved Adjacent Solution
Theorem 3.1
Suppose x* is basis feasible solution with basic matrix
B and non-basis matrix N. For any non-basic variable
xq with rq < 0, the direction will lead to a
decrease in the objective function.
Proof: cTxnew = cT(xcurrent + αdq) < cTxcurrent
=> cTdq < 0 (α non-negative)
1
q
q
q
B N
d
e
1
1 1
0
T
q
B
T q T T T
B q N q q B q q
N q
B N
c
c d c B N c e c c B N r
c e
16.
Simplex Method Details
–Feasibility of a Descent Direction
Check xnew = xcurrent + αdq satisfy:
(1) Axnew = b (2) xnew ≥ 0
To show (1) we consider Axnew = A(xcurrent + αdq) =
Axcurrent + αAdq = b + αAdq = b => Adq = 0.
To show (2) xnew = xcurrent + αdq ≥ 0
Case 1: if dq ≥ 0, xnew = xcurrent + αdq ≥ 0 for any α ≥ 0.
but cTdq < 0 since rq < 0, cT(xcurrent + αdq) = cTxcurrent +
αcTdq -> -∞ as α -> ∞, therefore the LP is unbounded.
1
1
| 0
q
q
q q q q
q
B N
Ad B N BB N Ne N N
e
17.
Simplex Method Details
–Feasibility of a Descent Direction
Case 2: there is at least one component of dq that is
negative. By the requirement xcurrent + αdq ≥ 0 =>
αdq ≥ - xcurrent, thus the largest α is:
where is the index set of basic variables in xcurrent.
The determination of α is called the minimum ratio
test.
min | 0
current
j q
j
q
j B
j
x
d
d
B
18.
Simplex Method Details
–Direction and Step Length
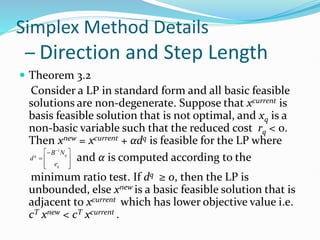
Theorem 3.2
Consider a LP in standard form and all basic feasible
solutions are non-degenerate. Suppose that xcurrent is
basis feasible solution that is not optimal, and xq is a
non-basic variable such that the reduced cost rq < 0.
Then xnew = xcurrent + αdq is feasible for the LP where
and α is computed according to the
minimum ratio test. If dq ≥ 0, then the LP is
unbounded, else xnew is a basic feasible solution that is
adjacent to xcurrent which has lower objective value i.e.
cT xnew < cT xcurrent .
1
q
q
q
B N
d
e
19.
Example: Direction andStep Length
1 2
1 3
2 4
1 2 3 4
minimize
subject to 1
1
0, 0, 0, 0
x x
x x
x x
x x x x
3
2
(1)
1
4
1
1
0
0
B
current
N
x
x
x
x v
x x
x
1
1
1 1 1
1 0 1
1 0, 1 1 0, is not optimal.
0 1 0
T current
B
r c c B N x
1
1
3
1
1
2
1 1
1
1 1
1
4
1
1 0 1
0
0 1 0
1
1
0
0
d
d
B N
d
e d
d
20.
Example: Direction andStep Length
Since there is at least one component of d1 is negative,
minimum ratio test for α :
xnew = xcurrent + αdq =
cT xnew = -2 < -1 = cT xcurrent
3
1
{3,2}
3
1
min | 0 1
1
current current
j q
j
q
j B
j
x x
d
d d
3
2
1
4
1 1 0
1 0 1
1
0 1 1
0 0 0
new
new
new
new
x
x
x
x
21.
Simplex Method
Step0: (Initialization)
Generate an initial basic solution x(0) = [xB | xN]T.
Let B be the basis matrix and N be the non-basis
matrix with corresponding partition c = [cB | cN]T.
Let and be the index sets of xB and xN .
Let k = 0, Go to Step 1.
Step 1: (Optimality Check)
Compute the reduced cost for all .
If rq ≥ 0 for all , x(k) is optimal, STOP, else select
one xq from non-basis such that rq < 0, Go to Step 2.
B N
1
T
q q B q
r c c B N
q N
q N
22.
Simplex Method
Step2: (Descent Direction Generation)
Construct .
If dq ≥ 0, then the LP is unbounded, else Go to Step 3.
Step 3: (Step Length Generation)
Compute the step length (the mini-
mum ratio test). Let j* be the index of basic variable
then attains the minimum ratio α. Go to Step 4.
Step 4: (Improved Adjacent Basic Feasible Solution)
Let x(k+1) = x(k) + αdq. Go to Step 5.
1
q
q
q
B N
d
e
min | 0
current
j q
j
q
j B
j
x
d
d
23.
Simplex Method
Step5: (Basis Update)
Let Bj* be the column in B associated with the leaving
basic variable xj*.
Update the basis matrix B by removing Bj* and adding
the column Nq, thus
Update the non-basis matrix N by removing Nq and
adding Bj*, thus
Let k = k+1, Go to Step 1.
*
B B j q
*
N N q j
24.
Example: Simplex Method
12
1 3
2 4
1 2 3 4
minimize
subject to 1
1
0, 0, 0, 0
x x
x x
x x
x x x x
Step 0: Initialization
3
4
(0)
1
2
1
1 1 0 1 0
with ,
0 0 1 0 1
0
B
N
x
x
x
x B N
x x
x
3
4
0 1
, , 3,4 , 1,2
0 1
B N
c
c c B N
c
25.
Example: Iteration 1
Step 1:
x(0) is not optimal, choose x1 as the non-basis variable
enter the basis. Go to Step 2
Step 2: Constructed
Step 3: Compute step length
. Go to Step 4.
1
1
1 1 1
1
1
2 2 2
1 0 1
1 0,0 1 0
0 1 0
1 0 0
1 0,0 1 0
0 1 1
T
B
T
B
r c c B N
r c c B N
1
1
1 1
1
1
1 0 1
0
0 1 0
0
1
1
0
0
B N
d
e
1 3
1 1
{3,4}
3
1
min | 0 1
1
current current
j
j
j B
j
x x
d
d d
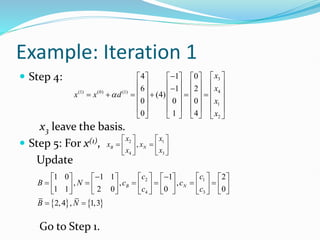
26.
Example: Iteration 1
Step 4:
x3 leave the basis.
Step 5: For x(1),
Update
Go to Step 1.
3
4
(1) (0) (1)
1
2
1 1 0
1 0 1
(1)
0 1 1
0 0 0
x
x
x x d
x
x
3
1
4 2
,
B N
x
x
x x
x x
3
1
4 2
1 0 1 0 1 0
, , ,
0 1 0 1 0 1
1,4 , 3,2
B N
c
c
B N c c
c c
B N
27.
Example: Iteration 2
Step 1:
x(1) is not optimal, choose x2 as the non-basis variable
enter the basis. Go to Step 2
Step 2: Constructed
Step 3: Compute step length
. Go to Step 4.
1
1
3 3 3
1
1
2 2 2
1 0 1
0 1,0 1 0
0 1 0
1 0 0
1 1,0 1 0
0 1 1
T
B
T
B
r c c B N
r c c B N
1
1
2 2
2
0
1 0 0
1
0 1 1
0
0
0
1
1
B N
d
e
2 4
2 1
{1,4}
4
1
min | 0 1
1
current current
j
j
j B
j
x x
d
d d
28.
Example: Iteration 2
Step 4:
x4 leave the basis.
Step 5: For x(2),
Update
Go to Step 1.
1
4
(2) (1) (2)
3
2
1 0 1
1 1 0
(1)
0 0 0
0 1 1
x
x
x x d
x
x
3
1
2 4
,
B N
x
x
x x
x x
3
1
2 4
1 0 1 0 1 0
, , ,,
0 1 0 1 1 0
1,2 , 3,4
B N
c
c
B N c c
c c
B N
29.
Example: Iteration 3
Step 1:
rN ≥ 0, STOP. x(2) is optimal.
The path of the iterations is
v(0) -> v(2) -> v(3)
If we chose x2 as enter vari-
able in iteration 1, the path
will be v(0) -> v(1) -> v(3)
1
1
3 3 3
1
1
4 4 4
1 0 1
0 1, 1 1 0
0 1 0
1 0 0
0 1, 1 1 0
0 1 1
T
B
T
B
r c c B N
r c c B N
30.
Initial Basis Generation
–Two Phase Method
Artificial variables
In the case where it is difficult to identify identity sub-
matrix, in the constraint set Ax = b, one can add
artificial variables to create an identity sub-matrix.
E.g. x1 + 2x2 + x3 + x4 = 4
-x1 - x3 - x5 = 3
The basis is hard to find, we add x6 and x7 to the
constraints,
x1 + 2x2 + x3 + x4 + x6 = 4
-x1 - x3 - x5 + x7 = 3
1 2 1 1 0 1 0 4
,
1 0 1 0 1 0 1 3
A b
31.
Initial Basis Generation
–Two Phase Method
Consider a standard form of a Linear Programming (SFLP)
And consider the addition of artificial variables (ALP)
The relationship between SFLP and ALP as follows:
(1) If SFLP has a feasible solution, then ALP has a feasible
solution with xa = 0.
(2) If ALP has a feasible solution with xa = 0, then SFLP has
a feasible solution.
minimize
subject to
0
T
c x
Ax b
x
minimize
subject to
0
T
a
c x
Ax x b
x
32.
Initial Basis Generation
–Two Phase Method
Phase I:
The Phase I problem can be initialized with the basic
solution x = 0, xa = b.
Let be the optimal solution to Phase I.
Case 1: If xa
* ≠ 0, then the original LP is infeasible.
Case 2: otherwise xa
* = 0 with 2 sub-cases:
minimize 1
subject to
0, 0
T
a
a
a
x
Ax x b
x x
*
*
a
x
x
x
33.
Initial Basis Generation
–Two Phase Method
Subcase 1: All xa
* in the non-basis, then discard the
artificial variables in ALP and use the x* as a starting
solution for Phase II problem:
Subcase 2: Some of the artificial variables are basic
variables. Then exchange such an artificial basic
variable with a current non-basis and non-artificial
variables xq. Let xa
*i be such artificial variable in the jth
position among xB. There are 2 sub-subcases:
minimize
subject to
0, 0
T T
B B N N
B N
B N
c x c x
Bx Nx b
x x
34.
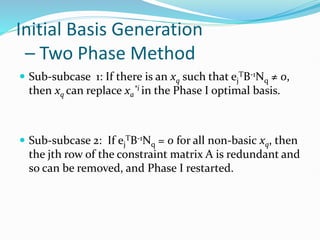
Initial Basis Generation
–Two Phase Method
Sub-subcase 1: If there is an xq such that ej
TB-1Nq ≠ 0,
then xq can replace xa
*i in the Phase I optimal basis.
Sub-subcase 2: If ej
TB-1Nq = 0 for all non-basic xq, then
the jth row of the constraint matrix A is redundant and
so can be removed, and Phase I restarted.
35.
Example: Two PhaseMethod
Phase I:
1 2
1 2
1 2
1 2
1 2
minimize 2
subject to 2
2 3
2 4
0, 0
x x
x x
x x
x x
x x
6 7 8
1 2 3 6
1 2 4 7
1 2 5 8
1 2 3 4 5 6 7 8
minimize
subject to + 2
2 + 3
2 + 4
, , , , , , , 0
x x x
x x x x
x x x x
x x x x
x x x x x x x x
36.
Example: Two PhaseMethod
Solving Phase I by simplex method gives optimal
solution
1 1
6 6 2 2
7 7 3 3
8 8 4 4
5 5
0 0
2 1 0 0
3 , 1 , 0 , 0
4 1 0 0
0 0
1 0 0 1 1
0 1 0 ,
0 0 1
B B N N
x c
x c x c
x x b c c x x c c
x c x c
x c
B N
1 0 0
1 2 0 1 0
2 1 0 0 5
6,7,8 , 1,2,3,4,5 ,
B N
1
* *
2 4 5 6 7 8
3
1
2 , 0 0 0 0 0
1
T T
B N
x
x x x x x x x x
x
37.
Example: Two PhaseMethod
xa
* = [x6, x7, x8]T = [0 0 0]T, and are all in non-basis,
then reformulate Phase II problem:
And use the initial basic feasible solution x* from
Phase I, we finally get the optimal solution:
x1 = 1/3, x2 = 5/3, x3 = 1, x4 = 0, x5 = 5/3,
1 2
1 2 3
1 2 4
1 2 5
1 2 3 4 5
minimize 2
subject to 2
2 3
2 4
, , , , 0
x x
x x x
x x x
x x x
x x x x x
38.
Initial Basis Generation
–Big M Method
The Big M problem is
where M > 0 is a large parameter.
The Big M problem can be solved by the Simplex
Method with the initial basic feasible solution xa = b as
basic variables and x = 0 as the non-basic variables.
One of two cases will be resulted in by Big M method:
minimize 1
subject to
0, 0
T T
a
a
a
c x M x
Ax x b
x x
39.
Initial Basis Generation
–Big M Method
Case 1: Solving the Big M model results in a finite
optimal solution
Subcase 1: If xa
* = 0, then x* is the optimal for the
original LP.
Subcase 2: If xa
* ≠ 0, then the original LP is infeasible.
Case 2: The Big M problem is unbounded below.
Subcase 1: If xa
* = 0, then the original LP is also
unbounded below.
Subcase 2: If at least one artificial variable is non-
zero, then the original LP is infeasible.
*
*
a
x
x
x
40.
Example: Big MMethod
Solving by Simplex method, the optimal solution is:
x1 = 1/3, x2 = 5/3, x3 = 0, x4 = 0, x5 = 5/3,
x6 = 0, x7 = 0, x7 = 0.
Since xa
* = [x6, x7, x8]T = [0 0 0]T, the solution is
optimal to original LP.
1 2 6 7 8
1 2 3 6
1 2 4 7
1 2 5 8
1 2 3 4
minimize 2
subject to + 2
2 + 3
2 + 4
, , , ,
x x Mx Mx Mx
x x x x
x x x x
x x x x
x x x x x
5 6 7 8
, , , 0
x x x
41.
Degeneracy
It ispossible for basic feasible solutions has some basic
variables with zeros values i.e. these basic feasible
solution are degenerate.
Suppose xd be a degenerate basic feasible solution, and
xnew = xd + αdq is feasible, i.e.
Axnew = b xnew = xd + αdq ≥ 0
since some of the basic variables in xd are zero, then
the minimum ratio test may set α to 0. In such case,
the value of xnew and xd are same, and there is no
improvement in objective value. However, xnew is
distinct from and adjacent to xd.
Cycling
It ispossible that the Simplex Method return a basic
feasible solution that was visited in the previous
iterations, i.e. cycling occurs.
Beale’s (1955) example
4 5 6 7
1 4 5 6 7
2 4 5 6 7
3 6
1 1
minimize 20 6
4 2
1
subject to 8 9 0
4
1 1
12 3 0
2 2
1
x x x x
x x x x x
x x x x x
x x
1 2 3 4 5 6 7
, , , , , , 0
x x x x x x x
44.
Cycling
Using initialB associated with x1, x2 and x3, the
following iterations are obtained:
iteration Enter
variable
Leaving
variable
Basic variables Obj val
0 x1=0, x2=0, x3=1, 0
1 x4 x1 x4=0, x2=0, x3=1, 0
2 x5 x2 x4=0, x5=0, x3=1, 0
3 x6 x4 x6=0, x5=0, x3=1, 0
4 x7 x5 x6=0, x7=0, x3=1, 0
5 x1 x6 x1=0, x7=0, x3=1, 0
6 x2 x7 x1=0, x2=0, x3=1, 0
45.
Anti-Cycling Rules
– Bland’sRule
Bland’s Rule:
(1)For non-basic variables with negative reduced costs,
select the variables with smallest index to enter the
basis.
(2)If there is a tie in the minimum ratio test select the
variables with smallest index to leave the basis.
Bland (1977) proof that if the Simplex Method uses
Bland’s Rule, then the Simplex Method will not cycle.
46.
Anti-Cycling Rules
– Bland’sRule
Starting from iteration 4, the iterations are different
when using Bland’s rule.
iteration Enter
variable
Leaving
variable
Basic variables Obj val
0 x1=0, x2=0, x3=1, 0
1 x4 x1 x4=0, x2=0, x3=1, 0
2 x5 x2 x4=0, x5=0, x3=1, 0
3 x6 x4 x6=0, x5=0, x3=1, 0
4 x1 x5 x6=0, x1=0, x3=1, 0
5 x2 x3 x6=1, x1=1, x2=1/2, -1/2
6 x4 x2 x6=1, x1=3/4, x4=1, -5/4
47.
Anti-Cycling Rules
– LexicographicMethod
Dantzig et al. (1955) present Lexicographic Method
which is to eliminate degeneracy, and finally prevent
the cycling.
Consider LP:
Assign a small positive constant εi to the RHS of ith
constraint with the order 0 << εm << … << ε2 << ε1.
1 1
2 2
minimize
subject to
0
T
T
T
T
m m
c x
a x b
a x b
a x b
x
48.
Anti-Cycling Rules
– LexicographicMethod
Adding such constants to the right hand side will
ensure that there is a unique variable to leave the basis
during an iteration
The enter variable can be selected any non-basic
variables with negative reduced cost.
1 1 1
2 2 2
minimize
subject to
0
T
T
T
T
m m m
c x
a x b
a x b
a x b
x
49.
Anti-Cycling Rules
– LexicographicMethod
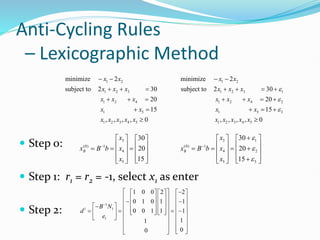
Step 0:
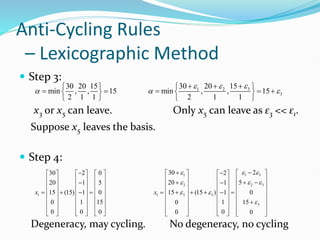
Step 1: r1 = r2 = -1, select x1 as enter
Step 2:
1 2 1 2
1 2 3 1 2 3 1
1 2 4
minimize 2 minimize 2
subject to 2 30 subject to 2 30
20
x x x x
x x x x x x
x x x
1 2 4 2
1 5 1 5 3
1 2 3 4 5
20
15 15
, , , , 0
x x x
x x x x
x x x x x
1 2 3 4 5
, , , , 0
x x x x x
3 3 1
(0) 1 (0) 1
4 4 2
5 5 3
30
30
20 20
15 15
B B
x x
x B b x x B b x
x x
1
1 1
1
1 0 0 2 2
0 1 0 1 1
0 0 1 1 1
1
1
0
0
B N
d
e
Anti-Cycling Rules
– LexicographicMethod
Theorem 3.3
Assume that the constraint matrix of a linear program
has full row rank m. If the leaving variable is
determined by Lexicographic Method, then the
Simplex Method will always terminate.
52.
Revised Simplex Method
Simplex Method require the basis B is invertible
during iteration, this is computational expensive in
practice.
A better idea is to generate an inverse B-1 by solving an
equivalent linear system of equations.
For example, to compute the reduced costs the linear
system BTπ = cB is solved first for and then the vector
rN = cN – πTN can be easily computed.
In practice, triangular factorization such as LU decom-
position to solve the square system can enhance both
the numerical stability and reduce space requirement
53.
Revised Simplex Method
Step 0: (Initialization)
Generate an initial basic solution x(0) = [xB | xN]T.
Let B be the basis matrix and N be the non-basis
matrix with corresponding partition c = [cB | cN]T.
Let and be the index sets of xB and xN .
Let k = 0, Go to Step 1.
Step 1: (Optimality Check)
Solve for π in the linear system BTπ = cB.
Compute the reduced cost rq = cq - π TNq for all .
If rq ≥ 0 for all , x(k) is optimal, STOP, else select
one xq from non-basis such that rq < 0, Go to Step 2.
B N
q N
q N
54.
Revised Simplex Method
Step 2: (Descent Direction Generation)
Solve for d in the linear system Bd = -Nq.
Construct .
If dq ≥ 0, then the LP is unbounded, else Go to Step 3.
Step 3: (Step Length Generation)
Compute the step length (the minimum
ratio test). Let j* be the index of basic variable
then attains the minimum ratio α. Go to Step 4.
Step 4: (Improved Adjacent Basic Feasible Solution)
Let x(k+1) = x(k) + αdq. Go to Step 5.
1
q
q
q
B N
d
e
min | 0
current
j q
j
q
j B
j
x
d
d
55.
Revised Simplex Method
Step 5: (Basis Update)
Let Bj* be the column in B associated with the leaving
basic variable xj*.
Update the basis matrix B by removing Bj* and adding
the column Nq, thus
Update the non-basis matrix N by removing Nq and
adding Bj*, thus
Let k = k+1, Go to Step 1.
*
B B j q
*
N N q j
56.
Example: Revised SimplexMethod
1 2
1 2 3
1 2 4
1 2 3 4
minimize 2
subject to 4
2 6
0, 0, 0, 0
x x
x x x
x x x
x x x x
Step 0: Initialization
3
4
(0)
1
2
4
6 1 0 1 1
with ,
0 0 1 2 1
0
B
N
x
x
x
x B N
x x
x
3
4
0 2
, , 3,4 , 1,2
0 1
B N
c
c c B N
c
57.
Example: Iteration 1
Step 1: Solve BTπ = cB i.e.
x(0) is not optimal, choose x2 as enter. Go to Step 2
Step 2: Solve Bd = -Nq i.e.
Step 3: Compute step length
. Go to Step 4.
1 1 1 2 2 2
1 1
2 0,0 2 0; 1 0,0 1 0
2 1
T T
r c N r c N
2
2
1
1
0
0
1
d
d
e
2 3 3
2 2 2
{3,4}
3 4
4 6
min | 0 , , 4
1 1
current current current
j
j
j B
j
x x x
d
d d d
1 1
2 2
1 0 0 0
0 1 0 0
T
1 1
2 2
1 0 1 1
0 1 1 1
d d
d
d d
58.
Example: Iteration 1
Step 4:
x3 leave the basis.
Step 5: For x(1),
Update
Go to Step 1.
3
4
(1) (0) (1)
1
2
4 1 0
6 1 2
(4)
0 0 0
0 1 4
x
x
x x d
x
x
1
2
3
4
,
B N
x
x
x x
x
x
1
2
3
4
1 0 1 1 1 2
, , ,
1 1 2 0 0 0
2,4 , 1,3
B N
c
c
B N c c
c
c
B N
Complexity of theSimplex Method
Definition:
A function g(n) = O(f(n)) (or Big-O of f(n) if there is
constant C > 0 such that for sufficiently large n)
g(n) ≤ Cf(n)
E.g. the polynomial g(n) = 2n2 +3n +4 = O(n2)
since g(n) ≤ 4f(n) = 4n2 for n ≥ 3 where f(n) = n2.
For LP (or any problem), an algorithm is said to have
polynomial time worst case complexity if the number of
the operations required in the worst case is a polynomial
function of the size of the problem.
An algorithm is said to be exponential if the worst case
complexity grows exponentially in the size of the problem.
61.
Klee-Minty Problems
Kleeand Minty (1972) shows following LP with 2m
variables and m constraints in standard form
The simplex method has to enumerate all possible
selection of m variables out of the 2m variables i.e. .
If m = 50, then that will take 3 trillion years to
finished by a computer with capacity of 1 billion iterations
per second.
1
1
1
1
minimize 10
subject to 2 10 100 , 1,...,
0, , 0
m m j
j
j
i i j i j
j i
j
m
x
x x i m
x x
2m
m
29
100
10
50
62.
Simplex Method MATLABCode
The standard LP can be solved by
function [xsol objval iter exitflag]=SimplexMethod(c, Aeq, beq, B_set)
Inputs:
c = n×1 vector, objective coefficient
Aeq = m×n matrix with m < n
beq = m×1 vector, RHS
B_set = m×1 vector, subscript set of basis
Outputs:
xsol = n*1 vector, final solution
objval is a scalar, final objective value
iter including all iteration details
exitflag describes the exit condition of the problem as follows:
0 - optimal solution
1 - unbounded problem















![Simplex Method
Step 0: (Initialization)
Generate an initial basic solution x(0) = [xB | xN]T.
Let B be the basis matrix and N be the non-basis
matrix with corresponding partition c = [cB | cN]T.
Let and be the index sets of xB and xN .
Let k = 0, Go to Step 1.
Step 1: (Optimality Check)
Compute the reduced cost for all .
If rq ≥ 0 for all , x(k) is optimal, STOP, else select
one xq from non-basis such that rq < 0, Go to Step 2.
B N
1
T
q q B q
r c c B N
q N
q N
](https://image.slidesharecdn.com/chapter3simplexmethod-250502042216-915892f4/85/intro-to-linear-optimization-and-extensions-21-320.jpg)














![Example: Two Phase Method
xa
* = [x6, x7, x8]T = [0 0 0]T, and are all in non-basis,
then reformulate Phase II problem:
And use the initial basic feasible solution x* from
Phase I, we finally get the optimal solution:
x1 = 1/3, x2 = 5/3, x3 = 1, x4 = 0, x5 = 5/3,
1 2
1 2 3
1 2 4
1 2 5
1 2 3 4 5
minimize 2
subject to 2
2 3
2 4
, , , , 0
x x
x x x
x x x
x x x
x x x x x
](https://image.slidesharecdn.com/chapter3simplexmethod-250502042216-915892f4/85/intro-to-linear-optimization-and-extensions-37-320.jpg)


![Example: Big M Method
Solving by Simplex method, the optimal solution is:
x1 = 1/3, x2 = 5/3, x3 = 0, x4 = 0, x5 = 5/3,
x6 = 0, x7 = 0, x7 = 0.
Since xa
* = [x6, x7, x8]T = [0 0 0]T, the solution is
optimal to original LP.
1 2 6 7 8
1 2 3 6
1 2 4 7
1 2 5 8
1 2 3 4
minimize 2
subject to + 2
2 + 3
2 + 4
, , , ,
x x Mx Mx Mx
x x x x
x x x x
x x x x
x x x x x
5 6 7 8
, , , 0
x x x ](https://image.slidesharecdn.com/chapter3simplexmethod-250502042216-915892f4/85/intro-to-linear-optimization-and-extensions-40-320.jpg)










![Revised Simplex Method
Step 0: (Initialization)
Generate an initial basic solution x(0) = [xB | xN]T.
Let B be the basis matrix and N be the non-basis
matrix with corresponding partition c = [cB | cN]T.
Let and be the index sets of xB and xN .
Let k = 0, Go to Step 1.
Step 1: (Optimality Check)
Solve for π in the linear system BTπ = cB.
Compute the reduced cost rq = cq - π TNq for all .
If rq ≥ 0 for all , x(k) is optimal, STOP, else select
one xq from non-basis such that rq < 0, Go to Step 2.
B N
q N
q N
](https://image.slidesharecdn.com/chapter3simplexmethod-250502042216-915892f4/85/intro-to-linear-optimization-and-extensions-53-320.jpg)







![Simplex Method MATLAB Code
The standard LP can be solved by
function [xsol objval iter exitflag]=SimplexMethod(c, Aeq, beq, B_set)
Inputs:
c = n×1 vector, objective coefficient
Aeq = m×n matrix with m < n
beq = m×1 vector, RHS
B_set = m×1 vector, subscript set of basis
Outputs:
xsol = n*1 vector, final solution
objval is a scalar, final objective value
iter including all iteration details
exitflag describes the exit condition of the problem as follows:
0 - optimal solution
1 - unbounded problem](https://image.slidesharecdn.com/chapter3simplexmethod-250502042216-915892f4/85/intro-to-linear-optimization-and-extensions-62-320.jpg)
![Example 1: Bounded
minimize –x1 – x2 minimize –x1 – x2
subject to x1 ≤ 1 subject to x1 + x3 = 1
x2 ≤ 1 => x2 + x4 = 1
x1 ≥ 0, x2 ≥ 0 x1 ≥ 0, x2 ≥ 0, x3 ≥ 0, x4 ≥ 0
Solve by following MATLAB code:
>> c = [-1; -1; 0; 0;];
>> Aeq = [1 0 1 0; 0 1 0 1]; Beq = [1; 1];
>> B_set = [3; 4]; % the subscript of basic variables
>> [xsol fval iter_detail exitflag]=SimplexMethod(c, Aeq, beq, B_set)
probelm solved
xsol = [1 1 0 0]T
fval = -2
iter_detail = [1x1 struct] [1x1 struct] [1x1 struct]
exitflag = 0](https://image.slidesharecdn.com/chapter3simplexmethod-250502042216-915892f4/85/intro-to-linear-optimization-and-extensions-63-320.jpg)
![Example 2: Unboundedness
minimize –x1 – x2
subject to –2x1 + x2 + x3 = 1
x1 – x2 + x4 = 1
x1 ≥ 0, x2 ≥ 0, x3 ≥ 0, x4 ≥ 0
Solve by following MATLAB code:
>> c=[-1; -1; 0; 0;];
>> Aeq=[-2 1 1 0; 1 -1 0 1]; beq=[1;1];
>> B_set=[3; 4]; % the subscript of basic variables
>> [xsol fval iter_detail exitflag]=SimplexMethod(c, Aeq, beq, B_set)
unbounded problem
xsol = []
fval = []
iter_detail = []
exitflag = 1](https://image.slidesharecdn.com/chapter3simplexmethod-250502042216-915892f4/85/intro-to-linear-optimization-and-extensions-64-320.jpg)