Downloaded 20 times

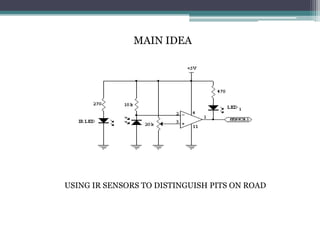

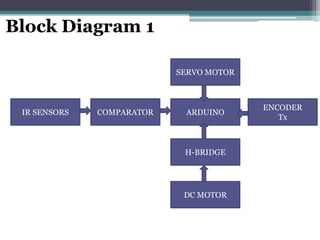
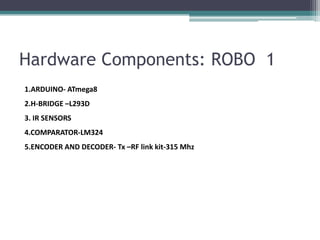
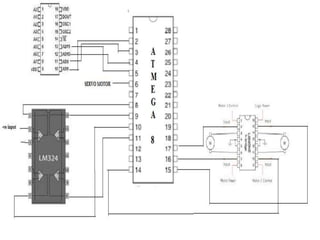
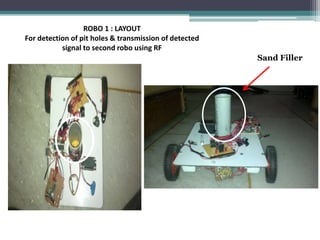
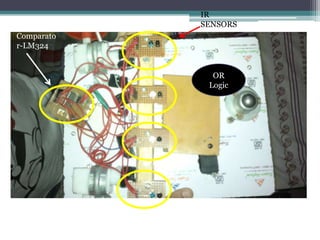
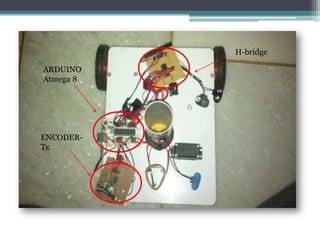
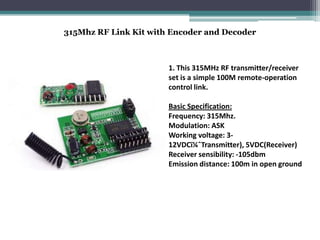
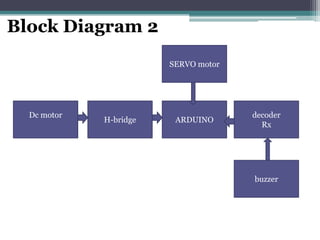
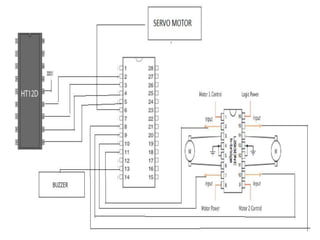
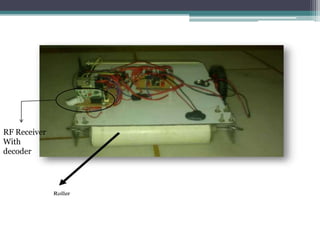
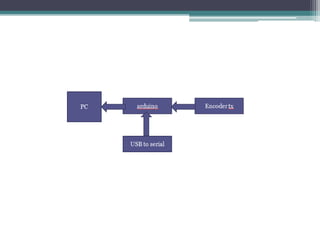

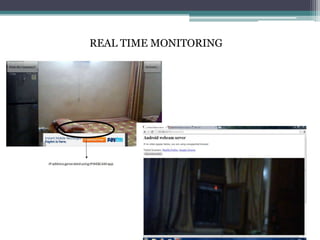

This document describes an intelligent road roller that uses IR sensors to detect pits in the road. It has two main components: 1. Robo 1 uses IR sensors, a comparator, Arduino, H-bridge and encoder to detect pit holes and transmit the signals via RF link to Robo 2. 2. Robo 2 receives the signals via an RF receiver and decoder connected to a servo motor, DC motor and buzzer. The system allows for real-time monitoring of pit detection on the road surface.
































![PPT On IOT BasedAutomatic Bumper [Autosaved].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/pptoniotbasedautomaticbumperautosaved-240315163352-7fb59c2d-thumbnail.jpg?width=640&height=640&fit=bounds)