Download as PDF, PPTX




![w w w . m a t a m o r o s . t e c n m . m x
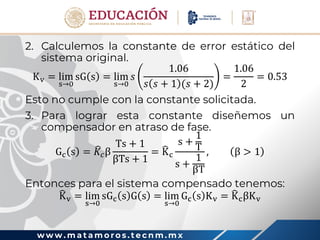
Un compensador de retardo, Gc(s), se caracteriza
por la siguiente función de transferencia.
Gc s = 𝐾𝑐β
Ts + 1
βTs + 1
= Kc
s +
1
T
s +
1
βT
, β > 1
Si se sitúan el cero y el polo del compensador de
retardo muy cerca uno del otro, en s=s1, donde s1
es uno de los polos dominantes en lazo cerrado,
las magnitudes s1+(1/T) y s1+[1/(T)] serán casi
iguales, o bien:
Gc(s1) = Kc
𝑠1 +
1
T
𝑠1 +
1
βT
≈ Kc](https://image.slidesharecdn.com/i4baboq4rqcujkurg2oq-signature-44dab142d5bbe9ae453207a014dcb0f55da0451802213b7cd65b305efe7e9474-poli-210318041019/85/Ingenieria-de-control-Tema-2-compensacion-LGR-41-320.jpg)
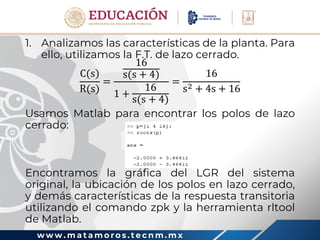

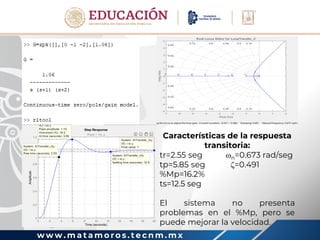
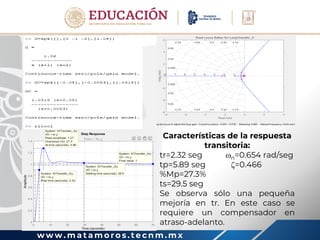
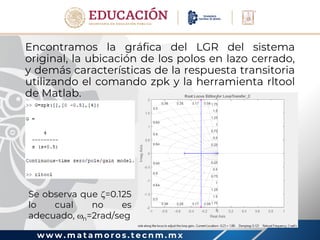
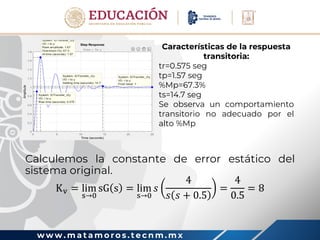
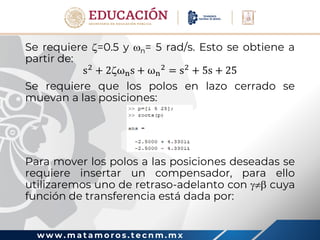
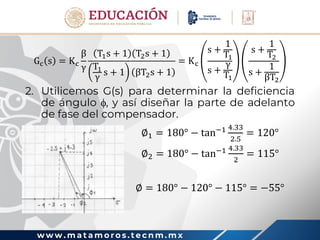
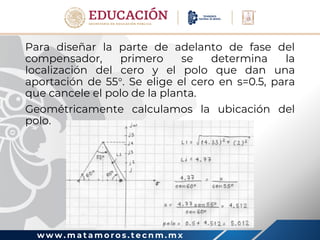
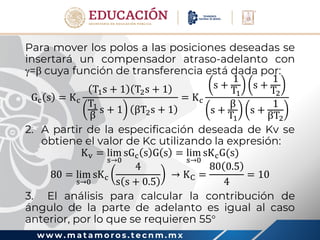
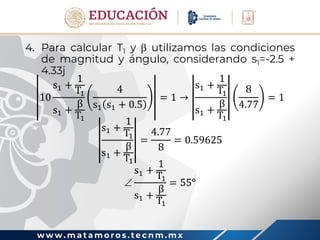
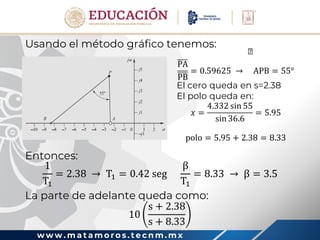
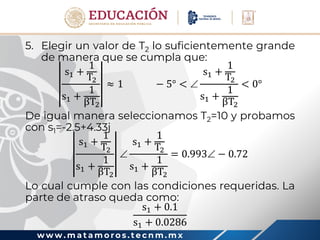
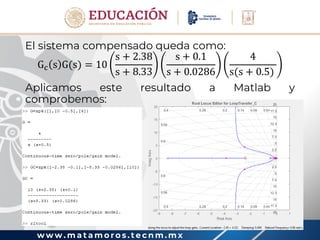


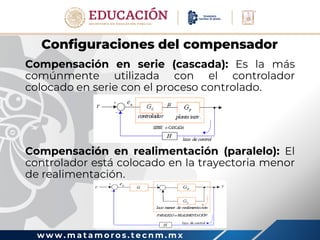
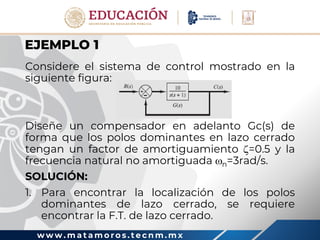
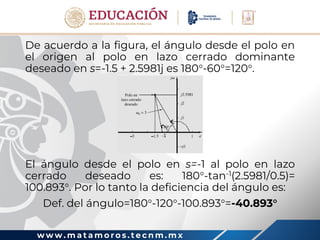
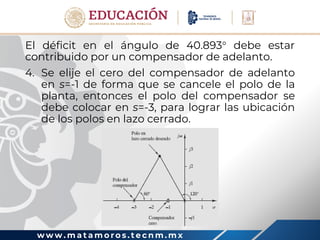
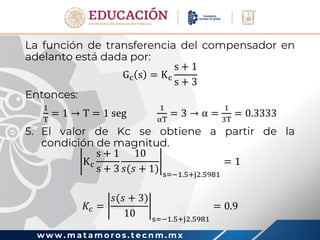
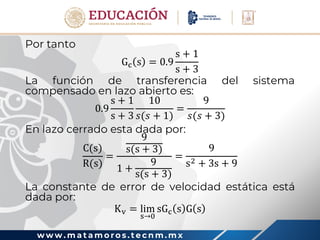
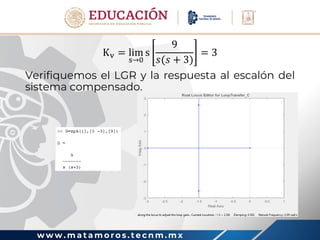
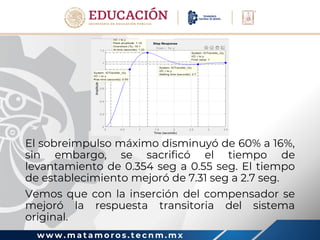
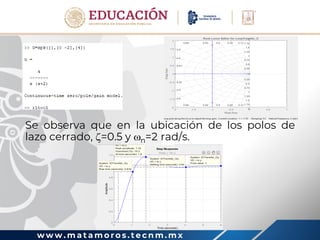
The document discusses the design of control system compensators using the root locus method (LGR) and frequency response (RF) methods. It covers introducing compensators to improve closed-loop response, different types of compensators (lead, lag, lead-lag), and the process for designing lead compensators using root locus graphs. An example is provided to illustrate how to design a lead compensator to place dominant closed-loop poles at a desired location on the s-plane to meet specifications like damping ratio and natural frequency.























































































