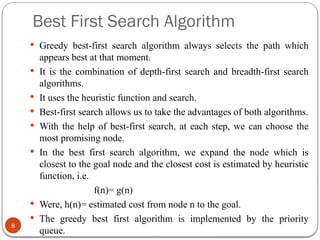
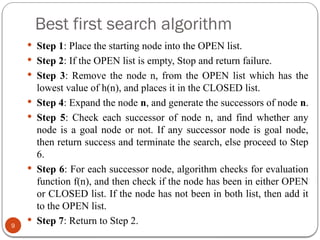
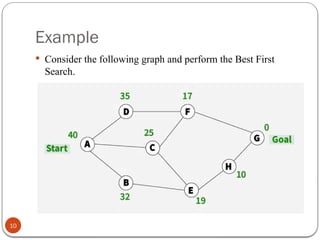
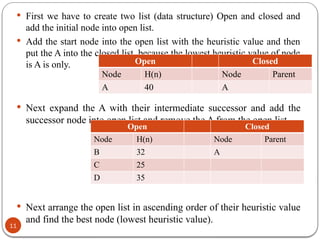
The document provides an overview of informed search algorithms, highlighting the role of heuristics in enhancing search efficiency by utilizing information about the goal state. It discusses the benefits of informed searches over blind searches, including improved pattern recognition, decision-making, and navigating complex problem spaces. It also details specific algorithms like best-first and A* search, and outlines their methodologies, advantages, and applications.
![16
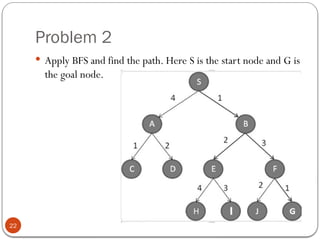
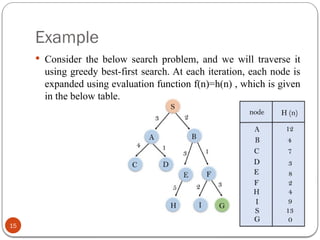
Expand the nodes of S and put in the CLOSED list
Initialization: Open [A, B], Closed [S]
Iteration 1: Open [A], Closed [S, B]
Iteration 2: Open [E, F, A], Closed [S, B]
Open [E, A], Closed [S, B, F]
Iteration 3: Open [I, G, E, A], Closed [S, B, F]
Open [I, E, A], Closed [S, B, F, G]
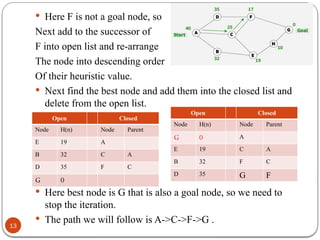
Hence the final solution path will be:
S----> B----->F----> G](https://image.slidesharecdn.com/7-240823073226-f20dc37f/85/Informed-Search-in-Artifical-Intelligence-16-320.jpg)